
Salut, je voyais le topic gonfler sans savoir ce qu'il se passait...
Sympa comme projet, un sacré défi d'intégration.
Pour gagner de la place pourquoi ne pas partir sur un clone de arduino pro mini? type ceux là, y en a un qui fait 18*33 mm ! Il est suffisemmant puissant pour tout gérer (PWM, signaux de servos, et même communication entre modules) et vous faites passer un nappe souple dans l'articulation du milieu pour piloter les servos et les moteurs de l'autre coté.
ou n'importe quelle carte à base de ATMega328... On doit pouvoir trouver ces chip à 3€ (au pire les 168 sont aussi puissants mais avec moins de mémoire).

330 réponses à ce sujet
#321

Hexa Emails
-

- Membres
-

- 439 messages
Habitué
- Gender:Male
Posté 07 juillet 2012 - 08:19
#322
Mike118
-

- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 07 juillet 2012 - 02:45
Salut, je voyais le topic gonfler sans savoir ce qu'il se passait...
Sympa comme projet, un sacré défi d'intégration.
Pour gagner de la place pourquoi ne pas partir sur un clone de arduino pro mini? type ceux là, y en a un qui fait 18*33 mm ! Il est suffisemmant puissant pour tout gérer (PWM, signaux de servos, et même communication entre modules) et vous faites passer un nappe souple dans l'articulation du milieu pour piloter les servos et les moteurs de l'autre coté.
ou n'importe quelle carte à base de ATMega328... On doit pouvoir trouver ces chip à 3 (au pire les 168 sont aussi puissants mais avec moins de mémoire).
Bienvenu à toi dans cette petite aventure
 Je trouve ton idée intéressante ! je ne vois pas pourquoi on y avais pas pensé ? x) peut être à cause du prix ...
Je trouve ton idée intéressante ! je ne vois pas pourquoi on y avais pas pensé ? x) peut être à cause du prix ... En tout cas c'est à discuter
moi ce n'est pas vraiment mon domaine mais j'aimerais bien un jour que ça le soit je vais bientôt passer la commande pour ma première arduino ^^ J'espère que tu vas continuer de nous suivre dans cette aventure ( si tu veux je fais un résumé par citation page par page de nos avancés en ce moment et donc là j'ai résumé les 3 premières pages de cette discussion ) à bientôt j'espère
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#323
Francky
-
- Membres
-
- 967 messages
Membre passionné
- Gender:Male
Posté 08 juillet 2012 - 09:16
C'est sûr c'est plus petit x') mais bon tiens nous au courant quand même stp, ça peut intéresser du monde ^^Je vais essayer de bidouiller mon servo moteur tout cassé pour remplacer le potentiomètre par la roue codeuse et essayer d'y faire tenir l'optocoupleur mais je pense que ce sera trop délicat pour les microservos...
Faut vraiment que j'apprenne le C XD En tous cas c'est sûr il a l'air pas mal ^^La raison pour laquelle ça me semble pas mal c'est surtout parce que il n'y a pas besoin d'acheter un programmateur hors de prix ou de galérer pour le programmer (du moment qu'on a une Arduino sous la main en tout cas)
Au pire t'embêtes pas à chercher un pic. C'est juste que c'est à vous de vous coller à la progra !
 (de toutes je suis pas très efficace, ça avancera plus vite x')). Je m'amuserai sûrement à essayer de reproduire le même comportement avec un pic que j'ai : un 16f877a. ^^ (mouahahaha encore un cours qu'il faut que je lise :'D).
(de toutes je suis pas très efficace, ça avancera plus vite x')). Je m'amuserai sûrement à essayer de reproduire le même comportement avec un pic que j'ai : un 16f877a. ^^ (mouahahaha encore un cours qu'il faut que je lise :'D).Pour l'I²C, si j'ai bien suivi ce sont 2 pins spécifiques.EDIT 2: pour les interruptions, il a une pin External interrupt et 6 Pin Change Interrupt... je sais pas si je peux adapter mon code d'asservissement pour les Pin Change interrupt mais je vais essayer... D'ailleurs je comprends pas tout à ces histoires, si Francky pouvait m'éclairer... (une piste ici)
En plus je crois que l'I²C a aussi besoin des interruptions donc on arrive à cour de pin interrupt >< bref c'est un peu le bordel, je vais me coucher et je verrai ça demain
Et pour le pin change, j'ai lu ce que tu m'as donné et je pense peut être savoir ce que c'est. En fait, ça me fait penser au fonctionnement du port B sur le pic 16f84a (c'est un exemple). Pour être précis, c'est un port de 8 bits. Le 1er, RB0, peut être configuré en interruption externe. Les 7 autres (Rb1 à 7) peut être également configuré en interruption extérieure. Sauf que, comme dans ce qui est expliqué sur ton site (si j'ai bien compris), il faut trouver la source d'interruption soi même par le programme (le moyen que j'ai trouvé est de lire au début du sous programme d'interruption la valeur du port mais ça présente pas mal d'inconvénients. Je pense qu'il y a mieux mais je n'ai pas vraiment ni cherché ni trouvé ^^).
17 cm pour le module complet c'est vraiment pas mal ! En tous cas il est bien fait ton dessinun demi module ferait donc environ 5cm de coté 6cm de longueur et 3cm de largueur ( largeur non représenté sur mon dessin en 2D ) la liaison inter module devant faire au minimume 5cm = dimension du coté on se retrouve avec un 17cm de longueur total pour le module complet qu'en pensez vous ?
Comme la dit Mike, bienvenue dans notre rafiotPour gagner de la place pourquoi ne pas partir sur un clone de arduino pro mini? type ceux là, y en a un qui fait 18*33 mm ! Il est suffisemmant puissant pour tout gérer (PWM, signaux de servos, et même communication entre modules) et vous faites passer un nappe souple dans l'articulation du milieu pour piloter les servos et les moteurs de l'autre coté.
ou n'importe quelle carte à base de ATMega328... On doit pouvoir trouver ces chip à 3 (au pire les 168 sont aussi puissants mais avec moins de mémoire).
Merci pour le lien, c'est effectivement très intéressant
Par contre, j'ai juste une question qui va certainement vous paraître conne : comment on les programme ? "^^
#324
Mike118
-
- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 08 juillet 2012 - 09:39
Bon je propose de faire un estimation du poid total du robot pour faire un vérification du couple nécessaire :
4 piles AAA + boitier + fils+ fixation : 60g
4 servo-moteurs 9g + fils + fixation : 50g
électronique divers + plaque à souder + fixation : 60g
carapace en carton ou en plastique d'épaisseur 1mm : 40g
flexibilité ( = marge ) : 90g
total : 300g ( valeur maximal limite mais réellement estimé à 210g )
poid d'un demi module 150g
Dimensions :
un demi module
5cm de coté
6cm de longueur
3cm de largueur
liaison inter-demi module : 5cm (=dimension du coté)
longueur totale : 17cm pour le module complet
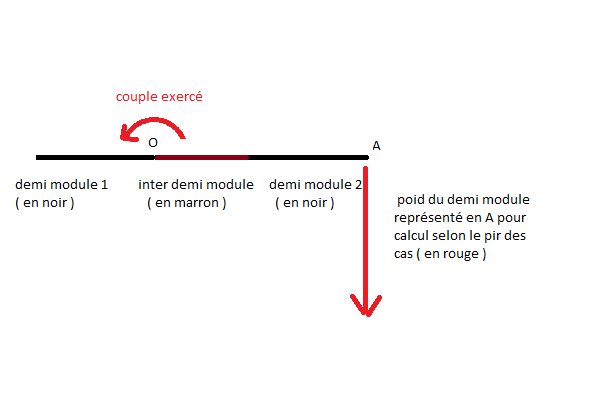
calcul du couple pour le moteur du milieu d'un demi module: de centre placé en O.
Cas extrême : le demi module doit soulever l'autre demi module assimilé à une masse ponctuelle de 150g situé en A à une distance de 11 cm de O ( longueur du demi module + liaison intermodule ) dans la position la plus défavorable ( action de la pesenteur orthogonale à la droite OA )
ce qui donne un couple de 1650g.cm = 1,65kg.cm = 16,5N.cm
Si je me souviens bien : les micro servo 9g font environ 1,8kg.cm donc Bingo !
Surtout que ce calcul est fait dans le pire des cas avec des approximations désaventageuse,( masse ponctuelle ) et avec une masse max de 300g en comptant une marge de 90g et les autres valeurs de masse légèrement sur-dimensionnées à chaque fois du coup le couple réel doit d'avantage s'approcher de 0,7 ou 0,8 kg.cm si on fait un module de 200g...
à ce moment là il serait même possible de mettre deux modules en série
Bon je sais j'aurais du faire un dessin ...
du coup le voici
(Me reprendre si je n'ai pas été assez clair au si quelque chose vous échappe, si je me suis trompé dans le raisonnement ou dans une donnée )
4 piles AAA + boitier + fils+ fixation : 60g
4 servo-moteurs 9g + fils + fixation : 50g
électronique divers + plaque à souder + fixation : 60g
carapace en carton ou en plastique d'épaisseur 1mm : 40g
flexibilité ( = marge ) : 90g
total : 300g ( valeur maximal limite mais réellement estimé à 210g )
poid d'un demi module 150g
Dimensions :
un demi module
5cm de coté
6cm de longueur
3cm de largueur
liaison inter-demi module : 5cm (=dimension du coté)
longueur totale : 17cm pour le module complet
calcul du couple pour le moteur du milieu d'un demi module: de centre placé en O.
Cas extrême : le demi module doit soulever l'autre demi module assimilé à une masse ponctuelle de 150g situé en A à une distance de 11 cm de O ( longueur du demi module + liaison intermodule ) dans la position la plus défavorable ( action de la pesenteur orthogonale à la droite OA )
ce qui donne un couple de 1650g.cm = 1,65kg.cm = 16,5N.cm
Si je me souviens bien : les micro servo 9g font environ 1,8kg.cm
donc Bingo ! Surtout que ce calcul est fait dans le pire des cas avec des approximations désaventageuse,( masse ponctuelle ) et avec une masse max de 300g en comptant une marge de 90g et les autres valeurs de masse légèrement sur-dimensionnées à chaque fois du coup le couple réel doit d'avantage s'approcher de 0,7 ou 0,8 kg.cm si on fait un module de 200g...
à ce moment là il serait même possible de mettre deux modules en série
Bon je sais j'aurais du faire un dessin ...
du coup le voici
(Me reprendre si je n'ai pas été assez clair au si quelque chose vous échappe, si je me suis trompé dans le raisonnement ou dans une donnée )
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!

#326
Mike118
-
- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 10 juillet 2012 - 06:36
Ca me paraît pas mal. Enfin ça me semble un peu bizarre qu'il puisse soulever un second module. Mais si tu ne t'es pas trompé c'est vachement cool.
Bon j'aimerai bien qu'on passe à un peu plus de concret ! ^^
On va supposer que la structure est la suivante :
2 pics dont 1 pic maitre et 1 pic esclave.
Le pic maitre génére les position successive que les 4 moteurs du robot doivent prendre, il contrôle les servo et envoit les ordre ( sous forme de valeurs ) au pic esclave. Le pic esclave contrôle les deux moteurs cc.
1: générer un algorithme de communication unidirectionnel du pic maître vers le pic esclave. ( pic maître et esclave )
2: générer un algorithme qui cré les positions successives ( pic maître )
3: associer la commande adéquate pour les servo à l'algo des positions successive ( pic maître )
4: générer l'algorithme de double asservissement par le pic esclave des moteurs cc ( pic esclave)
5: associer la commande des deux asservissement à l'algo de communication ( pic esclave )
Perso je planche sur le 2.
Je sais que swolf a peut être déjà fait le 4 ou un équivalent qu'il faudra peut être adapter.
francky tu te colle au 1 ? ^^
Sinon est ce que l'un de vous deux possède ces micro servo ? Combien ? Peut il faire des tests ?
1 : tester le couple pour vérifier les données constructeurs , 4,8V 6V voir même 7,2 V ?
2 : vérifier le poids
3 : Vérifier que le servo est bien modifiable en moteur cc en enlevant l'électronique + la butée. Vérifier le poids
4 : vérifier si on peut implémenter à l'interieur un codeur inrémental minuscule : une feuille de papier transparente sur laquelle on a imprimer les traits et un petit U contentant un del et un photo transistor ( je me rappel plus du non )
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#327
Francky
-
- Membres
-
- 967 messages
Membre passionné
- Gender:Male
Posté 10 juillet 2012 - 06:51
Je veux bien mais ça veut dire qu'il faut que j'essaie le C xD Enfin bon je dois pouvoir trouver des exemples de codes pour l'I²C sur internet x')francky tu te colle au 1 ? ^^
Comme je l'avais déjà dit je possède un micro servo (ce n'est pas le même mais c'est grosso modo pareil). Franchement je peux te dire que pour le 3 et le 4 ça sera hard. Le servo est très petit et pour le démonter ça ne doit pas être une mince affaire (je ne testerai pas sur le mien : j'en ai qu'un et j'y tiens x')).Sinon est ce que l'un de vous deux possède ces micro servo ? Combien ? Peut il faire des tests ?
1 : tester le couple pour vérifier les données constructeurs , 4,8V 6V voir même 7,2 V ?
2 : vérifier le poids
3 : Vérifier que le servo est bien modifiable en moteur cc en enlevant l'électronique + la butée. Vérifier le poids
4 : vérifier si on peut implémenter à l'interieur un codeur inrémental minuscule : une feuille de papier transparente sur laquelle on a imprimer les traits et un petit U contentant un del et un photo transistor ( je me rappel plus du non )
#328
Mike118
-
- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 10 juillet 2012 - 07:06
Je veux bien mais ça veut dire qu'il faut que j'essaie le C xD Enfin bon je dois pouvoir trouver des exemples de codes pour l'I²C sur internet x')
j'ai dis : suppose que c'est un pic ^^ et puis aussi j'ai juste parlé d'algorithmique pas de la programmation ^^ l'algo reste grosso modo valable quelque soit le langage que tu utilise derrière ^^
Comme je l'avais déjà dit je possède un micro servo (ce n'est pas le même mais c'est grosso modo pareil). Franchement je peux te dire que pour le 3 et le 4 ça sera hard. Le servo est très petit et pour le démonter ça ne doit pas être une mince affaire (je ne testerai pas sur le mien : j'en ai qu'un et j'y tiens x')).
ok
et puis si c'est pas le même ça ne sera pas concluant comme test ^^ Par contre si tu veux bien en commander... ^^
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#329
swolf
-

- Membres
-
- 626 messages
Membre passionné
- Gender:Male
Posté 10 juillet 2012 - 07:18
pour la roue codeuse on est pas obligé de la mettre dans le servo, on peut très bien la mettre à lextérieur, sur l'axe de sortie par exemple
Notre blog, à FJprod et moi: http://2froblog.wordpress.com/
#330
Mike118
-
- Administrateur
-
- 10â¯341 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 10 juillet 2012 - 07:21
pour la roue codeuse on est pas obligé de la mettre dans le servo, on peut très bien la mettre à l’extérieur, sur l'axe de sortie par exemple
en effet mais ça aurait été intéressant de voir si c'est possible ^^ surtout qu'il y a la place du potentiomètre qu'on aura retiré. Par contre il est évident que si c'est trop complexe on le fera à l'extérieur, sur l'axe de sortie
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#331
Francky
-
- Membres
-
- 967 messages
Membre passionné
- Gender:Male
Posté 10 juillet 2012 - 08:00
J'avais mal lu. Je vais réfléchir mais franchement je vois pas trop comment faire l'algo d'un protocole existant x')j'ai dis : suppose que c'est un pic ^^ et puis aussi j'ai juste parlé d'algorithmique pas de la programmation ^^ l'algo reste grosso modo valable quelque soit le langage que tu utilise derrière ^^
Ca paraît plus sûr x')en effet mais ça aurait été intéressant de voir si c'est possible ^^ surtout qu'il y a la place du potentiomètre qu'on aura retiré. Par il est évident que si c'est trop complexe on le fera à l'extérieur, sur l'axe de sortie
Répondre à ce sujet







0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

