

Oui effectivement
J ai payé le mien 55 eur.
Et la batterie semble être en forme.

411 réponses à ce sujet
#42

Oracid
-
- Modérateur
-

- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 25 avril 2022 - 08:28
Et la batterie semble être en forme.
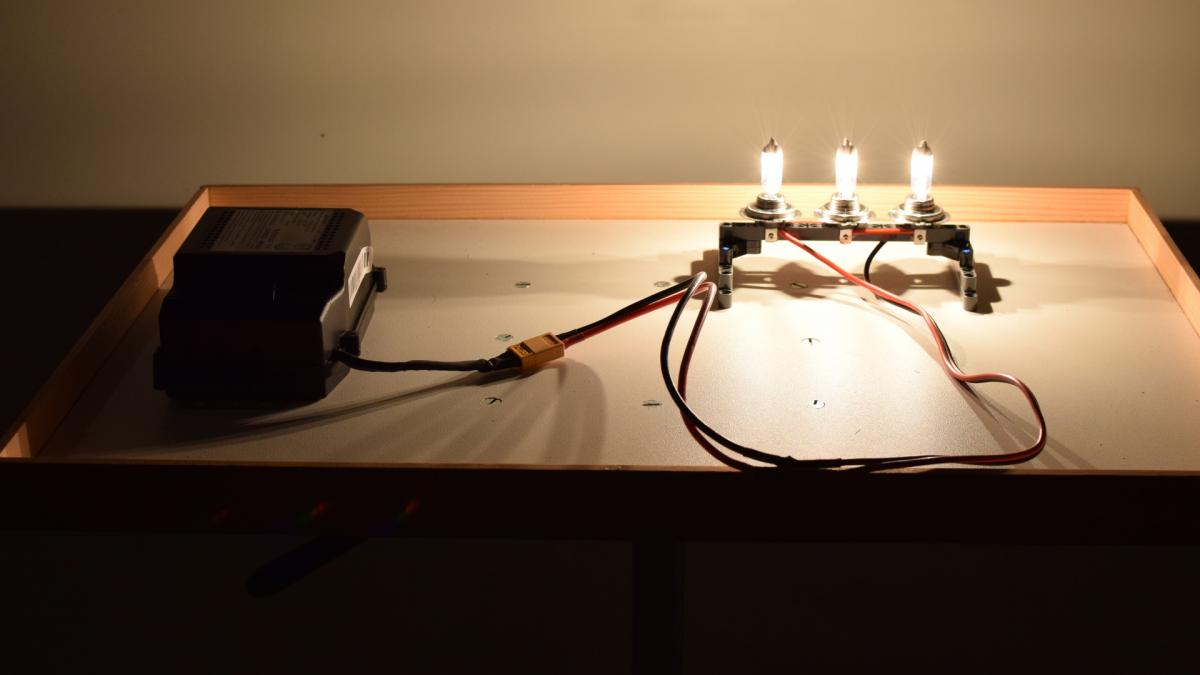
J'ai fait un testeur de batterie avec 3 lampes 12V, pour voiture, que j'ai acheté environ 5€ pièce, chez Norauto.
Attention, ne pas prendre de lampes pour intérieur de maison, cela ne fonctionne pas. Peut-être parce qu'elles sont prévues pour l'alternatif, je ne sais pas.
Sur 3 batteries, chargées à bloc, à 41,5V. Aucune n'a résisté plus de 3 minutes.
J'ai branché un voltmètre pendant la décharge, à 25V, l'électronique de la batterie coupe le jus.
https://www.norauto....egoryName=48200
Cliquez moi.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#43
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 13 mai 2022 - 06:47
J'ai reçu ma batterie 36V, 9.6Ah. Une sacrée bête ! Je l'ai eu à 100€. https://fr.aliexpres...ayAdapt=glo2fra
Bon, ça avance doucement. En plus, j'ai un énorme boulot dans le jardin et je pars en vacances bientôt.


Ma chaine YouTube : https://www.youtube..../oracid1/videos
#44
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 13 juin 2022 - 07:34
Voici une super vidéo de de Tom Stanton.
La conclusion du test est donnée à la toute fin de la vidéo.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#45
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 24 septembre 2022 - 01:04
J'ai testé un driver de moteur d'HoverBoard, en me basant sur la vidéo ci-dessous.
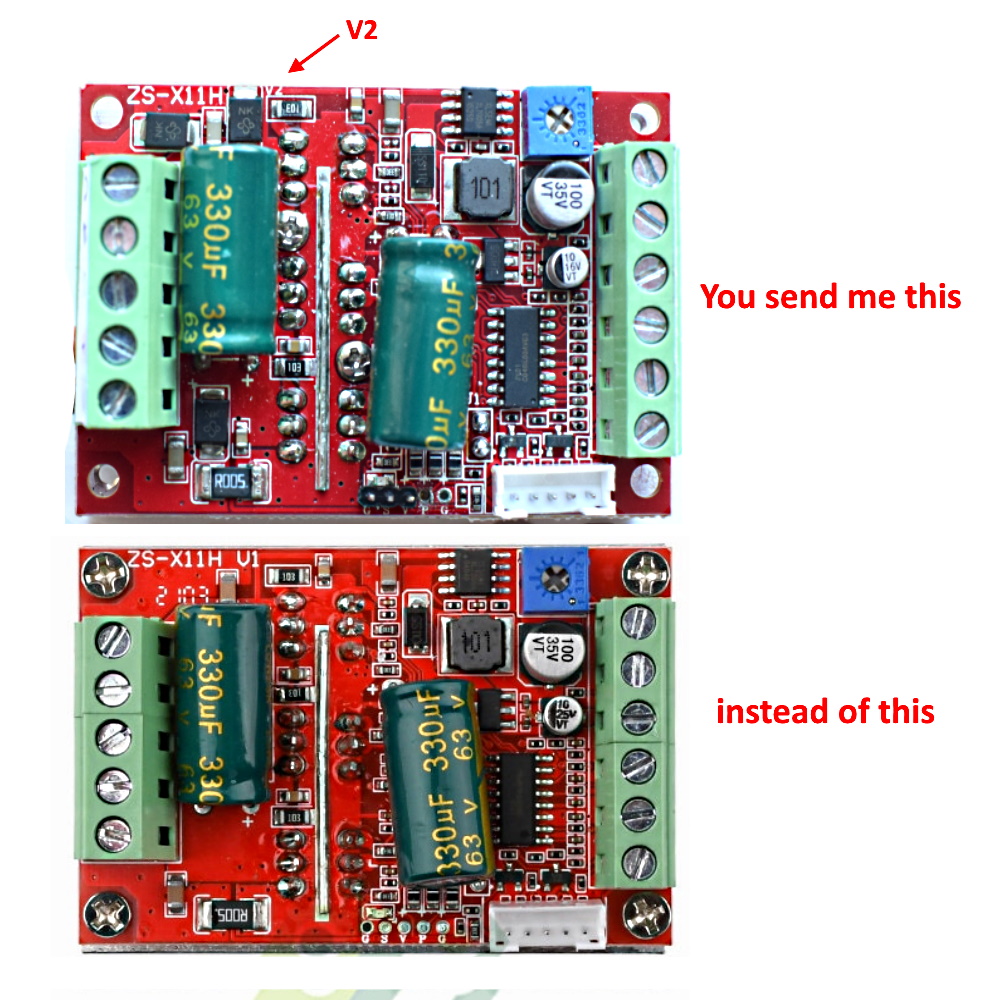
Malheureusement le driver utilisé est un ZS-X11HV1, alors que j'ai reçu la V2 qui a un connecteur (P) pour la mise en oeuvre du PWM qui n'est pas percé. J'ai percé en 1mm, mais j'ai fait du boudin . . .
Bref grosse galère ! Un malheur n'arrivant jamais seul, je me suis aperçu, après beaucoup de tests, que mon contrôleur universel ne fonctionnait plus. J'ai failli devenir chèvre. Bien entendu, j'en ai commandé un nouveau.
De plus, indépendamment, sans PWM, en manuel, le moteur ne fonctionne pas bien, impossible d'inverser le sens de rotation.
C'est peut-être moi le problème, néanmoins, j'ai réussi à faire tourner le moteur dans les 2 sens avec un autre driver, le ZS-X11F.
Du coup, je ne sais plus où j'en suis.
Voici l'image que j'ai envoyée à mon fournisseur sur Ali.
Dans la vidéo, Mad-EE n'utilise pas un potentiomètre, mais fait varier la tension de son alimentation de laboratoire de 0V à 5V. A 6'27".
Je me suis dit, alors, pourquoi ne pas transformer le signal PWM d'un Arduino en une tension continue variable.
La plupart du temps, les tutos sur le PWM font varier l'intensité lumineuse d'une LED avec l'instruction analogWrite().
En réalité, c'est du pseudo analogique. Cela fonctionne avec une LED, mais à l'oscilloscope on peut voir que le signal est bien carré et que la tension ne varie absolument pas.
L'idée serait d'utiliser un optocoupleur avec une LED (et sa résistance !) en entrée, et un transistor délivrant une tension variable de 0V à 5V, en sortie. https://fr.wikipedia...i/Photocoupleur
Je pense que ce composant devrait remplacer un potentiomètre. Cela pour éviter de passer en mode PWM, difficile à mettre en oeuvre sur les drivers.
Alors, si vous connaissez ce composant, ce serait super de m'en donner la référence, voir un lien.
Merci d'avance.
Ma chaine YouTube : https://www.youtube..../oracid1/videos

#47
pat92fr
-

- Membres
-
- 844 messages
Membre passionné
- Gender:Male
Posté 24 septembre 2022 - 01:31
Tu peux convertir le signal PWM en sortie de Arduino en une tension analogique en utilisant un filtre RC passe bas, dont il faut calculer la valeur de fréquence de coupure en fonction de ton besoin.
https://www.instruct...PWM-to-Voltage/
#48
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 24 septembre 2022 - 01:47
Tu peux convertir le signal PWM en sortie de Arduino en une tension analogique en utilisant un filtre RC passe bas, dont il faut calculer la valeur de fréquence de coupure en fonction de ton besoin.
Merci Patrick.
A dire vrai, j'avais un peu peur que l'on me propose cette solution . . .
Non, l'idée, c'est vraiment d'avoir un optocoupleur relié à mon driver, avec 2 fils. Les 2 autres fils étant reliés à l'Arduino.
Mais peut-être, n'est-ce pas une bonne idée ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#49
pat92fr
-
- Membres
-
- 844 messages
Membre passionné
- Gender:Male
Posté 24 septembre 2022 - 01:51
L'optocoupleur va reproduire le même signal, avec des niveaux de tension différents et une isolation des alimentations. Il ne va pas filtrer le signal carré pour le transformer en signal à composante continue. Certains opto ont une bande passante de plusieurs MHz... mais je n'ai peut etre pas compris ton montage.
#50
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 24 septembre 2022 - 03:36
Il ne va pas filtrer le signal carré pour le transformer en signal à composante continue.
Ah, zut ! Je pensais que le transistor de sortie amplifiait la luminosité de la LED.
Bon, ok ! Je vais essayer de faire ce filtre.
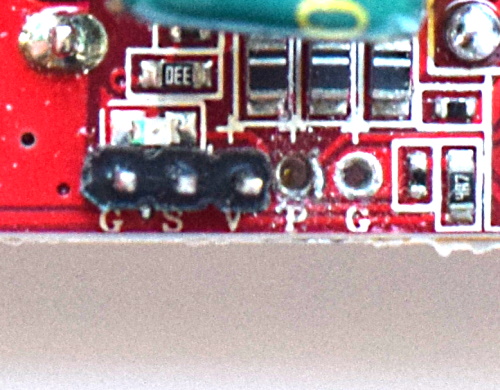
Pour Melmet. Voici une image très agrandi du point P.
Pourquoi le fabricant n'a pas mis un connecteur à 5 pins au lieu de 3 pins, c'est un mystère. D'autant que le point P est celui qui permet le PWM.
A l'origine, ce n'était même pas percé. C'est moi qui ait percé en 1mm, mais je crois que la pastille, en dessous, s'est décollé.
Peut-être, même, que j'ai abimé une piste. C'est très serré, à cet endroit.
Malheureusement, je ne peux pas faire de photo du dessous, car il y a un gros radiateur qui est collé.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#51
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 24 septembre 2022 - 06:24
Bon, j'ai fait un filtre vite fait sur une Breadbord avec une résistance d'environ 5k et un condensateur qui indique 0.73K
Et bien, cela fonctionne très bien sur la pin 5, PWM à 980Hz.
Demain, j'essayerai de trouver des valeurs plus adaptés dans mes tiroirs.
Le problème, c'est que je n'ai plus de multimètre.
Merci Patrick.
- pat92fr aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#52
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 25 septembre 2022 - 07:46
J'ai trouvé cette vidéo qui explique très bien l'utilisation du filtre passe-bas pour éliminer les oscillations et ne garder que la résultante continue moyenne d'un signal oscillant.
Pour la démonstration, ici, Hervé Discours utilise un simulateur en ligne, Falstad. https://falstad.com/.../circuitjs.html
Merci encore, Patrick.
La question que je me pose est, pourquoi les drivers de moteur sont-ils aussi complexes quand il faut utiliser du PWM, alors qu'il suffit d'utiliser un filtre passe-bas ?
En supposant qu'à 99%, les signaux PWM utilisés sont en 5V.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#53
pat92fr
-
- Membres
-
- 844 messages
Membre passionné
- Gender:Male
Posté 25 septembre 2022 - 02:24
L'inertie du moteur va jouer le rôle de passe bas. Une fréquence de PWM de 20 à 100KHz est souvent utilisée, sans aucun filtrage.
Tu pourrais brancher un moteur miniature directement à deux GPIO, et contrôler le sens et la vitesse en PWM, mais tu risques d'endommager ton Arduino.
En fait, c'est surtout une question de courant et de dissipation thermique. Une GPIO peut faire passer un courant faible (ex.: 20mA) et elle risque de mal supporter ce type de charge (inductive).
Un driver, c'est avant tout 4 transistors montés en H. Tu peux fabriquer cet étage de puissance toi même. C'est assez simple.
La partie un peu compliquée, c'est celle qui doit piloter ces transistors (leur grille typiquement) avec la bonne tension et le bon courant.
Il existe tout un tas d'IC pour cela qui simplifient bien le design des cartes (pompe de charge intégrée, réglage du courant, du taux de montée/descente...).
- Mike118 aime ceci
#54
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 25 septembre 2022 - 06:39
Tu peux fabriquer cet étage de puissance toi même. C'est assez simple.
Je me suis mal fait comprendre.
Le driver, en lui-même, est assez complexe, mais l'utilisation manuel avec un potentiomètre est relativement facile à mettre en oeuvre.
Par contre, dès que l'on parle de PWM, là, ça devient très compliqué à mettre en oeuvre.
Mais bon, c'est peut-être moi qui ait abimé le driver. J'en ai commandé 2 autres dans 2 boutiques différentes, en espérant qu'une m'enverra la V1.
Ceci dit, j'ai essayé une nouvelle fois mon filtre passe bas, ça ne fonctionne plus. 
J'ai essayé comme indiqué sur ton lien, avec une résistance de 3.9K et un condensateur de 100nF.
J'obtiens un espèce de triangle avec les bords arrondis. J'ai essayé d'autres valeurs, rien à faire
J'ai reçu mon nouveau multimètre, un dimanche ! Bon, demain est un autre jour.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#55
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 26 septembre 2022 - 01:34
ça marche !
Pourquoi, je ne sais pas vraiment. J'ai simplement interverti les 2 sondes.
Une sonde montre le signal PWM, l'autre montre le signal en sortie du filtre passe-bas. J'utilise la pin 5 du Nano, donc à 980Hz.
Avec une résistance de 4.7K et une capacité de 100n, je n'ai aucune oscillation et le signal va bien de 0V à 5V. Un vrai miracle !
Ce sont quasiment les même valeurs proposées dans le lien de Patrick, plus haut.
Par contre, le signal carré se balade entre -5V et +5V. Bizarre . . .
Là, j'utilise mon nouvel oscilloscope SIGLENT SDS1104X-E. C'est un 100Mhz, 4 voies. https://jeulin.com/j..._fr/295267.html
Le problème, c'est que je ne sais pas l'utiliser. Il va falloir que j'investisse un minimum de temps dans quelques vidéos sur YouTube.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#57
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 26 septembre 2022 - 04:28
4 voies 100Mhz, wow pourquoi ce choix?
Et bien, j'achète un oscilloscope tous les 40 ans. Alors, je ne voulais pas me tromper.
De plus, si je voulais voir les signaux sur les 3 voies d'un moteur Brushless, il fallait au moins ça.
Et puis, qui peut le plus, peut le moins.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#58
Sandro
-

- Modérateur
-
- 1â¯346 messages
Membre chevronné
- Gender:Male
Posté 26 septembre 2022 - 06:52
Tout dépend de ce qu'on veut faire. Avec 2 voies, on peut faire beaucoup de choses, mais pas tout. Quelques exemples nécessitant plus que 2 voies :
- observer un signal I2C (2 fils) avec trigger sur un signal analogique (par exemple pour vérifier que le capteur I2C a bien détecté le signal et l'interprête correctement, ou alors pour calculer le delai entre la reception d'un message via I2C et la génération d'un signal par l'escalave I2C)
- étudier en détail un moteur DC avec un driver en double PWM : on a besoin de 2 entrées pour les PWM, et un fil pour la tension de sortie
- étudier un asservicement en vitesse d'un moteur avec encodeur optique : 2 entrées pour l'encodeur, et une pour le PWM qui commande le moteur
- étudier un moteur brushless : là on peut utiliser un paquet de voies potentiellement (3 voies, 3 PWM, et pour certains 3 capteurs hall)
- étudier un circuit logique (par exemple une porte ET ou OU) : 2 entrées et 1 sortie -> 3 voies
- ...
Pour la fréquence, tout dépend de ce qu'on veut observer :
- pour travailler sur du son, avec quelques MHz on est large
- pour regarder la qualité d'un signal I2C standard (100kb/s), il est utile d'avoir 10MHz de bande passante sur l'oscilloscope (il faut beaucoup d'harmoniques pour bien reconstruire un créneau)
- pour de l'I2C rapide (400kb/s) voir très rapide (1Mb/s), c'est bien d'être pas loin des 100MHz si on veut apprécier la qualité du signal
- pour de l'uart ("serial" d'arduino par exemple), on peut monter à quelques Mb/s, donc là encore, il faut quelques dizaines de MHz pour voir le signal, et de l'ordre de 100MHz pour pouvoir voir la qualité du signal de quelques Mb/s
- si on veut observer des signaux d'horloge, 100MHz est souvent le minimum (par exemple l'horloge de l'arduino uno est à 16MHz)
- pour certaines applications plus exotiques (radio, USB, ethernet, ...) même 100MHz peuvent être insuffisants
- Oracid aime ceci
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
#59
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 26 septembre 2022 - 08:06
Avec 2 voies, on peut faire beaucoup de choses, mais pas tout.
Merci Sandro. Tes remarques me confortent dans mon choix.
J'ai testé le PWM sur la pin 3 en 490Hz. Puis j'ai essayé de trouver des valeur de R et C pour les 2 fréquences, 490Hz et 980Hz.
Avec R=50K et C=1u, on obtient une bonne tension continue sans oscillations parasites et avec une réactivité vraiment très bonne.
Mais si on veut avoir quelque chose de parfait, il suffit d'avoir R=100K et C=1u. On perd très légèrement en tension, mais c'est dérisoire.
Maintenant, il ne me reste plus qu'à faire un test avec ce montage à la place du potentiomètre du driver pour faire varier la vitesse de mon moteur.
Je vais tenter un montage directement sur le connecteur Dupont avec des petits composants.
Voici une vidéo qui expose très bien certains problèmes liés au filtre passe-bas. Les choses ne sont pas si simples et j'ai vu plusieurs vidéos qui allaient très loin dans la complexité.
Je ne dirais qu'une chose, "Vivons heureux, vivons dans l'ignorance . . ."
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#60
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 27 septembre 2022 - 07:31
J'ai relié mon filtre RC passe-bas en lieu et place du potentiomètre du driver. Cela fonctionne très bien !
Petit problème, la charge.
Quand je tourne le potentiomètre relié à l'Arduino pour augmenter la vitesse, avec R=100K, la tension de commande arrive au maximum à 500mV, au lieu de 5V.
En changeant pour R=46K, je monte à 1V, et le moteur tourne plus vite.
Je savais que j'allais me cogner au problème de la charge, voir la vidéo, ici à 18'43", https://www.robot-ma...board/?p=116772
Question :
- jusqu'où puis-je descendre la valeur de R, sans cramer la sortie de l'Arduino ?
- comment mesurer la valeur de la charge (impédance ?) de l'entrée potentiomètre du driver ?
Merci d'avance pour votre aide.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Répondre à ce sujet







1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

