- Pour le connecteur "fixed cruise speed", je pense qu'il s'agit de fixer la vitesse à un niveau très bas, pour les enfant par exemple, mais aucune certitude.
- il existe une multitude de contrôleurs de ce type, avec une multitude d'options, par exemple visualiser la tension sur un écran, mais celui-là est très basique et ne l'a pas.
- si j'impose le PWM à un maximum de 130, c'est parce que la vitesse avec cette valeur me parait suffisante. Je peux aller au delà, jusqu'à 255, mais le robot étant sur mon établi, c'est assez dangereux, à cause des vibrations.
- le filtre RC a R=4.7kg et C=10uF. Il est connecté à 2 contrôleurs. Un filtre pour les contrôleurs des roues à gauche, et un filtre pour les contrôleurs des roues à droite.
Quand le filtre n'est pas connecté à un contrôleur, il monte bien à 5V. Quand il est connecté, à cause de la résistance de charge, il chute à 3.5V.
Et là, étant connecté à 2 contrôleurs, il y a 2 résistances de charge en parallèle. Je me trompe ?
Je ne possède que 4 contrôleurs de ce type. Ils sont tous montés sur le robot et il est assez difficile de regarder les tensions à l'oscillo, dans ces conditions,
mais bon, je me faire violence . . . Je vais le faire, mais peut-être pas aujourd'hui.
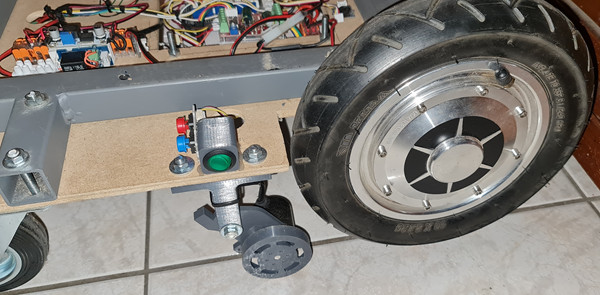
- je pense avoir bien compris l'idée du PID, pour imposer une vitesse. Evidemment, c'est une excellente idée, mais pas facile à mettre en œuvre avec le robot installé sur mon établi. Je vais freiner une roue avec une main gantée en regardant la fluctuation de l'intensité sur mon ampèremètre.
Voici mon programme :
- utiliser la manette des gaz pour modifier le PWM quand le robot tourne. Voir si cela fonctionne.
- revoir le filtre RC et essayer de monter plus haut que 3.5V.
- mettre en œuvre le PID.
Cela a l'air simple, dis comme ça, mais dans la vraie vie, à 70 ans, les problèmes s'accumulent, et à la maison, on est deux à les empiler . . .
Alors ce sera à petite vitesse, mais je vais y arriver.