Je suis en train de redessiner (une énième version  ) du châssis de l'UGV sans articulation et en tenant compte de l'utilisation de chenilles, je n'ai pas les dimensions du moteur avec encodeur, d'ailleurs ils ne sont même ni au catalogue de Superdroid ni au catalogue du fabricant donc je crois que ça va être dur d'avoir la vitesse du robot
) du châssis de l'UGV sans articulation et en tenant compte de l'utilisation de chenilles, je n'ai pas les dimensions du moteur avec encodeur, d'ailleurs ils ne sont même ni au catalogue de Superdroid ni au catalogue du fabricant donc je crois que ça va être dur d'avoir la vitesse du robot  .
.
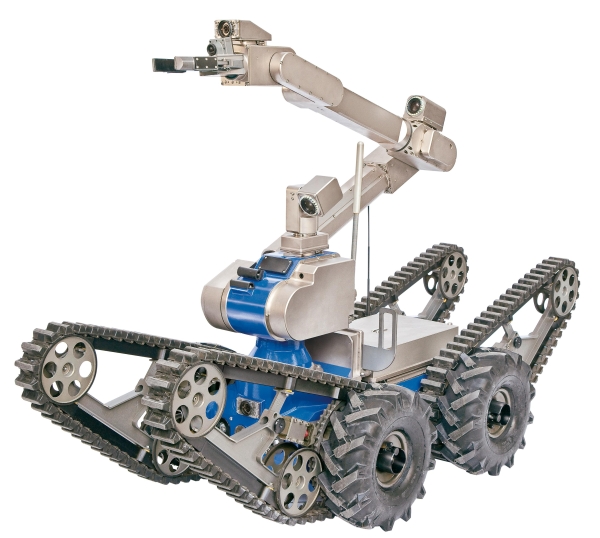
Mais en version 6 roues.
Cet après-midi dans mon atelier j'ai trouvé ça :

Je me suis dit que je devrais construire mes vérins électriques (plutôt que de mettre 6 à 700€ par vérin).
J'hésite entre une tige filetée "normal" et une vis trapézoïdale, je ne cherche pas la précision mais que ça résiste à un effort (charge) important.
Comme j'utilise des motoréducteurs je n'ai pas besoin d'un rapport de réduction aussi important que celui de la photo, surtout que la petite poulie n'accepte pas le diamètre de l'axe du moteur.


 )
)