
Bonsoir tous le monde,...
Après avoir longuement réfléchi,j'ai décidé de construire un robot semblable à un singe,il aura deux pates et une queue,mais sera sur 3 roulettes ,une roullette à chaque pied et une au bout de la queue qui servira pour garder l'équilibre.Il y aura 2 moteurs pour les roues avant,pour tourner à gauche,j'utilise la roue sous le pied gauche,pour tourner à droite : la roue sous le pied droit.Et pour avancer...les 2 roues en même temps.J'aimerai aussi qu'il puisse bouger les bras .Ce sera surtout un robot pour rire mais pourquoi pas aussi un robot de combat (combattre des robots ressemblant à des humains et non des robots avec des scies circulaires ...).Il devrais mesuré env.70-80 cm.
Je ne l'ai pas encore imaginé.J'ai déjà construit des robots , mais ils étaients commandés par mannettes reliées par des câbles (mini robot de combat,env.10 x 15 cm et 10 cm de hauteur,en carton:3 roues en bouchon de liège,deux moteurs et un autre avec un cd comme scie circulaire,domage que je ne l'ai plus,je vous aurais envoyé une photo )et non par récepteur et emmetteur car je n'en avais pas.Je n'en ai toujours pas mais je peux chercher.Pour mon niveau en électronique:j'ai réussi à construire un onduleur avec des composants démontés (récupérés),il fonctionnne mais je n'ai pas encore pu vérifier sa fréquence(50hz normalement),j'ai vu ça dans "incroyable expérience",j'ai du fabriquer un oscillateur sur le passage.
Merci de me dire votre avis,si c'est jouable,si c'est intéressant.
... Bonne nuit tout le monde !

47 réponses à ce sujet
#2

Tuc
-

- Membres
- 85 messages
Membre
- Gender:Male
- Location:Languedoc-Roussillon
- Interests:Informatique, électronique, escalade
Posté 30 avril 2013 - 10:15
Salut et au passage, bienvenue sur le forum. 
Entre 70 et 80 cm ? C'est vraiment grand, même pour ce type de robot. Je penses que tu devrais viser moins haut. Après, ce n'est que mon avis.
Je ne suis pas spécialement fan des robots de combat (même si ce n'est pas le but initial du projet) mais oui, je penses que c'est un robot qui peut être intéressant. Ensuite, je suis convaincu que la taille envisagée n'est pas du tout une bonne idée et que tu devrais viser 30 cm grand maximum m'enfin, tout dépend de ton budget et du temps que tu peux accorder pour ton projet.
Ensuite, si tu as besoin plus tard de conseils des autres membres quand à l'achat des pièces, il faudra nous dire ton budget.
Entre 70 et 80 cm ? C'est vraiment grand, même pour ce type de robot. Je penses que tu devrais viser moins haut. Après, ce n'est que mon avis.
Merci de me dire votre avis,si c'est jouable,si c'est intéressant.
Je ne suis pas spécialement fan des robots de combat (même si ce n'est pas le but initial du projet) mais oui, je penses que c'est un robot qui peut être intéressant. Ensuite, je suis convaincu que la taille envisagée n'est pas du tout une bonne idée et que tu devrais viser 30 cm grand maximum m'enfin, tout dépend de ton budget et du temps que tu peux accorder pour ton projet.
Ensuite, si tu as besoin plus tard de conseils des autres membres quand à l'achat des pièces, il faudra nous dire ton budget.
- seb2d2 aime ceci
Étudiant GEII - 1A
#3
seb2d2
-
- Membres
- 99 messages
Membre
- Gender:Male
Posté 01 mai 2013 - 10:43
Salut et merci pour ton conseil ,effectivement c'est un peu grand,mais j'hésitais entre 2 robots,un robot spécialement pour le combat qui lui ferais environ 20cm ;et pour le robot-singe ,j'avais comparé sa taille par rapport à celle du robot combat,mais finalement ,il ne mesurera pas plus de 40 cm.En ce qui concerne mon budget,...comme pour l'éolienne et pour la moto,c'est avec des objets démontés ou de récupération,mais j'ai des planches de bois que je peux découper,des clous,de l'expérience et de l'énergie (la jeunesse),quelques moteurs mais seulement 3 assez puissants;j'ai trouvé un emmeteur et récepteur 4 fonctions et un autre à 1 fonction.J'ai un poste à souder,quelques composants,si j'ai besoin d'autre chose,je verrais.
Merci également à tous ceux qui ont vu cet article et continuez à donner vos avis.
(Mon avis:je ferrais mieux de faire le robot de combat qui me semble plus facile à faire,car un robot pour s'amuser:on veut qu'il aille assez vite,qu'il sache faire plus de chose,... je suis envore entrain de faire les plans des deux robots,je ferrais le plus simple).Et je le répète:"Merci également à tous ceux qui ont vu cet article et continuez à donner vos avis."
Merci également à tous ceux qui ont vu cet article et continuez à donner vos avis.
(Mon avis:je ferrais mieux de faire le robot de combat qui me semble plus facile à faire,car un robot pour s'amuser:on veut qu'il aille assez vite,qu'il sache faire plus de chose,... je suis envore entrain de faire les plans des deux robots,je ferrais le plus simple).Et je le répète:"Merci également à tous ceux qui ont vu cet article et continuez à donner vos avis."
Si tu veux sortir de l'ombre,retire ton chapeau.
#4
seb2d2
-
- Membres
- 99 messages
Membre
- Gender:Male
Posté 01 mai 2013 - 11:06
Pour les moteurs,j'en ai 3:
-2 qui étaient dans un quad pour enfant (où lenfant s'assoit dessus),ils fonctionnaient avec 6 v mais vu les batteries (6ah),ils devaient consommer pas mal d'ampères.
-1 moteur 540 trouvé dans une vieille nikko tiger-2 (je ne l'ai pas saccrifié,elle était défaillante),moteur fonctionnant avec une batterie 7,2 v (donc avec 8.64 v ;puisqu'il faut multiplier par 1,2 le nombre de volt inscrit quand on recharge une batterie de voiture télécommandée,à 7,2 v elle ne roule pas).
Je prendrai les 2 moteurs de quad pour les deux roues motrice je pense.
-2 qui étaient dans un quad pour enfant (où lenfant s'assoit dessus),ils fonctionnaient avec 6 v mais vu les batteries (6ah),ils devaient consommer pas mal d'ampères.
-1 moteur 540 trouvé dans une vieille nikko tiger-2 (je ne l'ai pas saccrifié,elle était défaillante),moteur fonctionnant avec une batterie 7,2 v (donc avec 8.64 v ;puisqu'il faut multiplier par 1,2 le nombre de volt inscrit quand on recharge une batterie de voiture télécommandée,à 7,2 v elle ne roule pas).
Je prendrai les 2 moteurs de quad pour les deux roues motrice je pense.
- seb2d2 aime ceci
Si tu veux sortir de l'ombre,retire ton chapeau.
#7
seb2d2
-
- Membres
- 99 messages
Membre
- Gender:Male
Posté 01 mai 2013 - 06:22
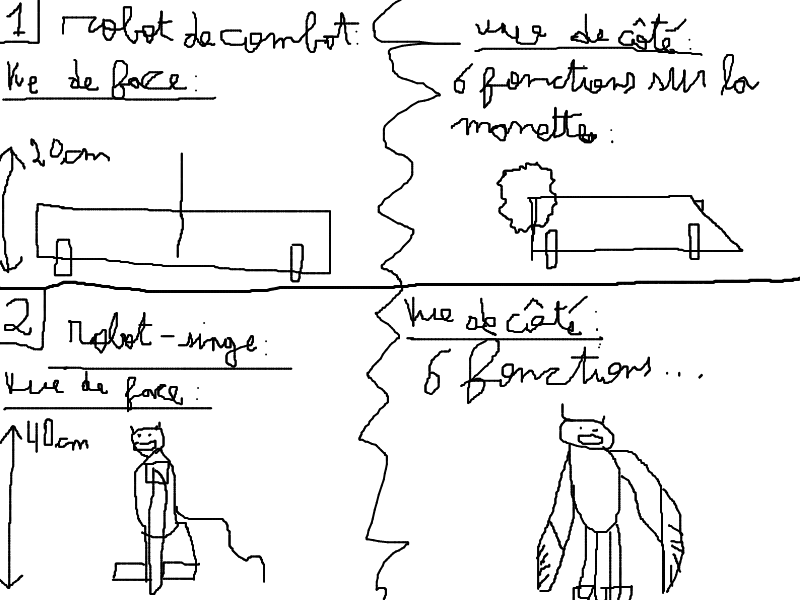
Je vous présente les 2 robots que j'ai imaginé:
1er robot,fonctions:[1]droite,[2]gauche(,les 2 en même temps donne lieu à une marche avant,donc:2 fonctions mais 3 manipulations possibles),[3]arrière (pour les deux roues en même temps),[4]scier,[5]charger et [6]tirer (dans incroyable expérience,j'ai vu comment faire un canon électromagnétique d'environ 3 joules,mon frère a réussit à le reproduire).Le canon sera à l'arrière.( je me suis inspiré de cette vidéo:
,dans le 2eme combat. )
2ème robot,fonctions:[1]droite,[2]gauche(,les 2 en même temps donne lieu à une marche avant,donc:2 fonctions mais 3 manipulations possibles),[3]arrière (pour les deux roues en même temps),[4]lever les bras de haut en bas,[5]charger et [6]tirer.Le canon sera sur la paume de la main droite.
Le 1er robot est meilleur en combat,juste un peu moin "stylé",mais plus facile à faire et demande moins de matériel.
Merci de me donner votre avis,celui qui VOUS plaît le mieux,argumenté si possible,sinon c'est pas grave,et bonne fin de journer.
1er robot,fonctions:[1]droite,[2]gauche(,les 2 en même temps donne lieu à une marche avant,donc:2 fonctions mais 3 manipulations possibles),[3]arrière (pour les deux roues en même temps),[4]scier,[5]charger et [6]tirer (dans incroyable expérience,j'ai vu comment faire un canon électromagnétique d'environ 3 joules,mon frère a réussit à le reproduire).Le canon sera à l'arrière.( je me suis inspiré de cette vidéo:
,dans le 2eme combat. )
2ème robot,fonctions:[1]droite,[2]gauche(,les 2 en même temps donne lieu à une marche avant,donc:2 fonctions mais 3 manipulations possibles),[3]arrière (pour les deux roues en même temps),[4]lever les bras de haut en bas,[5]charger et [6]tirer.Le canon sera sur la paume de la main droite.
Le 1er robot est meilleur en combat,juste un peu moin "stylé",mais plus facile à faire et demande moins de matériel.
Merci de me donner votre avis,celui qui VOUS plaît le mieux,argumenté si possible,sinon c'est pas grave,et bonne fin de journer.
Image(s) jointe(s)
- seb2d2 aime ceci
Si tu veux sortir de l'ombre,retire ton chapeau.
#8
seb2d2
-
- Membres
- 99 messages
Membre
- Gender:Male
Posté 02 mai 2013 - 10:18
Je pense que je vais faire le robot de combat qui m'a l'air plus simple à réaliser.Comme j'ai changé de robot;je vais changer de sujet,mais n'hésiter pas à mettre des commentaires ,des avis,... je les lirai et y répondrai.
- seb2d2 aime ceci
Si tu veux sortir de l'ombre,retire ton chapeau.

#10
seb2d2
-
- Membres
- 99 messages
Membre
- Gender:Male
Posté 02 mai 2013 - 04:22
Salut Cocazero ,c'est une bonne question.
Je comptais prendre un emmeteur-récepteur déjà tout fait à la base.
Je sais qu'il y a des trucs comme par exemple : dès que le robot tombe,automatiquement (sans mannette),le robot se relève en bougeant les pieds et en pliant le ventre.Mais je compte tous contrôler.
Il y a aussi des choses de ce type:j'appuie sur "donner un coup de poing" et le robot met sa jambe gauche en avant et recule son coude droit et son épaule droite,puis le balance fort et enfin revient à sa position initial;tout ça en une touche.
C'est parce que je n'ai pas le matériel pour programmer et pour lui faire faire toutes ses choses que j'ai finalement choisi de faire le robot de combat qui me semble plus simple à faire puisqu'il n'y a pas de programmation à faire.
J'espère avoir répondu à ta question,dit-moi,quel robot des deux que j'ai présenté tu préfères ?
Je comptais prendre un emmeteur-récepteur déjà tout fait à la base.
Je sais qu'il y a des trucs comme par exemple : dès que le robot tombe,automatiquement (sans mannette),le robot se relève en bougeant les pieds et en pliant le ventre.Mais je compte tous contrôler.
Il y a aussi des choses de ce type:j'appuie sur "donner un coup de poing" et le robot met sa jambe gauche en avant et recule son coude droit et son épaule droite,puis le balance fort et enfin revient à sa position initial;tout ça en une touche.
C'est parce que je n'ai pas le matériel pour programmer et pour lui faire faire toutes ses choses que j'ai finalement choisi de faire le robot de combat qui me semble plus simple à faire puisqu'il n'y a pas de programmation à faire.
J'espère avoir répondu à ta question,dit-moi,quel robot des deux que j'ai présenté tu préfères ?
- seb2d2 aime ceci
Si tu veux sortir de l'ombre,retire ton chapeau.
#11
R1D1
-

- Modérateur
-

- 1â¯211 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 02 mai 2013 - 04:43
Salut Cocazero ,c'est une bonne question.
Je comptais prendre un emmeteur-récepteur déjà tout fait à la base.
Je sais qu'il y a des trucs comme par exemple : dès que le robot tombe,automatiquement (sans mannette),le robot se relève en bougeant les pieds et en pliant le ventre.Mais je compte tous contrôler.
Il y a aussi des choses de ce type:j'appuie sur "donner un coup de poing" et le robot met sa jambe gauche en avant et recule son coude droit et son épaule droite,puis le balance fort et enfin revient à sa position initial;tout ça en une touche.
C'est parce que je n'ai pas le matériel pour programmer et pour lui faire faire toutes ses choses que j'ai finalement choisi de faire le robot de combat qui me semble plus simple à faire puisqu'il n'y a pas de programmation à faire.
J'espère avoir répondu à ta question,dit-moi,quel robot des deux que j'ai présenté tu préfères ?
À moins d'acheter un robot tout fait à 500, tu devras passer par une étape de programmation, ne serait-ce que pour traiter les informations reçues par le récepteur et faire faire au robot ce que tu veux. Je ne sais pas ce que tu appelles émetteur/récepteur 4 fonctions (4 canaux peut-être ?), mais il de toute façon faire le lien entre le récepteur et les actionneurs de ton robot.
#12
seb2d2
-
- Membres
- 99 messages
Membre
- Gender:Male
Posté 02 mai 2013 - 05:19
Salut r1d1,
je ne comprends pas trop;quand je démonte une voiture télécommandé,j'enlève tous les moteurs et la partie mécanique ainsi que tout le plastique et la carrosserie,il me reste la mannette (emmeteur) et le récepteur qui est l'antenne,le circuit imprimé (quartz,...)et son alimentation ; si ilest alimenté (et allumé):sur aucun fil qui dépasse (là où j'ai coupé les moteurs) j'ai du courant,la mannette serre à donner du courant,si j'appuie sur "avancer",il y a du courant là où le/les moteurs devaient tourner.
Je ne vois pas où je devrait programmer qqch,expliquez-vous ...
je ne comprends pas trop;quand je démonte une voiture télécommandé,j'enlève tous les moteurs et la partie mécanique ainsi que tout le plastique et la carrosserie,il me reste la mannette (emmeteur) et le récepteur qui est l'antenne,le circuit imprimé (quartz,...)et son alimentation ; si ilest alimenté (et allumé):sur aucun fil qui dépasse (là où j'ai coupé les moteurs) j'ai du courant,la mannette serre à donner du courant,si j'appuie sur "avancer",il y a du courant là où le/les moteurs devaient tourner.
Je ne vois pas où je devrait programmer qqch,expliquez-vous ...
- seb2d2 aime ceci
Si tu veux sortir de l'ombre,retire ton chapeau.
#13
sky99
-

- Membres
-
- 271 messages
Habitué
- Gender:Male
Posté 02 mai 2013 - 06:13
Si tu veux faire une machine en forme de singe, mais télécomandée, qui peut avancer, reculer, tourner à gauche ou à droite, oui, tu peux "hacker" une voiture télécomandée,
et ne rien programmer.
Maintenant, c'est une voiture télécomandée avec une autre "skin", et pas un robot. Si tu veux ajouter des fonctionnalités, il faudra pouvoir programer le bouzin.
Déjà, la voiture télécomandée, utilise t'elle une conduite différentielle? (cad deux roues motrices avec chacune leur moteur indépendant, et la possibilité de tourner
dans des sens opposés : pour tourner d'un coté, une roue tourne dans un sens, et l'autre dans l'autre sens, par ex). Dans le cas contraire,
si les deux roues de ta voiture télécommandées tournent toujours dans le même sens (soit les deux vers l'avant, soit les deux vers l'arrière), déjà tu aura du mal
pour faire le robot à trois roues, à moins de réussir à utiliser un mécanisme pour orienter la troisieme roue.
Mais passée cette étape, à moins que ta voiture télécomandée ne dispose de fonctionnalités suplémentaires (par exemple une tourelle orientable en appuyant sur un bouton),
tu ne pourra pas faire grand chose d'autre sans programmer. Si tu veux faire bouger les bras, il faudra par exemple utiliser un/des servomoteurs. A quoi vas tu les brancher?
Comment fera tu comprendre au robot que tu veux bouger de tel angle? dans tel sens? rien qu'avec une articulation, il te faut déjà deux commandes : tourner dans le sens direct, et dans le sens indirect.
Si on rajoute le second bras, ça fait 4 commandes. Si tu as un second degré de liberté sur chaque bras, ça te fait 4 commandes.
A moins de découper et d'assembler des bouts de plein de voitures télécomandées, et autant de télécomandes, je vois mal comment faire sans programmer.
En fait ça me semble BEAUCOUP plus simple de prendre ton idée, d'ajouter un Arduino, et de le programmer... D'autant que la programmation Arduino se fait par USB, est extrêment simple, et très puissante...
Ce que tu veux faire n'est pas compliqué avec un peu de programmation; par contre sans rien programmer, à mon avis il faut avoir un énorme sens de la bidouille, et avoir envie
de passer pas mal de temps dessus... Bref, ça me semble plus cher et complexe de faire le projet sans programmer en récupérant des morceaux de mécanismes radiocommandés.
et ne rien programmer.
Maintenant, c'est une voiture télécomandée avec une autre "skin", et pas un robot. Si tu veux ajouter des fonctionnalités, il faudra pouvoir programer le bouzin.
Déjà, la voiture télécomandée, utilise t'elle une conduite différentielle? (cad deux roues motrices avec chacune leur moteur indépendant, et la possibilité de tourner
dans des sens opposés : pour tourner d'un coté, une roue tourne dans un sens, et l'autre dans l'autre sens, par ex). Dans le cas contraire,
si les deux roues de ta voiture télécommandées tournent toujours dans le même sens (soit les deux vers l'avant, soit les deux vers l'arrière), déjà tu aura du mal
pour faire le robot à trois roues, à moins de réussir à utiliser un mécanisme pour orienter la troisieme roue.
Mais passée cette étape, à moins que ta voiture télécomandée ne dispose de fonctionnalités suplémentaires (par exemple une tourelle orientable en appuyant sur un bouton),
tu ne pourra pas faire grand chose d'autre sans programmer. Si tu veux faire bouger les bras, il faudra par exemple utiliser un/des servomoteurs. A quoi vas tu les brancher?
Comment fera tu comprendre au robot que tu veux bouger de tel angle? dans tel sens? rien qu'avec une articulation, il te faut déjà deux commandes : tourner dans le sens direct, et dans le sens indirect.
Si on rajoute le second bras, ça fait 4 commandes. Si tu as un second degré de liberté sur chaque bras, ça te fait 4 commandes.
A moins de découper et d'assembler des bouts de plein de voitures télécomandées, et autant de télécomandes, je vois mal comment faire sans programmer.
En fait ça me semble BEAUCOUP plus simple de prendre ton idée, d'ajouter un Arduino, et de le programmer... D'autant que la programmation Arduino se fait par USB, est extrêment simple, et très puissante...
Ce que tu veux faire n'est pas compliqué avec un peu de programmation; par contre sans rien programmer, à mon avis il faut avoir un énorme sens de la bidouille, et avoir envie
de passer pas mal de temps dessus... Bref, ça me semble plus cher et complexe de faire le projet sans programmer en récupérant des morceaux de mécanismes radiocommandés.
Mon site principal : http://www.nagashur.com/ (format blog, un wiki y est aussi)
Mon profil sur hackaday.io : https://hackaday.io/sky99 (hackerspace en anglais, j'y ai plein de projets)
Mon Github : https://github.com/sarinkhan/
#14
seb2d2
-
- Membres
- 99 messages
Membre
- Gender:Male
Posté 02 mai 2013 - 06:55
Effectivement,je ne peux pas récupérer la manette et le récepteur de la voiture,mais si j'achète ou récupère un émetteur 6 fonctions,là je n'aurais rien à programmer.Par contre pour transformer le système à 4 roues en un système à 3 roues,c'est jouable,ensuite il ne me manquerai plus que 3 fonctions à metre sur mon robot : charger,tirer (canon électro-magnétique qui se charge en 14 secondes) et scier [j'ai choisi le robot de combat,car je pense que le robot singe sera trop compliqué].
Sur la manette,il y a av/ar et d/g ;je branche av/ar sur les 2 moteurs (ceux qui ont les 2 roues),et je branche d/g sur les 2 moteurs aussi mais un des deux moteurs cette fois-ci ne tournera pas dans le même sens ,et la 3ème roue (à l'arrière) est une roue mise juste pour garder l'équilibre,rester debout,elle pourra tourner sur elle-même pour ne pas gêner le fait que le robot tourne.
ps:Tu me dis " Si tu veux ajouter des fonctionnalités, il faudra pouvoir programer le bouzin.";
moi qui suit un peu débutant en robotique:"comment programmer une manette (emmeteur radio) et un récepteur ?"
Je pense qu'il est plus simple d'en acheté un avec 6 fonctions.
Sur la manette,il y a av/ar et d/g ;je branche av/ar sur les 2 moteurs (ceux qui ont les 2 roues),et je branche d/g sur les 2 moteurs aussi mais un des deux moteurs cette fois-ci ne tournera pas dans le même sens ,et la 3ème roue (à l'arrière) est une roue mise juste pour garder l'équilibre,rester debout,elle pourra tourner sur elle-même pour ne pas gêner le fait que le robot tourne.
ps:Tu me dis " Si tu veux ajouter des fonctionnalités, il faudra pouvoir programer le bouzin.";
moi qui suit un peu débutant en robotique:"comment programmer une manette (emmeteur radio) et un récepteur ?"
Je pense qu'il est plus simple d'en acheté un avec 6 fonctions.
- seb2d2 aime ceci
Si tu veux sortir de l'ombre,retire ton chapeau.
#15
sky99
-
- Membres
-
- 271 messages
Habitué
- Gender:Male
Posté 02 mai 2013 - 08:45
Effectivement,je ne peux pas récupérer la manette et le récepteur de la voiture,mais si j'achète ou récupère un émetteur 6 fonctions,là je n'aurais rien à programmer.Par contre pour transformer le système à 4 roues en un système à 3 roues,c'est jouable,ensuite il ne me manquerai plus que 3 fonctions à metre sur mon robot : charger,tirer (canon électro-magnétique qui se charge en 14 secondes) et scier [j'ai choisi le robot de combat,car je pense que le robot singe sera trop compliqué].
Sur la manette,il y a av/ar et d/g ;je branche av/ar sur les 2 moteurs (ceux qui ont les 2 roues),et je branche d/g sur les 2 moteurs aussi mais un des deux moteurs cette fois-ci ne tournera pas dans le même sens ,et la 3ème roue (à l'arrière) est une roue mise juste pour garder l'équilibre,rester debout,elle pourra tourner sur elle-même pour ne pas gêner le fait que le robot tourne.
ps:Tu me dis " Si tu veux ajouter des fonctionnalités, il faudra pouvoir programer le bouzin.";
moi qui suit un peu débutant en robotique:"comment programmer une manette (emmeteur radio) et un récepteur ?"
Je pense qu'il est plus simple d'en acheté un avec 6 fonctions.
Je veux bien que tu achetes une commande ayant 6 fonctions. Le problème c'est que ta commande va emettre des signaux bien précis. De l'autre coté de cette commande, il y aura un récepteur qui écoutera ces signaux bien précis, et ignorera tout le reste.
Du coup si tu as une voiture radio commandée avec avant, arrière, gauche, droite, et que tu utilises une commande gérant 2 fonctions de plus, ben la voiture télécommandée n'en aura que faire.
D'une façon ou d'une autre, il faut programmer ton récepteur pour écouter les commandes.
Donc partant du principe que tu utilises une base de voiture téléguidée, en gardant l'électronique, les moteurs, la télécommande et le récepteur, tu pourra faire les fonctions prévues, et rien de plus. Acheter une commande gérant plus de trucs n'y changera rien.
Si tu ne veux pas programmer, la seule solution, ce serait soit de trouver un jouet radio commandé avec plein de fonctionnalités au départ, et hacker ces fonctionnalités (par exemple la tourelle d'un tank jouet activerait le mouvement d'un bras, l'allumage de phares peut devenir l'allumage d'une scie circulaire -en utilisant des transistors pour amplifier le signal-, et divers trucs du genre), soit de prendre plusieurs jouets télécommandés, et agglutiner plusieurs télécommandes. Dans ce cas là, reste à voir si ça ne fera pas d'interférences entre les télécomandes, ou si tu n'as pas intérêt à acheter un robot plus évolué qui fera mieux pour moins cher.
Bref, c'est bien plus compliqué de "hacker" une télécomande si on ne connait pas le protocole radio utilisé, et de toutes façons il faudra bien reprogrammer le récepteur.
Et si tu as peur d'envisager de faire une télécomande sans fil, tu peux faire une télécomande filaire.... c'est vraiment pas compliqué, il suffit de quelques boutons, et tu pourra actionner toutes les fonctionalités de ton choix.
Quand à la version sans fil, tu peux la faire depuis ce point de départ facilement.
Bref, les racourcis c'est bien, mais il n'y en a pas toujours
 Dans ton cas, ton idée me semble plus longue/complexe que de faire un truc toi même.
Dans ton cas, ton idée me semble plus longue/complexe que de faire un truc toi même.
Mon site principal : http://www.nagashur.com/ (format blog, un wiki y est aussi)
Mon profil sur hackaday.io : https://hackaday.io/sky99 (hackerspace en anglais, j'y ai plein de projets)
Mon Github : https://github.com/sarinkhan/
#16
seb2d2
-
- Membres
- 99 messages
Membre
- Gender:Male
Posté 03 mai 2013 - 09:25
Salut sky99;
tu me dis:"soit de prendre plusieurs jouets télécommandés, et agglutiner plusieurs télécommandes. Dans ce cas là, reste à voir si ça ne fera pas d'interférences entre les télécomandes";
oui,c'est ce que je comptais faire ,je pense que 2 télécommandes à deux fréquences différentes et deux récepteurs différents devraient faire l'affaire.Le soucis est que déjà il faut les avoir ou les trouver,et qu'il y aura 2 mannette et deux antennes,il faudra rebricoller ça pour pas que ça fasse dégeulasse.Mais j'avoue que ce serait mieux de programmer
tu me dis:"D'une façon ou d'une autre, il faut programmer ton récepteur pour écouter les commandes."
COMMENT ?
tu me dis également:"Bref, les racourcis c'est bien, mais il n'y en a pas toujours Dans ton cas, ton idée me semble plus longue/complexe que de faire un truc toi même"
Un truc moi-même ?Tu veux dire me construire ma mannette ?Si ca revient moins chère de "hacker" une ou plusieurs votures défaillantes qui finiront à la poubelle ,alors je le ferais.
tu me dis:"soit de prendre plusieurs jouets télécommandés, et agglutiner plusieurs télécommandes. Dans ce cas là, reste à voir si ça ne fera pas d'interférences entre les télécomandes";
oui,c'est ce que je comptais faire ,je pense que 2 télécommandes à deux fréquences différentes et deux récepteurs différents devraient faire l'affaire.Le soucis est que déjà il faut les avoir ou les trouver,et qu'il y aura 2 mannette et deux antennes,il faudra rebricoller ça pour pas que ça fasse dégeulasse.Mais j'avoue que ce serait mieux de programmer
tu me dis:"D'une façon ou d'une autre, il faut programmer ton récepteur pour écouter les commandes."
COMMENT ?
tu me dis également:"Bref, les racourcis c'est bien, mais il n'y en a pas toujours
Dans ton cas, ton idée me semble plus longue/complexe que de faire un truc toi même"Un truc moi-même ?Tu veux dire me construire ma mannette ?Si ca revient moins chère de "hacker" une ou plusieurs votures défaillantes qui finiront à la poubelle ,alors je le ferais.
- seb2d2 aime ceci
Si tu veux sortir de l'ombre,retire ton chapeau.
#17
Melmet
-

- Modérateur
-
- 1â¯526 messages
Membre chevronné
- Gender:Male
Posté 03 mai 2013 - 01:33
Tu veux faire simple sans trop te prendre la tete: HobbyKing
Il y a des télécommandes avec les récepteurs. Le tout est programmable.
Apres c'est le prix qui risque de pas te plaire.
Tu regarde un peux toutes les télécommandes et ça va te plaire a mon avis.
Jespère avoir réussis a te guider.
Il y a des télécommandes avec les récepteurs. Le tout est programmable.
Apres c'est le prix qui risque de pas te plaire.
Tu regarde un peux toutes les télécommandes et ça va te plaire a mon avis.
Jespère avoir réussis a te guider.
#18
seb2d2
-
- Membres
- 99 messages
Membre
- Gender:Male
Posté 03 mai 2013 - 04:17
Salut Melmet,effectivement,les prix ne me plaisent pas vraiment.Par contre je n'essaie pas de faire simple mais faire avec les connaissances que j'ai ou que les membres de ce site pourraient m'apporter.
- seb2d2 aime ceci
Si tu veux sortir de l'ombre,retire ton chapeau.
#19
Melmet
-
- Modérateur
-
- 1â¯526 messages
Membre chevronné
- Gender:Male
Posté 03 mai 2013 - 04:26
Ben justement, y a des choses a apprendre avec ses telecommandesSalut Melmet,effectivement,les prix ne me plaisent pas vraiment.Par contre je n'essaie pas de faire simple mais faire avec les connaissances que j'ai ou que les membres de ce site pourraient m'apporter.

regarde un peux a cela et dit nous si tu peut trouver ton bonheur.
Apres, y a discutions
#20
seb2d2
-
- Membres
- 99 messages
Membre
- Gender:Male
Posté 04 mai 2013 - 10:54
Effectivement,si j'avais de l'argent je m'achèterais le "HobbyKing HK6S 2.4Ghz FHSS 6Ch Tx & Rx (Mode 2)".
Je pense que ce qu'il y a à apprendre là dessus c'est comment le programmer avec un pc.
En "hackant" 2 jouets télécommandés (capable de supporter la tension et l'intensité voulu),ça me reviendrait non seulement moins chère et rien n'est à programmer.Je ne garantie pas qu'avec cette solution,le travail sera aussi propre .
En ce moment,je suis entrain de voir les pertes qu'il peut y avoir si on met les batteries des moteurs dans la commande et qu'on contrôle les moteurs par des ondes,les pertes sont énormes ;mais je peux encore y travailler dessus et le robot serait allégé comme ça.
Voir cette vidéo:
(Il y a une deuxième page)
Je pense que ce qu'il y a à apprendre là dessus c'est comment le programmer avec un pc.
En "hackant" 2 jouets télécommandés (capable de supporter la tension et l'intensité voulu),ça me reviendrait non seulement moins chère et rien n'est à programmer.Je ne garantie pas qu'avec cette solution,le travail sera aussi propre .
En ce moment,je suis entrain de voir les pertes qu'il peut y avoir si on met les batteries des moteurs dans la commande et qu'on contrôle les moteurs par des ondes,les pertes sont énormes ;mais je peux encore y travailler dessus et le robot serait allégé comme ça.
Voir cette vidéo:
(Il y a une deuxième page)
- seb2d2 aime ceci
Si tu veux sortir de l'ombre,retire ton chapeau.
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




