

 )
)Je mets tout en vrac, j'ai peu de temps




Membre passionné

Posté 17 mai 2012 - 08:20

Staff Robot Maker

Posté 17 mai 2012 - 08:25
Petite précision: sur la première photo, le "T" a été retiré afin de changer les récepteurs IR collés dessus parce que je les ai cramé
 juste dommage pour les récepteurs ... mais hum, tu as fais comment pour les cramer ? ça peut être bon à savoir pour ne pas faire la même chose !
juste dommage pour les récepteurs ... mais hum, tu as fais comment pour les cramer ? ça peut être bon à savoir pour ne pas faire la même chose !
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 17 mai 2012 - 08:30
Jolies photos c'est sympas de partager

Membre passionné
Posté 20 mai 2012 - 06:14
Habitué

Posté 22 mai 2012 - 08:36
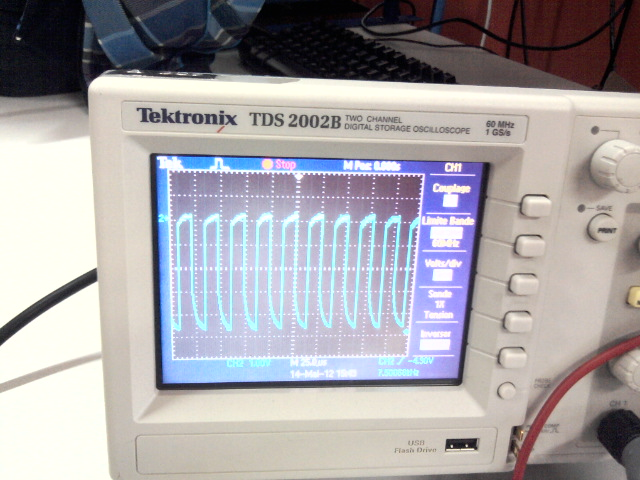
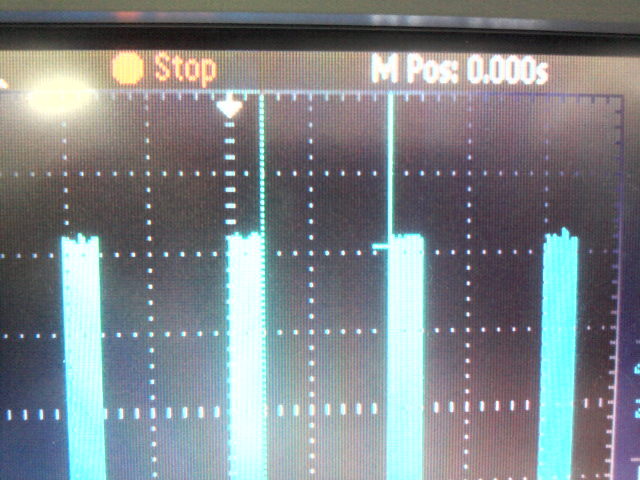
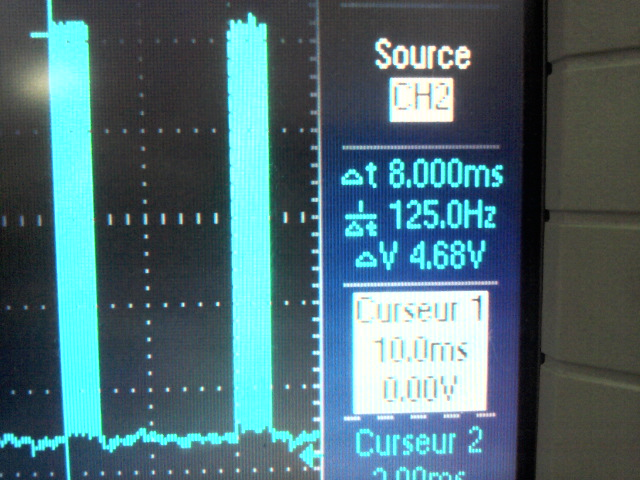
tu confirmes bleu : le signal de sortie du filtre ?petite vidéo du filtre basé sur un monostable pour vous montrer que ça avance. en jaune le signal capteur, en bleu le signal de sortie du filtre.Comme vous le verrez sur la vidéo, des perturbations de l'ordre de 100ms apparaissent au bout d'un certain temps en sortie du capteur, je ne sais pas pourquoi...
edit: l'envoi a échoué, je mets ça sur Youtube: http://youtu.be/TdbSb4M23KY
Membre passionné
Posté 22 mai 2012 - 09:39
tu confirmes bleu : le signal de sortie du filtre ?

Membre passionné
Posté 22 mai 2012 - 10:40
, corrections du programme si besoin, si tout marche bien je réparerai le module de suivi de ligne et je coderai cette partie mais c'est secondaire, mise en forme du compte rendu (le contenu y est mais on a du mal à faire notre plan car toutes les partie s'entrecroisent: la balise dépend du robot, le robot dépend de la balise  ), création de la présentation (diapos etc.)... Si on ne fait pas de conneries (ce qui tiendrait du miracle ), on devrait pouvoir vous donner des videos et nous mettre à bosser notre oral
), création de la présentation (diapos etc.)... Si on ne fait pas de conneries (ce qui tiendrait du miracle ), on devrait pouvoir vous donner des videos et nous mettre à bosser notre oral  )
)
Membre passionné
Posté 22 mai 2012 - 11:11
Habitué
Posté 23 mai 2012 - 12:20
Membre passionné
Posté 23 mai 2012 - 12:27
Habitué
Posté 23 mai 2012 - 01:53
Membre passionné
Posté 23 mai 2012 - 03:22
Membre passionné
Posté 26 mai 2012 - 03:55
 -ce message est également un message d'excuses aux membres de mon groupe )
-ce message est également un message d'excuses aux membres de mon groupe )int E2 = 6; //pin Enable moteur 1
int M2 = 7; //pin PWM moteur 1
int E1 = 5; //pin Enable moteur 1
int M1 = 4; //pin PWM moteur 1
int T_gauche=4;
int T_droite=7;
//============================================================================================================================================================
void setup()
{
pinMode(M1, OUTPUT); //définit le pin moteur 1 en sortie
pinMode(M2, OUTPUT); //définit le pin moteur 2 en sortie
pinMode(T_gauche, INPUT);
pinMode(T_droite, INPUT);
}
void loop() //boucle principale (comportement du robot)
{
int val_T_gauche=digitalRead(T_gauche);
int val_T_droite=digitalRead(T_droite);
if (val_T_gauche == 0) {
if (val_T_droite == 0) {
gauche(110);
}
else if (val_T_droite == 1) {
droite(900);
}
}
else if (val_T_gauche == 1) {
if (val_T_droite == 0) {
gauche(900);
}
else if (val_T_droite == 1) {
avancer(110);
}
}
}
//============================================================================================================================================================
void avancer(int vitesse) { //fonction avancer: les deux moteurs à la vitesse donnée dans le sens avant
digitalWrite(M1, HIGH);
digitalWrite(M2, HIGH);
analogWrite(E1, vitesse);
analogWrite(E2, vitesse);
}
void droite(int vitesse) { //fonction tourner à droite: le moteur droit à la vitesse donnée dans le sens avant et l'autre dans le sens arriere
analogWrite (E1,vitesse);
digitalWrite(M2,LOW);
analogWrite (E2,vitesse);
digitalWrite(M1,HIGH);
}
void gauche(int vitesse) { //fonction tourner à gauche: le moteur gauche à la vitesse donnée dans le sens avant et l'autre dans le sens arriere
analogWrite (E1,vitesse);
digitalWrite(M1,LOW);
analogWrite (E2,vitesse);
digitalWrite(M2,HIGH);
}
void arret() { //fonction arret: les deux moteurs en arret
digitalWrite(E1, LOW);
digitalWrite(E2, LOW);
}

Membre chevronné

Posté 26 mai 2012 - 05:17
Esprit
*Rêve d'en caser un dans un robot*
Membre passionné
Posté 26 mai 2012 - 05:18
Membre chevronné
Posté 26 mai 2012 - 05:44

Esprit
*Rêve d'en caser un dans un robot*









0 members, 0 guests, 0 anonymous users


