

 Mon contenu
Mon contenu Non spécifié
Non spécifié





J'y avait pas pensé mais c'est vrai que vu le prix ça pourrait être bien  Ça me permettrait de bidouiller un peu, me familiariser avec les quadrupèdes en attendant que le plus grand soit opérationnel
Ça me permettrait de bidouiller un peu, me familiariser avec les quadrupèdes en attendant que le plus grand soit opérationnel
- Oracid aime ceci
 Posté par
- 17 novembre 2018 - 09:35
Posté par
- 17 novembre 2018 - 09:35
J'y avait pas pensé mais c'est vrai que vu le prix ça pourrait être bien Ça me permettrait de bidouiller un peu, me familiariser avec les quadrupèdes en attendant que le plus grand soit opérationnel
Posté par
- 17 novembre 2018 - 11:20
Avec énormément de retard, voilà l'illustration en stl :
L'idée c'est d'avoir la même pièce de chaque côté et non une pièce en forme d'étrier. Ca m'éviterait d'avoir à réimprimer les 4 pièces en question, mais je ne sais pas si c'est viable ?
De toute façon je vais devoir refaire le premier segment donc au pire c'est pas très grave
Posté par
- 07 novembre 2018 - 06:19
En fait le but est de tout faire de À à Z sur ce robot, je ne cherche pas la performance mais plutôt me faire la main et acquérir les bases dans les différents domaines de la robotique. Du coup c'est très lent et je fais plein d'erreurs c'est sûr ^^. Pour la modélisation ça me permet d'apprendre à utiliser les logiciels de CAO, découvrir l'impression 3d aussi. Et en me trompant ça me permet de comprendre pourquoi les pièces doivent être en U par exemple, plutôt que de reprendre un fichier 3d sans me poser la question.
Posté par
- 01 novembre 2018 - 03:41
Merci pour vos réponses C'est bien ce que je pensais, du coup je reste sur 6 pattes, tant pis !
Du coup tu utilises quand même les rivets mécaniques sans le caoutchouc ? Si je ne met pas les rivets les vis sont trop fines et passent au travers :/
En fait ce sont les toutes petites vis que j'utilise sur les têtes en plastique qui me pose problème, j'ai fait quelques photos pour montrer le problème :
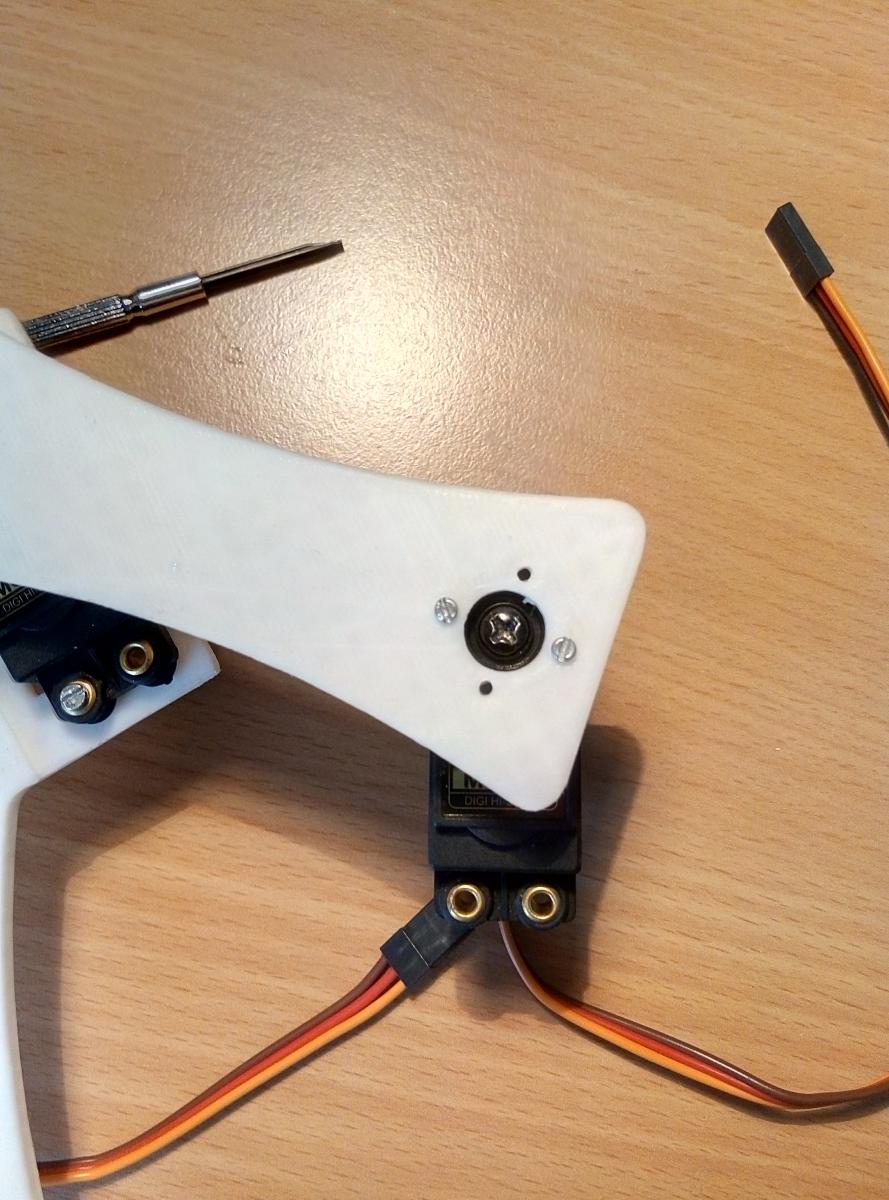
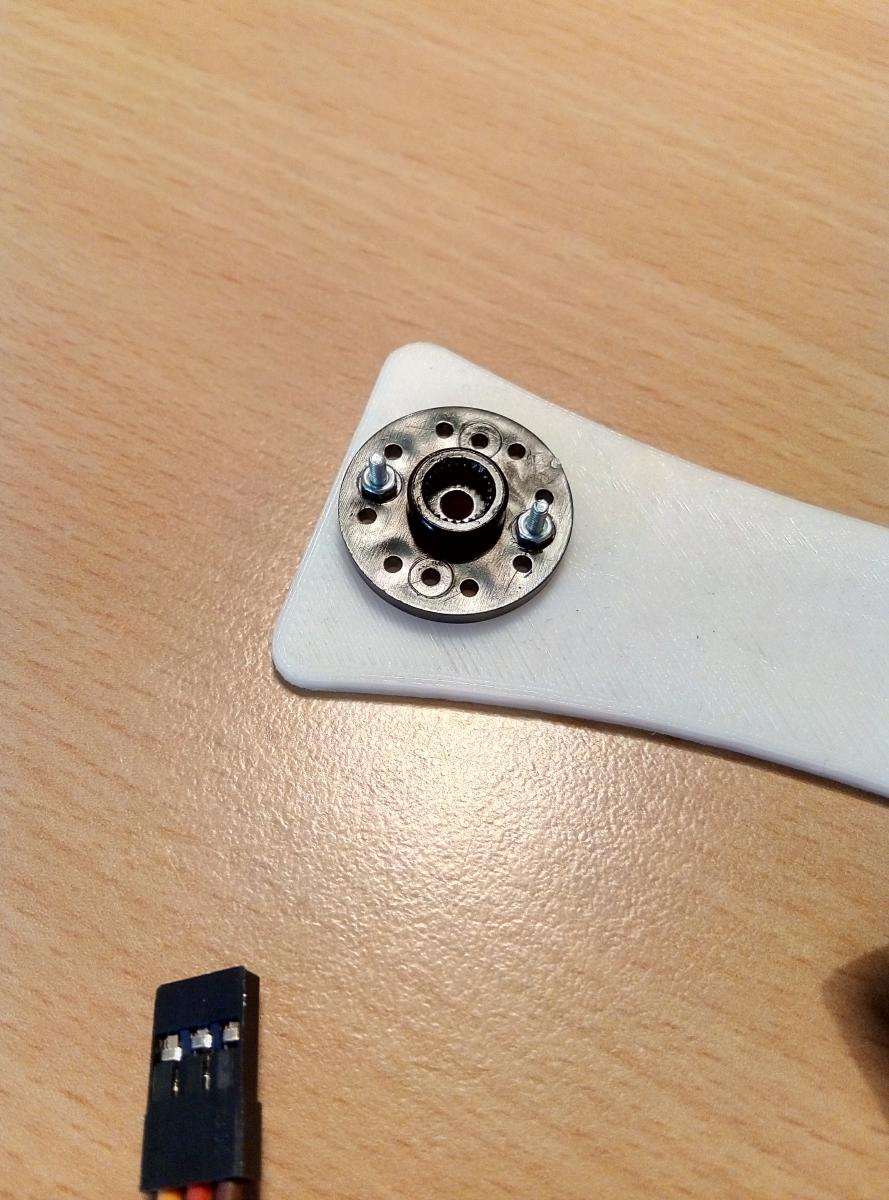
L'idée ce serait de mettre des petites rondelles à cet endroit ?
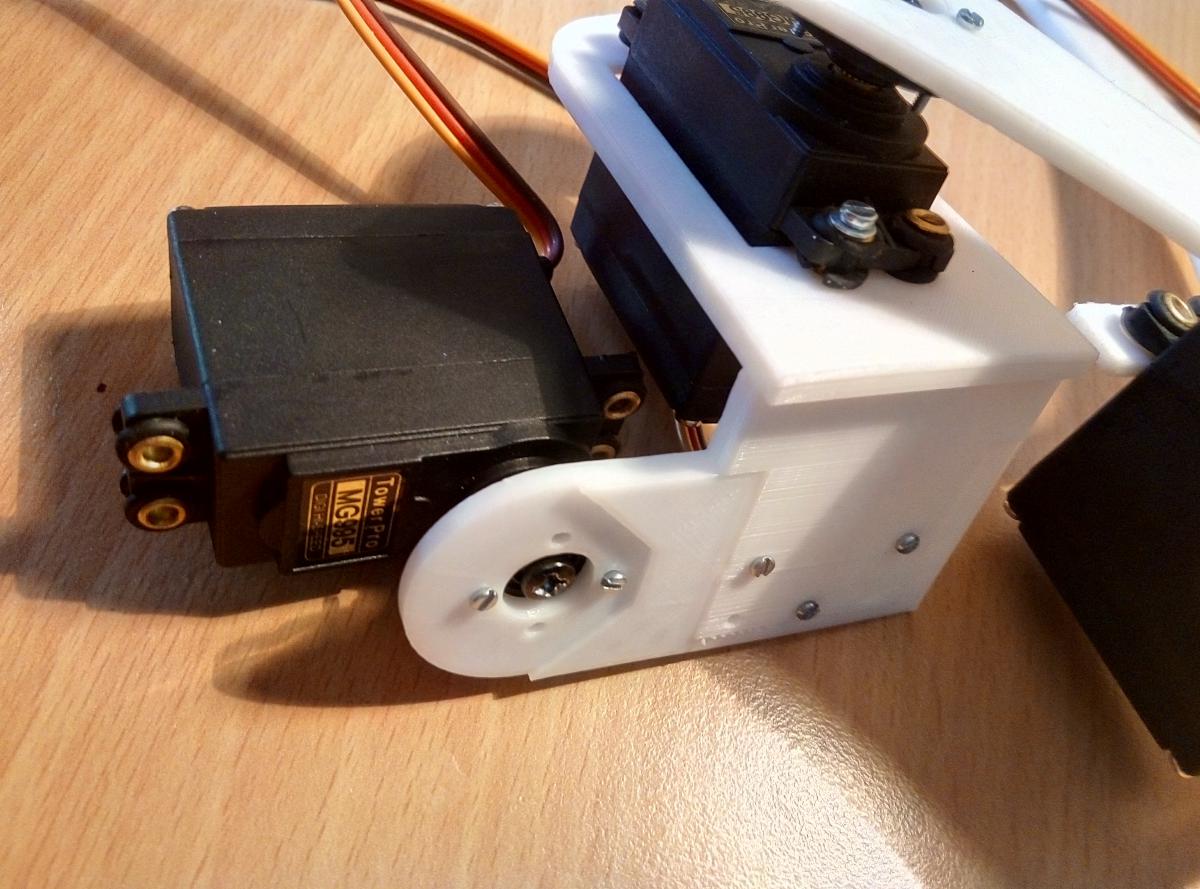
Du coup j'en ai profité pour prendre quelques photos d'une patte, ça a un peu changé par rapport à la première version :
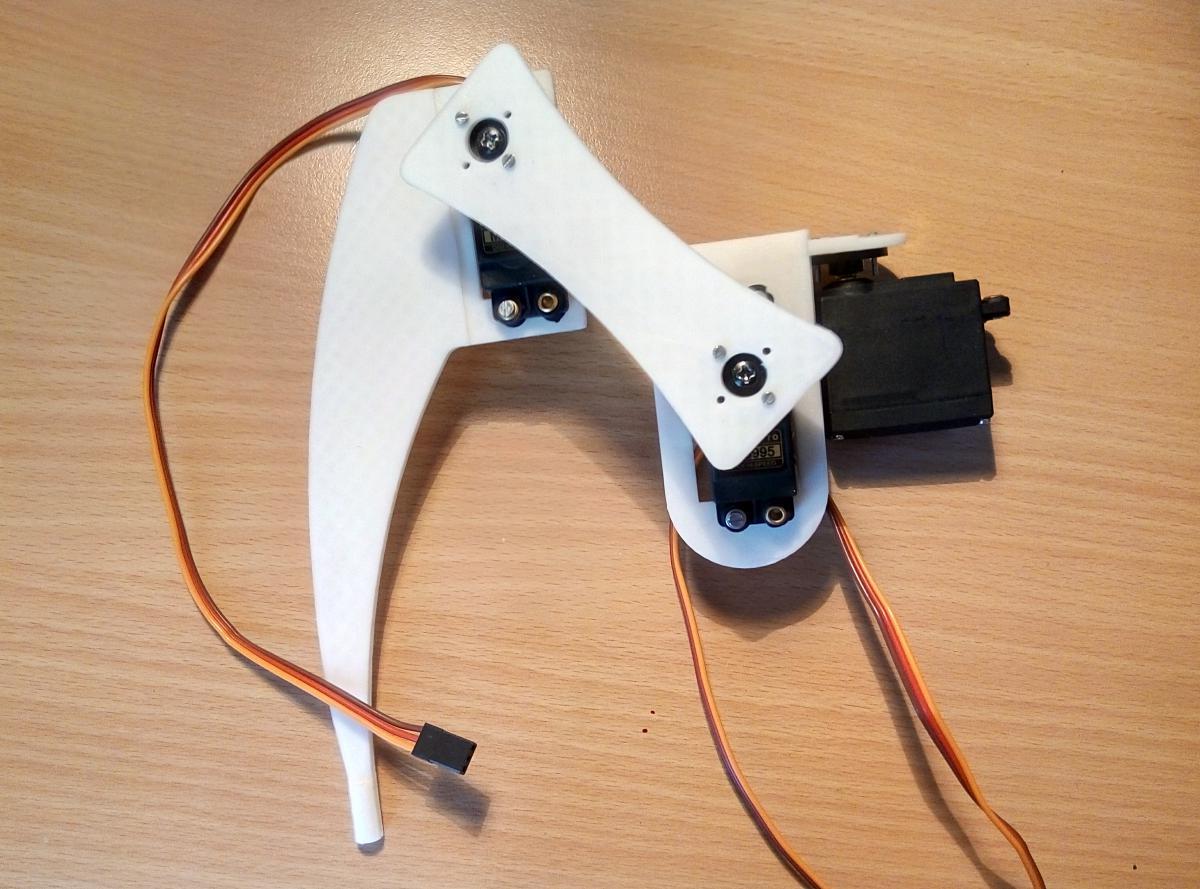
Le premier segment :
Pour le cable jack je veux bien, ça m'arrangerait beaucoup ! De toute façon je dois refaire une commande d'ici peu ^^ Merci pour la proposition !
EDIT : le fichier stl :
Les trous sur la face sont prévus pour 2 alarmes de batterie lipo, 1 interrupteur et quelques leds. Je rajouterais peut-être un trou pour pouvoir connecter l'arduino en usb sans tout démonter.
Sur les côtés, le rectangle est prévu pour fixer les servos au corps, le trou circulaire c'est juste pour passer les câbles. Je compte rajouter un couvercle, il n'est pas encore modélisé
Posté par
- 31 octobre 2018 - 11:48
Bonsoir à tous !
Après une grosse pause pour cause de budget, je suis de retour avec mon projet !
Pour résumer mon avancement, j'ai modélisé et imprimé tout ce qu'il faut pour les pattes, le corps est modélisé, je n'ai plus qu'à l'imprimer ! Côté programmation c'est difficile d'avancer tant que le robot n'est pas monté, mais j'ai déjà une petite idée de ce que je veux faire : en très gros, je pense commencer par contrôler le robot via un capteur infrarouge, avec seulement 4 directions possibles : avant, arrière, gauche, droite. Quand la marche sera maîtrisée, je pense passer sur un module bluetooth, pour contrôler le robot via une petite appli android (enfin c'est pas pour tout de suite...)
Ah aussi, pour économiser sur les servos je voulais commencer avec seulement 4 pattes, et monter à 6 si je ne m'en sors pas... Bonne ou mauvaise idée à votre avis ? Je précise que si c'est nécessaire je peux faire 6 pattes, c'est pas un problème.
A part ça j'ai quelques problèmes et questions, si certains d'entre vous ont des solutions ce serait vraiment cool
1) J'ai commandé la batterie LiPo 2.2A 2S vendue sur RobotMaker, mais impossible de la brancher à ma Arduino Uno, il me faudrait un adaptateur XTC60 vers jack/USB. J'aimerais éviter de commander sur internet, quelqu'un saurait où je peux acheter ça, ou encore si il est possible de bricoler un système en attendant ? J'avoue qu'avec une LiPo j'ai peur de faire des bêtises donc j'ose pas trop..
2) Comme je le disais j'ai modélisé le corps du robot, j'ai prévu quelques trous en facade pour y placer des led/interrrupteurs. Niveau rigidité j'ai fait des parois de 2mm, c'est suffisant vous pensez ? J'aurais bien posté le stl pour vous donner une idée mais je ne sais pas comment faire :/
3) Dernière chose, j'ai monté une première patte pour voir, je peux y appliquer d'assez grosses contraintes de poids sans trop de soucis côté rigidité et moteurs, par contre les vis ont tendance à se déserrer à la longue, et les rondelles en caoutchouc fournies avec les servomoteurs MG995 pour les vis s'abîment elles aussi. Si vous avez des solutions pour ça je suis preneuse !
Voilà pour cet update, merci d'avance pour votre aide et bonne soirée !
Posté par
- 15 février 2018 - 10:11
Quelques nouvelles de l'hexapode !
J'ai donc réalisé un premier prototype de patte :

J'espérais la faire fonctionner, mais l'alimentation USB n'est clairement pas suffisante, je vais donc devoir attendre de recevoir mes batteries ^^
Mon prochain problème est maintenant l'ajout du troisième servomoteur, qui s'occupera de faire bouger la patte d'avant en arrière. Si vous avez des conseils pour cela d'ailleurs, je suis preneuse
Posté par
- 25 janvier 2018 - 06:36
Salut ! Des petites nouvelles du projet Après une journée de réflexion voici le budget complet et une première ébauche pour le chassis :
Le budget :
- 18 servos MG995 : 100€ (http://www.robot-maker.com/shop/moteurs-et-actionneurs/30-servomoteur-towerpro-mg995.html)
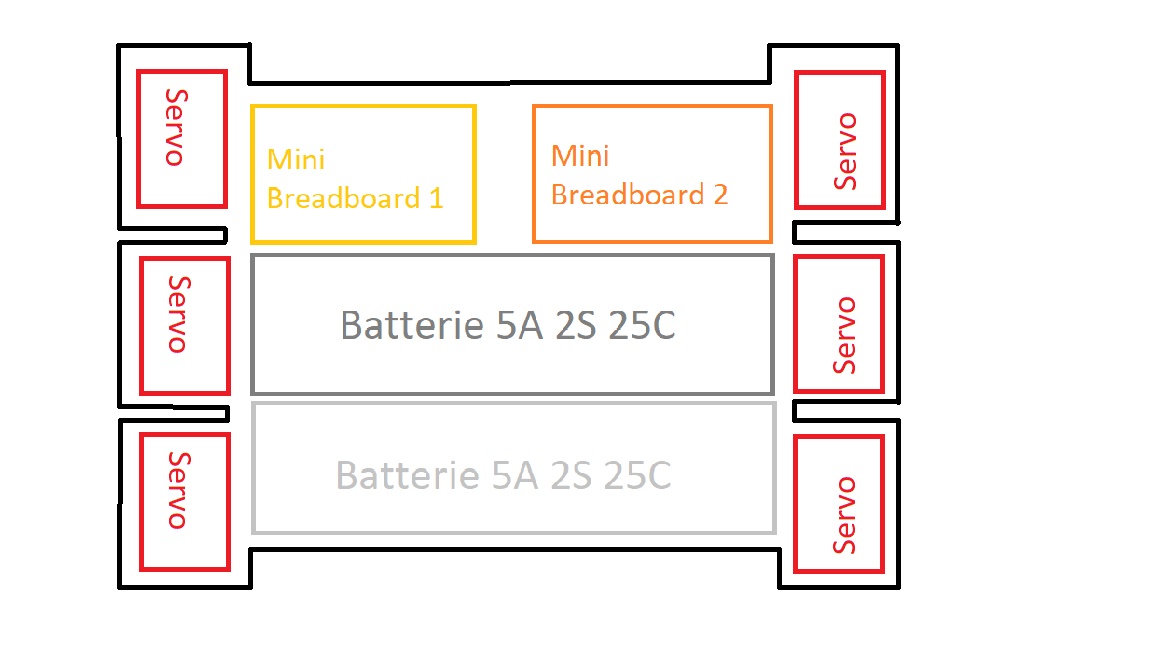
- 2 batteries LiPo 5A 2S 25C : 45€ (https://hobbyking.co...?___store=en_us)
- 2 sacs ignifugés : 5€ (https://hobbyking.co...?___store=en_us)
- Chargeur LiPo : 10€ (http://www.robot-maker.com/shop/alimentation/126-chargeur.html)
- 2 breadboards minis : 3€ (http://www.robot-maker.com/shop/accessoires-robotiques/82-breadboard-mini.html)
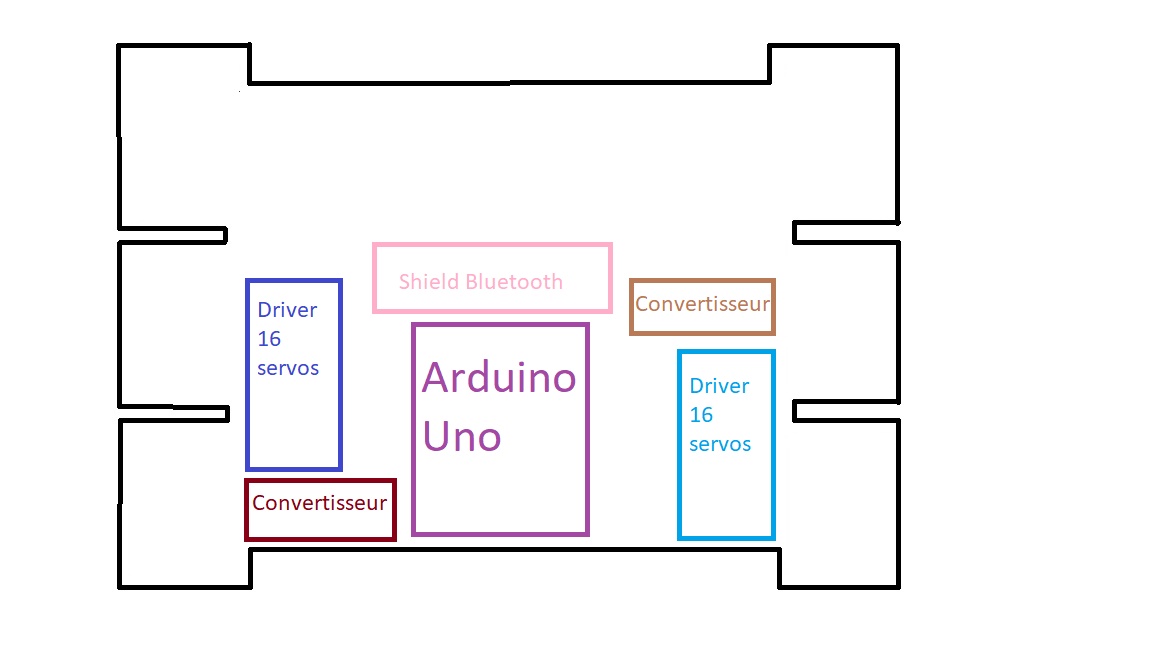
- 2 drivers 16 servos : 20€ (http://www.robot-maker.com/shop/drivers-d-actionneurs/32-driver-i2c-pour-16-servomoteurs.html)
- 2 convertisseurs 5V 7A : 20€ (http://www.robot-maker.com/shop/alimentation/74-convertisseur-5v-7a.html)
- Impression 3D : 20€
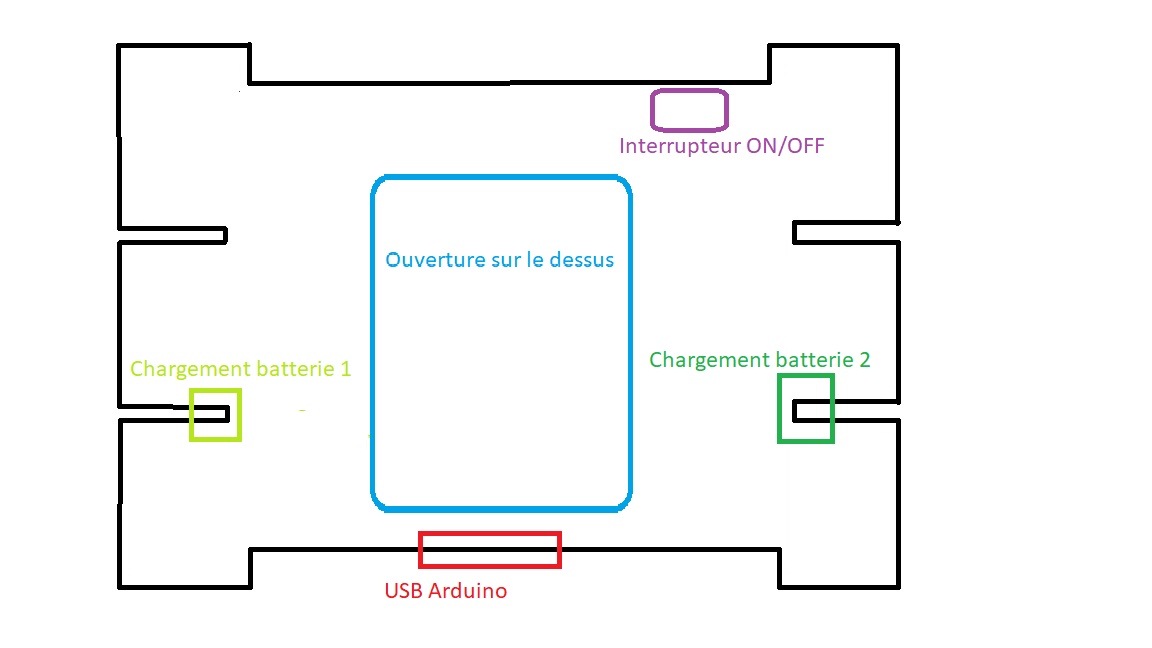
- Interrupteur ON/OFF : 1€ (http://www.robot-maker.com/shop/composants/37-interrupteur-de-puissance.html)
- 1 shield bluetooth : 25€ (pas de lien pour l'instant)
- Nappe 40 fils M/F : 2€ (www.robot-maker.com/shop/accessoires-robotiques/44-nappe-de-40-fils-male-femelle.html)
TOTAL : 251€
Voilà donc pour ma liste, je crois n'avoir rien oublié
Je me suis ensuite attaquée à l'organisation de mon robot et au chassis, j'ai fait quelques schémas pour mettre ça au clair :
La disposition des éléments : 1er étage
2ème étage :
Les ouvertures qui seront faites sur le dessus/les côtés; pour accéder à l'arduino, charger les batteries, mettre des interrupteurs... En noir la forme du chassis :
Ce projet commence donc à se préciser petit à petit dans ma tête ! Auriez vous des conseils ou des choses à redire concernant tout ça ? Je sais que je pose beaucoup de questions, mais j'ai peur d'oublier des choses ou de faire de grosses erreurs donc je préfère demander ^^
Concernant le chargeur : celui de la boutique me paraît bien, mais je me demande si avec 800mAh je vais vraiment réussir à charger mes batteries de 5Ah chacune...
Posté par
- 24 janvier 2018 - 11:05
Pour le budget c'est le nerf de la guerre et de toute les guerres il ce fera petit à petit. J'ai commencé par des servomoteurs de moteur qui m'ont coûter les yeux de la tête pour zéro résultats donc la partie motricité est très importante et à ne pas prendre aux rabais.
Oui, c'est en lisant les différents topics que j'ai compris que pour avoir un résultat propre mieux valait y mettre le prix, quitte à revoir mes priorités
Je me suis construit un bipede maison avec les moyens du bord puis je suis passer à un kit sur Aliexpress car plus de précisions et d'équilibrage donc à ne pas négliger les kit pour ce faire la main.
J'envisage justement de tenter mon projet sans préparation ni kit particulier, et acheter un kit si en cours de route je me retrouve dans une impasse. Mais avec le recul, cette solution te paraît-elle viable ?
Pour le poids si tu dépasse les 2kg sur ton robot c'est qu'il est assez gros donc bien calculé tes couples de servos pour avoir ce qu'il te convient pour pas dépenser inutilement.
Je pense effectivement que les MG995 (couple : 11kg/cm) sont largement au dessus de mes besoins : un couple de 5 kg/cm me suffirait.
Mais en écumant les différents sites, je me suis rendue compte que je ne trouve aucun servo moins cher que les MG995 de robot maker (hormis les microservos qui risquent de lâcher assez rapidement). Et puis j'avoue que ça me plait d'avoir de la marge sur le poids, pour peut-être ajouter des modules, expérimenter et m'amuser sur le robot final.
Après où acheter hobbyking perso trop de retour négatifs même entrepots Europe car entrepôts Russie ou pays de l'est. Sinon Aliexpress pas de soucis, amazon.fr très bien pour certain truc niveau rapidité, gotronic.fr très très rapide (entreprise en France), un peu plus cher mais de très bonne qualité et livrer en 2 jours et sinon la boutique de robot-makers.
D'accord, c'est ce que je craignais... Je vais chercher du côté des sites français dans ce cas
Dernier conseil prend du plaisir à faire ton projet commence peut être plus petit pour voir tes difficultés niveau mécanique/budget/programmation . Mais surtout prendre du plaisir et c'est cela le plus important que tu mette 1 mois ou 10 ans le plaisir n'as pas de prix.
J'ai déjà réalisé un robot sur roues pour justement commencer par de petits projets, et j'avoue que je n'ai pas d'idées sur d'autres projets plus "faciles" à faire, ou du moins rien qui me passionne réellement... Pour l'instant, même si je n'ai encore rien acheté le plaisir est là, c'est réellement agréable de réfléchir à toutes les problématiques de mon projet et leurs solutions J'essaie de me fixer des objectifs pour fragmenter un peu tout ça, même faire bouger une patte serait déjà une victoire pour moi ! Je ne peux pas savoir si ma motivation sera toujours là dans deux mois, six mois voire un an, je sais que c'est un énorme projet pour une novice mais je rêve d'un hexapode depuis longtemps, et aujourd'hui j'ai envie de me lancer.
Posté par
- 21 janvier 2018 - 10:13
Bonsoir à tous !
Comme indiqué dans le titre, je souhaite donc construire un robot hexapode Je suis plutôt débutante en robotique, j'ai donc énormément de questions, surtout au niveau de la mécanique. Voici, en vrac, quelques unes de ces questions :
1) Le robot serait de taille assez réduite, et ne dépasserait pas, dans l'idéal, les 5 kg. Je pensais utiliser pour actionner les pattes des servomoteurs MG995 (http://www.robot-maker.com/shop/moteurs-et-actionneurs/30-servomoteur-towerpro-mg995.html), avec 3 servos par patte. Le couple de ce servo est de 13kg/cm pour 6 volts, admettons que chaque patte fasse 10cm de long, chaque servo pourrait donc porter 1,3 kg, c'est bien ça ?
2) J'ai également cru comprendre que la charge du robot reposerait sur le servo des "épaules". Dans l'optique de réduire mes coûts, je me demandais donc si il serait possible de prendre un modèle de servo moins puissant pour les "coudes". Cela pourrait-il fonctionner ou non ? Je précise que j'ai déjà pensé à réduire le nombre de servos, mais j'ai peur que cela affecte la vitesse de déplacement et la "souplesse" de la marche.
3) Afin d'avoir un rendu plus propre, j'envisage d'imprimer la structure du robot (chassis et pattes) avec une imprimante 3D. Est-ce un bon choix selon vous ? Quelle est l'épaisseur minimale à avoir pour que le matériau soit suffisamment rigide ?
4) Je ne sais pas si j'ai le droit de parler des concurrents de la boutique des Makers, et si ce n'est le cas je m'en excuse. J'aimerais commander mes servos sur le site aliexpress, qui propose des tarifs très intéressants (MG995 à 2,50€ au lieu de 7.20€). Ces prix cachent-ils quelque chose ? J'ai peur de me retrouver avec des servos défectueux ou des contrefaçons, ou encore de payer d'importants frais de douane. Quelles expériences avez-vous eu avec ce genre de sites ?
5) Si je souhaite par la suite piloter mon robot via un smartphone, vaut-il mieux passer par le bluetooth ou par wifi ?
6) Je dispose actuellement d'une arduino uno, est-ce suffisant pour ce genre de projets ? J'ai cru comprendre en parcourant les topics que la marche de l'hexapode nécessite de nombreux calculs, qui doivent être faits en externe. De quelle manière ces calculs sont-ils faits habituellement ?
Voici donc les questions qui me bloquent actuellement. Ce message est assez fouillis et je m'en excuse, je me suis beaucoup renseignée sur les hexapodes, et j'avoue avoir du mal à trier toutes ces informations. Merci d'avance pour votre aide précieuse
Posté par
- 21 janvier 2018 - 07:00
Bonjour à tous !
Pour me présenter rapidement, je m'appelle Manon, j'ai bientôt 18 ans et je suis étudiante en informatique.
Je bidouille sur Arduino depuis quelques mois, j'ai déjà réalisé quelques robots simples, et aujourd'hui j'aimerais me lancer dans un projet plus ambitieux : un hexapode.
Ayant très très peu de connaissance en mécanique, je suis tombée sur ce forum en cherchant des informations. J'espère faire un bout de chemin avec vous, et bien sûr en apprendre plus sur la robotique




