Moumoute ! Je vais voir ça

 5 note(s)
5 note(s)
Mes robots web sécurisés avec accès publique !
Débuté par Serveurperso, avril 08 2017 02:43
Robot Node.js Serveur Web UHF Faible latence Radioamateur PIC32 HTML5 H.264
245 réponses à ce sujet
#61

Serveurperso
-
- Membres
-

- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 12 avril 2017 - 09:47
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#62
Ulysse
-

- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 17 mai 2017 - 07:16
C'est marrant, je me rend compte maintenant que j'avais dans mes favoris un raccourci vers http://www.serveurperso.com/depuis un bon moment, c'est maintenant que je percute qu'il s'agit de ce sujet :-)
#63
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 17 mai 2017 - 07:40
Hop voici une vidéo youtube faite à l'arrache (non répertoriée) du premier test de mon autopilote qui permet de déplacer le robot en quelques clics sur la grille d'occupation probabiliste (et bientôt la vidéo) ou lieu de piloter manuellement les vélocités X/Y/Theta :
100% odométrie, le cerveau humain reconnait les zones sur la carte et corrige en live entre chaque clics sans se rendre compte.
Un clic ne fait que changer les coordonnées absolues de la cible dans la trame et le robot se démerde pour y aller. Les trames sont toujours minuscule, toutes redondantes entre elles comme en RC, du coup ça encaisse une mauvaise liaison dans les 2 sens.
Il reste éventuellement à ajouter des algos de "contournement d'obstacles" simples qui fonctionneront en parallèle pour éviter que l'anti collision logique floue arrête le robot quand on frotte virtuellement un obstacle.
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)

#66
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 17 mai 2017 - 11:00
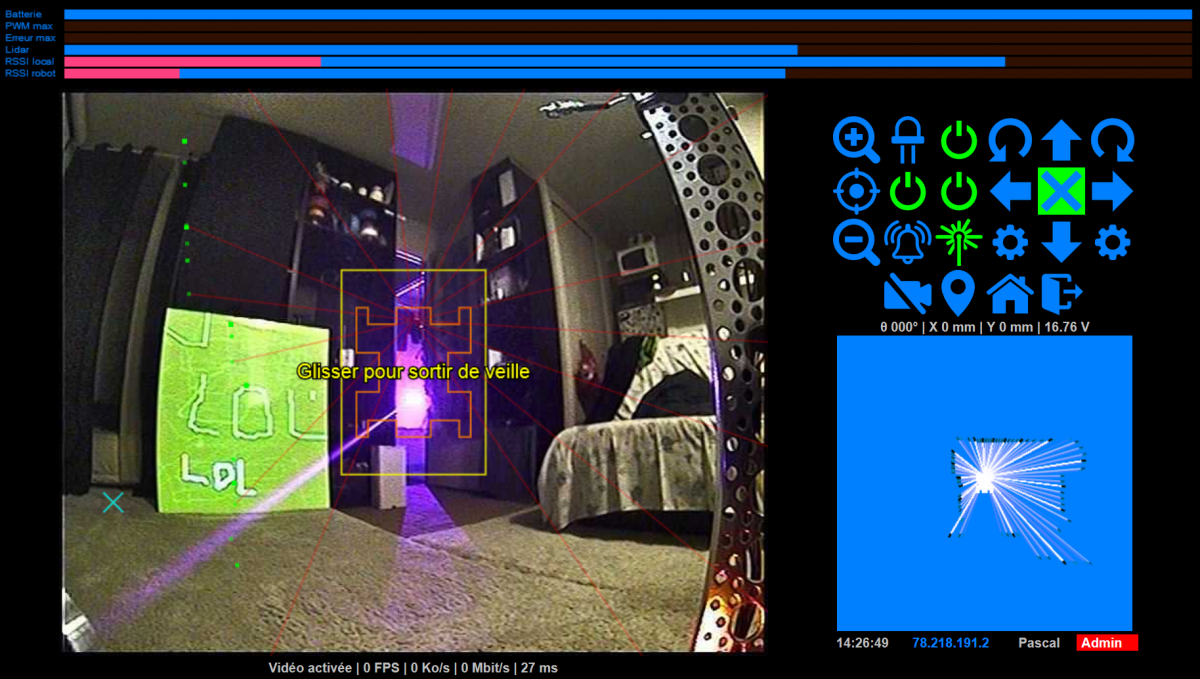
Vidéo plus longue (et public sur youtube)
J'ai amélioré l'interface "d'auto" pilotage il est possible de cliquer sur l'image et il se rend direct au point 2D cible.
Sur la petite carte il est possible de glisser déplacer pour refresh la cible dans chaque trames, du coup il suit le pointage comme un bon toutou.
Une ligne indique la cible et donc le robot donne l'impression d'avaler la ligne:D
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)

#68
Mike118
-

- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 18 mai 2017 - 10:45
Featuring Mike118 en invité sur la vidéo ! 
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#69
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 19 mai 2017 - 11:59
La suite :
- il faut que je réalise la grille d'occupation probabiliste embarquée dans le PIC32 - 10 mètres sur 10 mètres avec des pixels <= 10cm de côtés = 10Ko de RAM pour 8 bits par pixels. j'ai a l'aise la place de stocker deux matrices pour du traitement.
- recaler régulièrement l'erreur d'odométrie à l'aide d'un moyen de localisation absolu, je pense faire de l'optique (matrice IR ou caméra).
Il me faut trouver un hardware de qualité pour la vision (openCV...) avec avant tout un bon objectif - strict minimum comme celui de la CMUcam5 Pixy - car celui de la "jevois" est un type pin-hole et ça non merci les faibles ouvertures dans l'obscurité en sensibilité c'est naze... Dommage car jevois semble plus performant (GPU...)
Le but c'est de faire tourner ArUco. Je vais surement devoir faire mon propre truc avec une PI 3 et une PIcam modifiée objectif CS grande ouverture.
https://www.uco.es/i...pos/ava/node/26
- Mike118 aime ceci
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#70
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 25 mai 2017 - 02:51
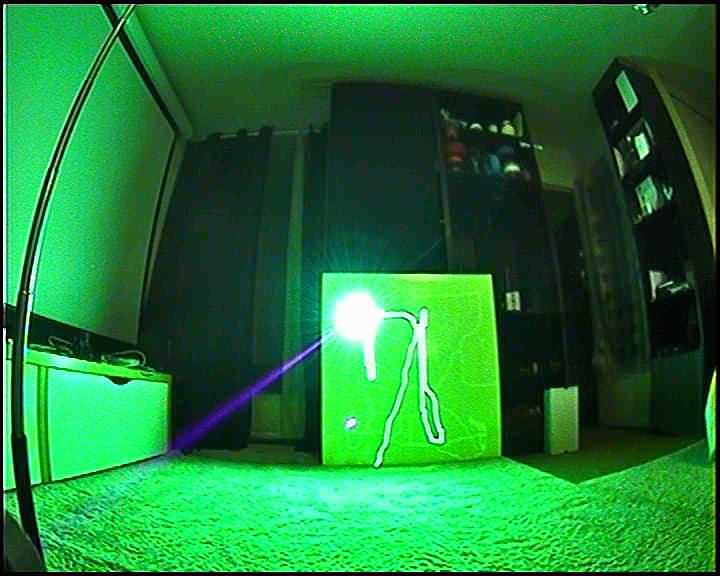
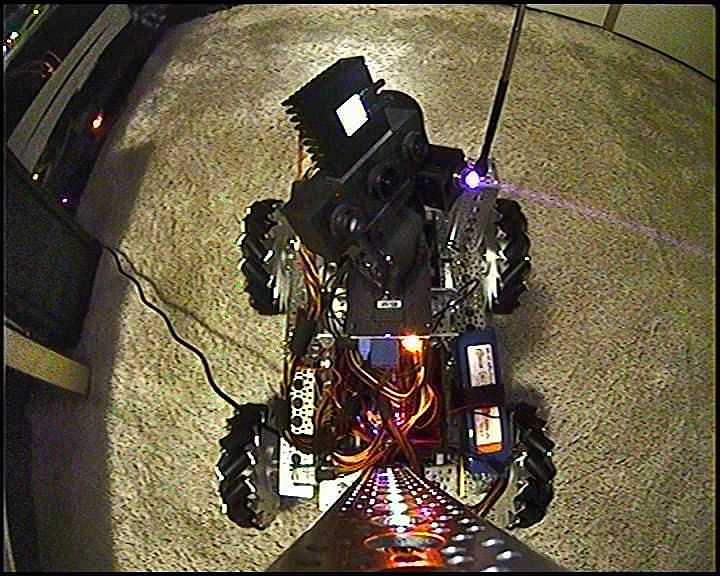
Hop j'ai mis le véritable laser sur le robot, il est maintenant armé lol.
Bien entendu l'allumage manuel de la diode n'est possible que par l'admin et elle se coupe automatiquement si je vise le robot lui même... car un pointage malencontreux sur du plastique noir fait quasi immédiatement une brulure dessus.
Je l'ai fabriqué à partir d'une diode laser démontée d'un bloc optique de graveur bluray 16x bdr-209 (j'ai acheté le sled seul pour éviter de gâcher un graveur entier) ce type de laser est habituellement monté par les amateurs sur les châssis de type CNC ou d'imprimante 3D pour en faire une graveuse ultra précise sur du bois/papier/cartons etc...
Caractéristique de la source laser Monomode/Singlemode / 900mW / 405nm / Divergence ultra faible de 0.1mrad / Optique en verre mono élément avec longue focale LFL "G7" la diode est pressée dans un cylindre de cuivre massif lui même fixé dans un refroidisseur en aluminium noir (calcul de divergence http://buildlog.net/cnc_laser/laser_calcs.htm - diamètre sortie de lentille = 5mm, diamètre à 35 mètres = 8.5mm !!)
La longeur d'onde violette 405nm n'est que partiellement visible par l’œil humain, c'est beau mais absorbée par beaucoup de surfaces donc ça chauffe fort, même à 50 mètre de distance on ressent comme une piqure (inoffensive sur la peau grâce aux réflexe mais attention aux yeux) ça fait des trous dans le plastique explose des ballons etc... -> Ne pas jouer avec ce genre de source laser sans que ce soit 100% maitrisé (lunettes de protection pour les yeux etc).
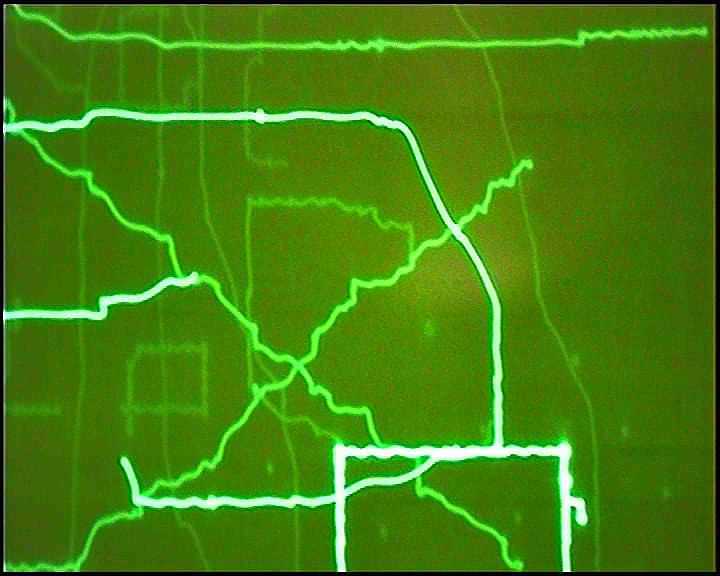
Cette longueur d'onde à la caractéristique de la lumière noire (UV proches) et donc produit un maximum de fluorescence selon la surface pointée. Jusqu’à plusieurs centaines de lumens...
Le but final de ce laser c'est que le robot aille de lui même écrire à la tourelle en police vectorielle le dernier message du chat du site ou n'importe quoi d'autre, automatiquement, sur un panneau photo-luminescent classe G d'un mètre carré.
Genre le robot se déplug de la station de charge, se déplace à proximité du paneau (pour éviter qu'une zone libre deviennent dangereuse car traversée par le rayon laser), écrit le message l'heure ou lé météo, et retourne se brancher tout seul. Fun:)
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)


#72
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 25 mai 2017 - 03:45
En fait je ne démarre pas le laser n'importe quand, il démarre via un bouton admin (rouge) tout comme la sirène.
Donc maintenant une fausse manip peut cramer l'oeil en plus de l'oreille lol
Si j’allume le laser, robot proche du paneau, quelqu'un pourrait le bouger pour dessiner dessus, ou viser un truc à la con et lui faire une marque de brulé...
Heureusement il est très difficile de démarrer un feu avec ce laser, faudrait un truc très très facilement inflammable. J'ai déjà fait un tout petit trou dans mon rideau noir avec ce type de laser.
Je peux ajouter une sécurité imparable dans le firmware (comme celle qui coupe le laser quand le robot se vise lui même) : le laser se coupe 1 seconde (ou moins) après un mouvement de la tête. Pas d'accumulation d’énergie = pas de risque de bruler qqchose.
Par contre ça reste toujours hyper dangereux si le rayon croise une pupille. A moins d'ajouter un capteur de présence qui interdit le laser si un être vivant se trouve en face!
Il est aussi possible quand y aura la localisation absolue de n'autoriser qu'une une zone de coordonnées proche du paneau lumineux (et coupure si le laser ne vise plus le panneau!)
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#73
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 25 mai 2017 - 04:11
Quand on tire dans une lampe à LED de plafond :
je ne suis même pas chez moi

c'est le modèle rendement A+ un bulbe transparent avec imitation de filament...
avec le laser 405nm ça fait une belle lumière Orange (rouge + vert) car une diode blanche à une fluorescence qui compte sur le bleu 450nm de la LED nue pour compléter le spectre et faire un beau blanc chaud.
Led blanche = led bleue + revetement fluorescent:)
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#74
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 25 mai 2017 - 05:25
'Aime bien ça :-)
J'ai une question : vu par ma caméra ( une webcam Logitech C920 ), le point d'impact d'un laser vert sur une surface quelconque est vu comme un point noir ( et s'il se déplace vite avec un miroir c’est vu comme un trait noir ) . Tu constate la même chose avec ta longueur d'onde ou pas ?
#75
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 25 mai 2017 - 05:40
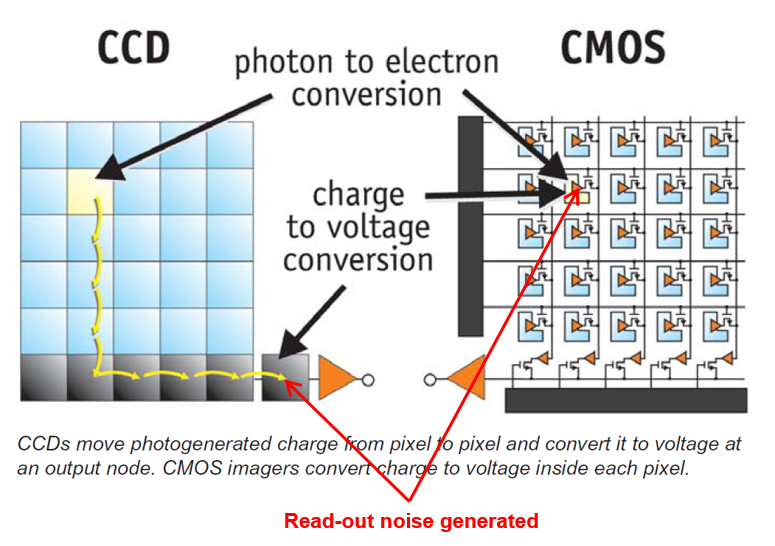
en fait rien a voir avec la longueur d'onde, c'est du a la saturation des pixels du capteurs.
En CCD ça sature blanc avec une ligne verticale -> fuite sur une ligne complète de pixels = Vertical Smear
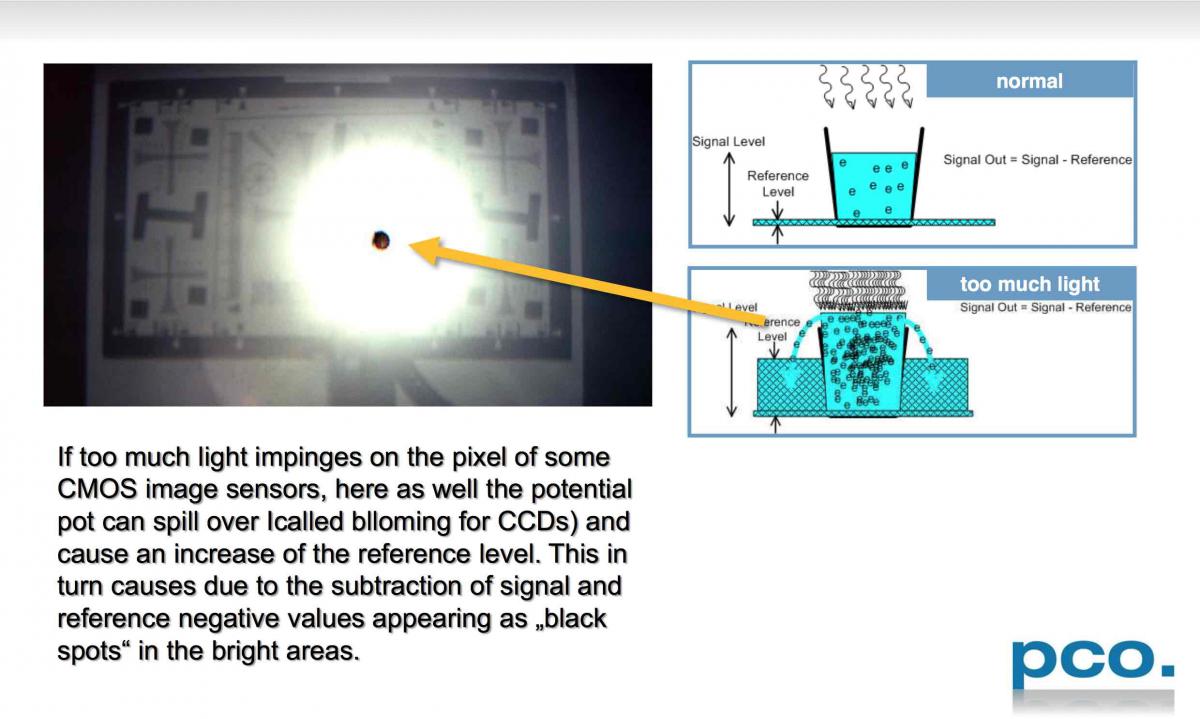
En CMOS ya aucune fuite sur les pixels adjacent mais la saturation fait une zone noir
comme quand tu filmes le soleil en CMOS ça fait une petite rondelle noir, et qu'en CCD ça fait une ligne verticale...
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#76
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 25 mai 2017 - 06:30


Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#78
cocothebo
-

- Membres
-
- 341 messages
Habitué
- Gender:Male
Posté 26 mai 2017 - 03:59
Salut,
Autant je salue le travail accomplie qui reste assez conséquent avec un résultat sympa, autant le coup du laser, moi j'y arrive pas. Ca reste plus que super dangereux, on est pas à l'abri d'un dysfonctionnement, ou que qqn prenne le contrôle à distance etc.
Bref me concernant un gros bémol sur le laser (dsl moi quand je vois ça je me dis pas "waouh trop cool on peut peter un ballon" mais plutôt "arf ça risque de mal finir") qui pourrait en plus montrer à des personnes moins prudente de faire pareil et de faire des blessés.
Par contre je réitère mes félicitations pour le reste du projet qui est plutôt bien réalisé.
#79
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 26 mai 2017 - 04:48
T'inquiète, les lasers sont mes "hand spinners" ou plutôt mes "fidget toy", quand je suis seul je joue souvent avec j'ai toute la collection des diodes lasers les plus intéressantes (comprendre les plus puissantes des monomodes et multimodes)
Et si c'est pas ton cas, ne pas reproduire !
Hackez moi (enfin essayez) : j'adore !
C'est un système électronique / physique dangereux (ou mortel en cas de fausse manip genre les hauts voltages combinés à de forts courants) : je kiffe !
Et si c'est pas ton cas, ne pas reproduire ! (bis)
- ashira aime ceci
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)



Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : Robot, Node.js, Serveur, Web, UHF, Faible latence, Radioamateur, PIC32, HTML5, H.264
![[Mecapi] Projets scientifiques et plans de communication - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)


0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

