
TP (ça dépend des lycées) : physique mardi ; SI lundi 11 juin.
Les écrits (qui commencent par la philo) du lundi 18 au vendredi 22 juin.
Bon courage


Staff Robot Maker


Posté 03 juin 2012 - 01:46
TP (ça dépend des lycées) : physique mardi ; SI lundi 11 juin.
Les écrits (qui commencent par la philo) du lundi 18 au vendredi 22 juin.
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 05 juin 2012 - 05:45
Merci ^^ (décidément, sur ce sujet, j'arrive jamais à voir quand tu réponds "^^).Bon courage
Staff Robot Maker
Posté 30 juin 2012 - 01:43

Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 30 juin 2012 - 09:04
Yep j'attendais de te revoir !Et si on s'y remettait ?
Toujours partant ?
Staff Robot Maker
Posté 30 juin 2012 - 10:41
mon micro servo est transparent et on voit bien que les composants sont des CMS (alors pour la transformation c'est pas top... ).
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 30 juin 2012 - 11:14
Bah c'est tout petit *-* Et si j'ai bien compris il faut cisailler une butée mécanique et couper une piste en cuivre, non ? Bref les ptits trucs avec mes gros doigts c'est pas topJ'ai pas compris en quoi le fait que les composants sont des CMS indique que ppour la transformation c'est pas top.


Ok j'enverrai d'autres messages pour donner mes avancées (enfin... "avancée" est un grand motSinon je fais des recherches dans mon coin par rapport au reste de ce que tu m'as dis et je renvois un message dans la journée
 ).
).Bonne ballade( En ce moment je suis sur Paris =P )
 (si tu veux un magasin d'électronique il y a par exemple selectronique place de la nation -je tiens à préciser que je ne fais pas de pubs c'est juste le seul que je connais XD-).
(si tu veux un magasin d'électronique il y a par exemple selectronique place de la nation -je tiens à préciser que je ne fais pas de pubs c'est juste le seul que je connais XD-).
Membre passionné

Posté 30 juin 2012 - 12:52
A.R.M.I
Autonomous Robotics Mechanics Intelligent
Staff Robot Maker
Posté 01 juillet 2012 - 03:43
Merci de partager ton expériencesalut
je me permet de te repondre pour les moteur CC d'un lecteur de dvd je les essayer pour faire des ''bras'' sur mon robot et il ne sont pas du tout puissant pour une barre en plastique de 20 cm et qui pèse 200g le moteur n'a pas réuci a le lever ...
Maxou
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 01 juillet 2012 - 06:02
J'avoue que ça ne me surprend pas, surtout qu'il n'a pas de train de réduction. Mais merci quand même pour le retour d'expériencesalut
je me permet de te repondre pour les moteur CC d'un lecteur de dvd je les essayer pour faire des ''bras'' sur mon robot et il ne sont pas du tout puissant pour une barre en plastique de 20 cm et qui pèse 200g le moteur n'a pas réuci a le lever ...
Maxou
 ). Je ne sais pas trop comment expliquer mon idée autrement que par un schéma alors... go paint
). Je ne sais pas trop comment expliquer mon idée autrement que par un schéma alors... go paint 
Staff Robot Maker
Posté 01 juillet 2012 - 10:50
J'ai une idée pour faire une sorte de potar sans butée. Par contre c'est une peu galère à faire (mais je sais que t'aimes bien les idées barbares !
Bon le schéma est plus long que prévu x') J'éditerai mon message pour le mettre tout à l'heure.
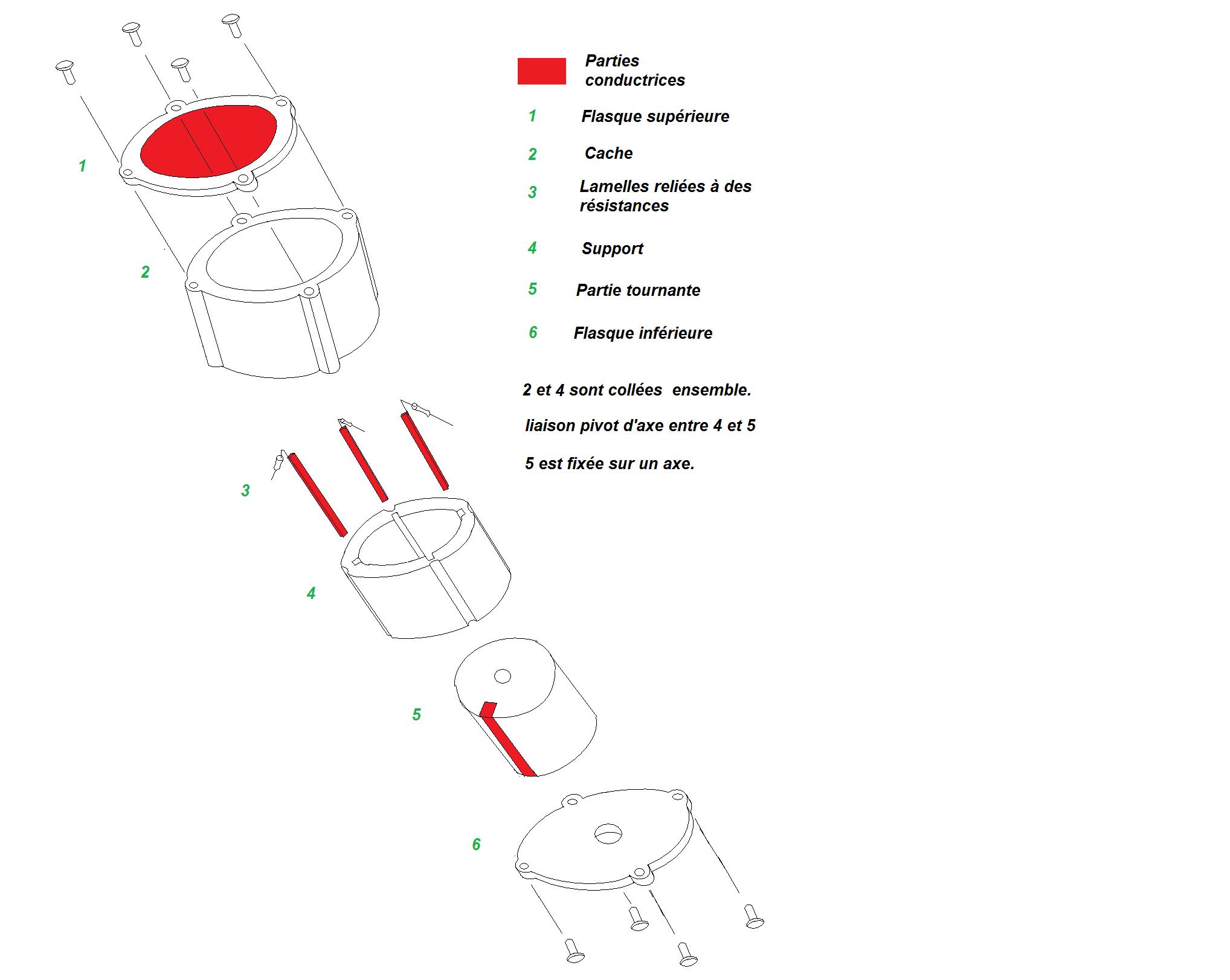
EDIT : comme promis voici le schéma x')
Toutes les résistances sont reliées au +Vcc.
Alors petite explication : on relie un axe à la pièce tournante. Celle-ci va donc tourner (sans blague... ? xD). Grâce à cette rotation, un contact va pouvoir se fermer avec l'une des résistances. Un fil, fixé sur la flasque supérieure, est relié au µc (sur une patte analogique). Pour éviter d'avoir toujours la même tension, on rajoute une autre résistance pour créer un pont diviseur de tension à l'entrée du µc.
De cette façon, puisque la seule inconnue est la valeur de la résistance qui sera reliée au pont diviseur et que toutes les résistances ont des valeurs différentes, le µc peut savoir de combien de degrés on a tourné (plus il y a de lamelles avec des résistances et plus la précision sera grande).
Bon j'avoue que mon système a d'énormes défauts notamment au niveau de la précision qu'il faudrait mais bon... je propose
Dont une qui ressemble beaucoup au modèle que tu viens de donner mais j'en d'autre ^^ dont la méthode incrémentale par micro switch ^^ je fais un package et je te présente tout ça dans un prochain post si cela t'intéresse. Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Staff Robot Maker
Posté 02 juillet 2012 - 03:05
( car justement c'est ce qu'on fait x) )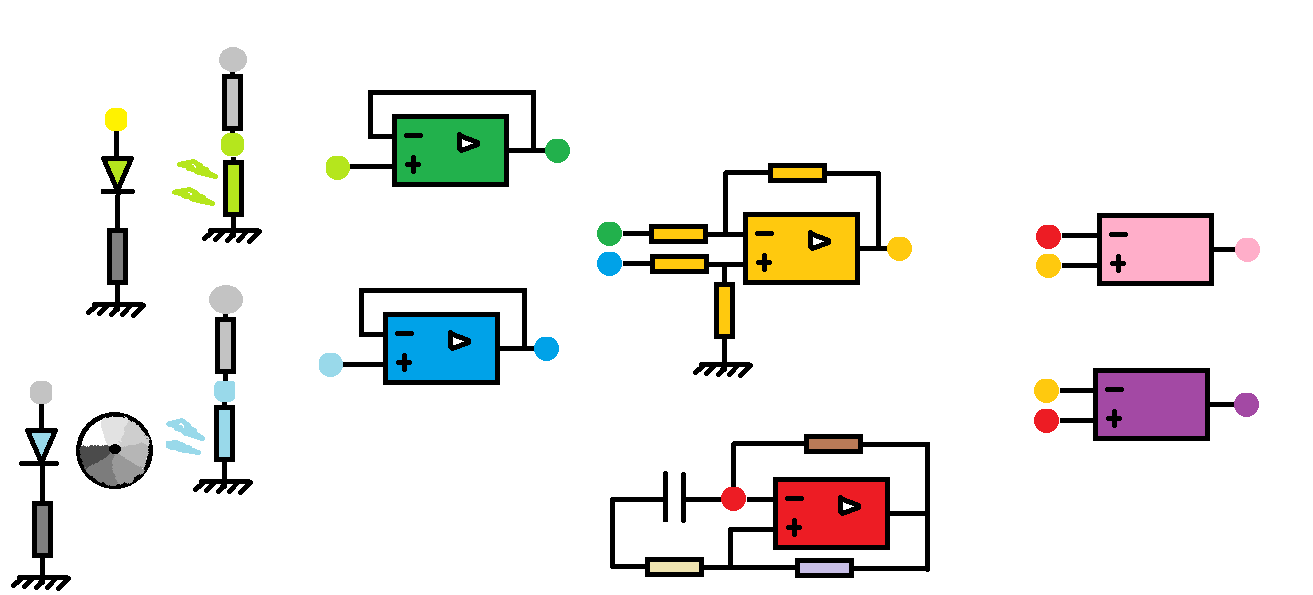 ( j'espère que ta solution sera plus avantageuse que la mienne ) petit rappel tu n'as le droit qu'à une seule patte liant maitre et esclave pour que ton système soit comparable au mien ^^
( j'espère que ta solution sera plus avantageuse que la mienne ) petit rappel tu n'as le droit qu'à une seule patte liant maitre et esclave pour que ton système soit comparable au mien ^^ Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 02 juillet 2012 - 09:54
Ok, je veux bien merci ^^Oui comme tu le disais j'aime ce genre d'idée plus ou moins barbare et j'en ai à la pelle Dont une qui ressemble beaucoup au modèle que tu viens de donner mais j'en d'autre ^^ dont la méthode incrémentale par micro switch ^^ je fais un package et je te présente tout ça dans un prochain post si cela t'intéresse.
C'est vrai que c'est pas mal comme truc. Mais là du coup c'est toi qui te colle à la prograqui permet de contrôler jusqu'à 4 servo ( tient 4 mais c'est génial non ? =) ) en gardant une input genre pour par exemple asservir le pic si plusieurs modules doivent être connecté.
Autre remarque la puce seule coûte aux alentour des 2 dollars ... donc ça rentre pil poil dans le cout souhaité
du coup le shémas que je propose c'est : un pic équivalent au 08m permetant donc de contrôler 4 sortie et d'avoir une entrée dispo en plus de la connectique de programmation rapide
(c'est du C, faut que j'apprenne *-*).Je pense que ce sera le plus simple. Par contre, on retombe sur les problèmes du type : il faut un motoréducteur léger et peu encombrant "^^Ensuite on utilise 2 servo simple pour les rotations non continues et on utilise une méthode d'asservissement externe faite à la main pour les deux autres moteurs. Je vais me renseigner d'avantage sur les cartes de commande à l'intérieur des servo pour voir comment en reproduire une copie modifié incorporant l'asservissement souhaité
Bah perso je pense qu'un seul suffit et rentre plus dans notre CDCF. (on a besoin que d'un esclave qui peut servir de maître, enfin je pense). Après, le truc possible c'est de mettre un switch dans le robot : soit l'entrée est au +5V (le pic est maître) soit à une résistance de rappel à la masse (le pic est géré par un autre pic, c'est défini au début du programme par cette entrée).Sinon pour plus de sureté et avoir plus de pin entrée sorties on peut utiliser 2 voir 3 08m et faire comme ce qu'on voulait faire avec le 10f ... mais au moins on est sur que ça marche avec les 08m .
Membre passionné
Posté 02 juillet 2012 - 10:01
Franchement je trouve ton idée très intéressante. C'est comme ça que l'on a vu le PWM en TP (enfin c'était un signal triangulaire comparé à un signal continu).Bon vu que tu m'as fais un beau dessin sous paint j'ai décidé de représenter ce à quoi peut ressembler un asservissement exterieur fait main avec commande par PWM variant entre 0 et 100% comme si on commandait une del en intensité lumineuse ( car justement c'est ce qu'on fait x) )
alors déjà : le schémas
petite explications
le point en gris représente l'alimentation standard genre 3V
ton pic commande en intensité lumineuse une led blanche ( celle représenté en vert clair) on utilise une photo résistance ( en vert clair ) et l'aop vert en mode suiveur pour avoir une tension image de l'intensité lumineuse = angle de commande ( permet en plus une isolation genre opto-coupleur ) (point vert )
le moteur lui entraine en rotation un disque d'opacité variable en fonction de l'angle. une led ( en beu claire) éclaire d'un coté le disque et de l'autre on utilise une photo résistance ( bleu claire ) et l'aop bleu en mode suiveur pour avoir une tension image de l'angle du moteur ( point bleu )
l'aop doré prend les deux données précédentes et fait la différence des deux. on arrive au point doré.
l'aop rouge donne un signal pseudo triangulaire qui une fois comparé à une constante permet de faire un PWM.
les comparateur rose et violet comparent les signal triangulaire rouge à la constante doré. On obtient deux PWM opposés ( car les entrées de l'un et l'autre sont inversé ) ce qui nous permet de commander un pont en H en locked antiphase
le pont en H commande le moteur le moteur entraine le disque opaque et le système est bouclé !
pour info ce type de disque opaque peut être simplement imprimé sur un transparent pour rétroprojecteur
Voilà dis moi ce que tu en pense
Je vais essayer d'y réfléchir mais je promets rien "^^ Je suis loin d'avoir tes connaissances en élec xDMoi j'attend que tu proposes l'équivalent avec un petit pic esclave genre l'exemple donné ici avec un moteur cc
Staff Robot Maker
Posté 02 juillet 2012 - 12:15
Ok, je veux bien merci ^^
( mais tu as pu en voir une dans mon post précédent avec la diode et le disque opaque C'est vrai que c'est pas mal comme truc. Mais là du coup c'est toi qui te colle à la progra
Par contre ça risque de pas être simple à souder : CMS :x
Et je sais pas s'il se vend seul.
J'ai trouvé des trucs intéressants :
- je crois qu'il existe autrement qu'en CMS
- un site qui a l'air pas mal pour expliquer son utilisation
- grâce au site précédent, je crois qu'il a un équivalent chez les pics : le 12F683. Il a l'air d'ailleurs d'être trouvable pour pas trop cher (enfin je suis quand même curieux de voir où tu as trouvé le 08m à 2 dollars ^^).
et oui ça se vend seul ) par contre ça peut être intéressant d'avoir une connectique à ajouter pour une reprogrammation facile. ... il ne me semble pas que tu l'ais proposé au départ ^^Je pense que ce sera le plus simple. Par contre, on retombe sur les problèmes du type : il faut un motoréducteur léger et peu encombrant "^^
au pire des cas on a juste à enlever l'électronique de commande d'un servo et de supprimer la buté mécanique ( modification la plus facile ^^ ) l'élecrtonique de commande pouvant servir pour d'autre projet Bah perso je pense qu'un seul suffit et rentre plus dans notre CDCF. (on a besoin que d'un esclave qui peut servir de maître, enfin je pense).
Après, le truc possible c'est de mettre un switch dans le robot : soit l'entrée est au +5V (le pic est maître) soit à une résistance de rappel à la masse (le pic est géré par un autre pic, c'est défini au début du programme par cette entrée).
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Staff Robot Maker
Posté 02 juillet 2012 - 12:55
Franchement je trouve ton idée très intéressante. C'est comme ça que l'on a vu le PWM en TP (enfin c'était un signal triangulaire comparé à un signal continu).
Enfin, je me demande : c'est avec cette méthode que tu avais contrôlé ton bras (enfin en remplaçant le potar par le couple del/photorésistance) ? (je ne me souviens plus trop).
en légèrement simplifié ( mais du coup les petites modifications sont non testé ) mais comme je n'ai pas utilisé le couple del photorésistance non plus je ne sais pas ce que ça vaut niveau linéarité x) ça fait deux en un surtout si on doit faire la réalisation à la main ^^ par contre faudra faire un genre de cache pour éviter que la luminosité ambiante perturbe le système mais de toute façon on allait pas le laisser tout nu notre vers non ? x) Je vais essayer d'y réfléchir mais je promets rien "^^ Je suis loin d'avoir tes connaissances en élec xD

Bon sinon j'avais juste une remarque à te soumettre : si l'on ne parvient pas à trouver une motorisation économique qui réponde à nos attentes, on devra peut être modifier le cahier des charges en abaissant nos exigences. Je veux dire par là, faire un prototype qui ne supporte que son poids.
environ 11 euros les 4 moteurs ( moi ça me ferait plaisir de les lire aussi ! ) et d'ailleur, il devient quoi Swolf ?
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 02 juillet 2012 - 02:57
Oui mais ça fait un rappel ^^Ok je te fais ça ( mais tu as pu en voir une dans mon post précédent avec la diode et le disque opaque
Effectivement si j'ai bien compris il gère l'i²c, il a des can, il tourne sous 32MHz (bon ça on s'en fiche un peu je pense).comme tu le dis, ça existe autrement qu'en CMS et oui ça se vend seul
en fait j'étais tombé sur la version amélioré seul ici = à 2,3 euros. ( il y a même des petits plus je te laisse regarder ) par contre ça peut être intéressant d'avoir une connectique à ajouter pour une reprogrammation facile. ...
Je suis très loin de connaître tous les pics et celui là bah... je le connaissais pas xD Je l'ai découvert grâce au site que je je t'ai mis ^^Après moi je suis ouvert à toute proposition d'équivalent x) perso je ne me sent pas encore de taille à le programmer x) mais faudra que ça vienne !
ton lien explicant comment utiliser le 08m est super !
ensuite le pic 12f semble être une bonne alternative il ne me semble pas que tu l'ais proposé au départ ^^
C'est sûr ! ^^ Mais bon le truc que j'ai pas compris c'est qu'ils le disent programmable en basic "^^Après moi je suis ouvert à toute proposition d'équivalent x) perso je ne me sent pas encore de taille à le programmer x) mais faudra que ça vienne !
Oulah ça serait un peu la merde à gérer je pense "^^ Mais bon d'un autre côté je sais pas si on idée peut fonctionner x")j'avais plus pensé à une interruption. Genre : tant qu'il n'y a pas d'ordre de pic maitre ( qu'il soit connecté ou non ) il exécute son programme interne. Dès qu'il reçoit un ordre il arrête son programme et fait ce que le maitre lui dit.
C'est sûr x') Surtout que si on le fait à la main il risque d'y avoir des frottements et pas de résultats :')oui en gros c'est ça en légèrement simplifié ( mais du coup les petites modifications sont non testé ) mais comme je n'ai pas utilisé le couple del photorésistance non plus je ne sais pas ce que ça vaut niveau linéarité x)
Mais sur le coup ça m'a paru être une bonne idée ^^ déjà : moins hasardeuse que l'utilisation d'un filtre en sortie d'un pic ... ( je ne sais pas si c'est possible x) ) et puis un découplage par coupleur optique je me suis dit que c'était pas mal ça fait deux en un
Et pour le remplacement du potentiomètre ça permet aussi de ne pas avoir de frottements surtout si on doit faire la réalisation à la main ^^ par contre faudra faire un genre de cache pour éviter que la luminosité ambiante perturbe le système mais de toute façon on allait pas le laisser tout nu notre vers non ? x)
Comme ça, il perds des grammes et hop on a besoin de moins de couple
Membre passionné
Posté 02 juillet 2012 - 02:57
J'ai compris ce que tu voulais faire. Mais je pense que le système perdrait en rapidité, non ? A ce moment là autant prendre un µc un peu plus gros qui puisse avoir 6 entrées/sorties de plus (deux fois : 1 entrée pour le capteur, 2 sorties pour les PWM inversés). J'ai une idée (je ne sais pas si ça marchera) : mettre un CI inverseur en sortie du pic qui gère la pwm. De cette façon tu prends le signal avant le CI et tu le mets sur un "côté" du pont en H et tu prends le signal de sortie de l'inverseur que tu mets en entrée sur le deuxième côté du pont. Techniquement ça permettra d'avoir 2 pwm inversées avec 1 seule sortie du µc (surtout que je ne sais pas si on pourrait faire 2 pwm inversés simultanément avec un µc).non je te demandais pas un truc d'élec mais un programme ^^ c'est à dire au lieu d'utiliser le montage que je propose qui contiendrait deux Ci ( un de 14 pattes et un de 8 pattes + les composants autour) d'utiliser un micro pic en esclave du 08m ou du 12f pour asservir le moteur . si tu veux je te donne l'algo que j'imagine : ce pic esclave aura une commande en PWM issus du 08m ou du 12f et une image de la position angulaire (un PWM ou par pin analogique ou par système d'incrémentation. Il devra les traiter et donner en sortie deux PWM opposés qui permetteront de controler un pont en H. Exemple simple : si tu donne un pwm de 50% en commande et que le moteur est déjà en position médiane en sortie tu auras deux pwm de 50% mais opposé alors que si le moteur était en position extrême gauche par exemple tu aurais un pwm à 100% et l'autre à 0% et si le moteur était en extrême droite cela aurait été le contaire : le premier pwm de sortie à 0% et l'autre à 100%. ainsi de suite. J'espère avoir été claire
C'est sûr ça serait plus simple à trouverau pire des cas si on trouve des servo qui conviennent on leur retire l'électronique de commande et on les transforme en motoréducteur et on garde l'électronique de commande pour autre chose =)
Le problème c'est que ce serait des servo standards, non ? Et là on aurait un problème de taille (remarque on pourrait faire de gros versOn peut même aller jusqu'à des couple d'à peu près 4kg.cm pour un prix inférieur à 24 euros les 4 moteurs ...
).C'est sûr c'est toujours le risque '^^Après il y a aussi ebay mais attention certains ne donnent pas assez de spécification à mon gout : attention au copies avec couple bcp plus faible =/
C'est sûr "^^ Swolf travaille sur un robot avec l'un de ses partenaires de ppe je crois ^^ (d'ailleurs ils auraient sûrement besoin de toi pour de la cinétiquePS : c'est dommage qu'il n'y ait pas plus d'intervenant sur cette discussion ^^ on pourrait avoir plus de retour d'expérience etc ... surtout que je sais que certains nous suivent en silence de temps en temps ( moi ça me ferait plaisir de les lire aussi ! ) et d'ailleur, il devient quoi Swolf ?
).
Staff Robot Maker
Posté 02 juillet 2012 - 03:18
Et si à poil le vers !
surtout qu'il faut isoler les photorésistance de la lumière ambiante si on utilise cette solution ^^ J'ai compris ce que tu voulais faire. Mais je pense que le système perdrait en rapidité, non ?
A ce moment là autant prendre un µc un peu plus gros qui puisse avoir 6 entrées/sorties de plus (deux fois : 1 entrée pour le capteur, 2 sorties pour les PWM inversés).
c'est plus rapide et ça permet d'économiser les pins de sortie du pic au dessus en ne lui en prenant qu'une seule. J'ai une idée (je ne sais pas si ça marchera) : mettre un CI inverseur en sortie du pic qui gère la pwm. De cette façon tu prends le signal avant le CI et tu le mets sur un "côté" du pont en H et tu prends le signal de sortie de l'inverseur que tu mets en entrée sur le deuxième côté du pont. Techniquement ça permettra d'avoir 2 pwm inversées avec 1 seule sortie du µc (surtout que je ne sais pas si on pourrait faire 2 pwm inversés simultanément avec un µc).
mais j'ai choisis d'utiliser un comparateur comme ça comme j'en ai déjà besoin d'1 pour la solution que je propose je prend un CI qui en contient 2 ^^ Et donc oui ça marche Le problème c'est que ce serait des servo standards, non ? Et là on aurait un problème de taille (remarque on pourrait faire de gros vers
Par contre les tensions d'alimentation ne sont pas donnés sur ton site. Donc c'est peut être sous 6V.
C'est sûr "^^ Swolf travaille sur un robot avec l'un de ses partenaires de ppe je crois ^^ (d'ailleurs ils auraient sûrement besoin de toi pour de la cinétique
( c'est quoi son problème ? x) )
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 02 juillet 2012 - 04:43
A la limite on peut le faire en calendrier pour que ce soit un minimum solide x") Au moins ça aurait l'avantage d'être économique xDD Mais bon, du plastique on peut en récupérer partoutNon on lui fait un habit en carton style incroyable expérience surtout qu'il faut isoler les photorésistance de la lumière ambiante si on utilise cette solution ^^
(l'autre jour j'ai utilisé le "capot" d'un vieux pc portable pour faire la structure d'une enceinte ).Pas faux mais bon le pic ne peut pas faire 2 actions en même temps (les 2 pwm ne seront pas synchros et ça fera de la m****). "^^non au contraire en séparant les pics selon moi on gagne en rapidité surtout si tu fais de la boucle ouverte : le pic "maitre" pourrait donner indépendament les différent ordre sans se préoccuper des calculs d'asservissements ni de quelconques retours d'informations. surtout qu'il y en a 2 asservissement à faire... En plus tu ne dois pas oublier que si le pic est tout seul pour gérer en même temps : la suivie du programme donnant les positions successive, les 2 l'asservissements des moteurs et qu'en plus il doit vérifier qu'on est pas en train de l'asservir ça risque de faire trop pour ces petites épaules surtout si il ne peut faire qu'une chose à la fois. c'est pour ça que le lien vers po bot que tu m'as donné suggérait l'usage d'un pic esclave pour l'asservissement du moteur c'est plus rapide et ça permet d'économiser les pins de sortie du pic au dessus en ne lui en prenant qu'une seule.
Ok cool, ben à la limite on peut utiliser cette méthode. A ce moment là le pic esclave devra être un chouilla plus gros (sinon on perd une pin).oui c'est ce que je fais mais j'ai choisis d'utiliser un comparateur comme ça comme j'en ai déjà besoin d'1 pour la solution que je propose je prend un CI qui en contient 2 ^^
sinon une nand ferait très bien l'affaire Et donc oui ça marche
Ils veulent déterminer le couple dont ils auront besoin. Mais je crois qu'ils ont déjà acheté les moteurs "^^Je suis là si il a besoin ( c'est quoi son problème ? x) )
Membre passionné

Posté 02 juillet 2012 - 06:14
)






0 members, 0 guests, 0 anonymous users




