Mon contenu
Mon contenu Non spécifié
Non spécifié





 Posté par
Posté par Le project est toujours en cours, malheureusement je n'ai pas beaucoup de temps à y consacrer ducoup il avance très lentement .
J'ai entrainé un agent à conduire conduire une voiture virtuelle et lui faire passer des portes dans le bon sens . Un petit bras robotique réplique les mouvements de l'agent sur la télécommande . J'aurai surment pu me passer su bras robotique mais j'aivais envie d'éssayer de conserver la vrai voiture téléguider le moins modifié possible .
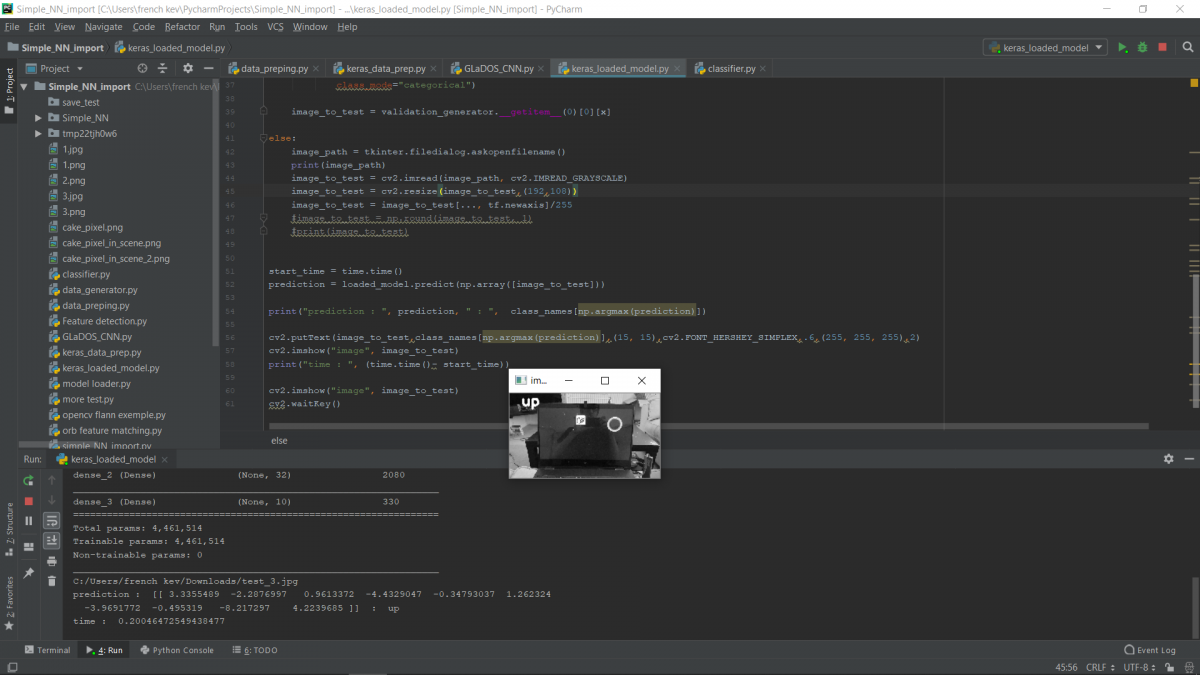
J'ai presque résolu mon problème de tracking de la vrai voiture en utilisant un system de realité virtuelle (HTC Vive) . C'est fou de voir à qu'elle vitesse on peut régler ce genre de soucis juste en dépensant de l'argent .


La prochaine étape est de donner la position de la vrai voiture à l'agent et qu'il utilise la télécommande pour la contrôler .


 ) . En général on posait quelques obstacles ou bouts de scotch au sol pour créer un circuit . Les voitures étaient équipé pneus en plastique dur pour pouvoir drifter les virages .
) . En général on posait quelques obstacles ou bouts de scotch au sol pour créer un circuit . Les voitures étaient équipé pneus en plastique dur pour pouvoir drifter les virages .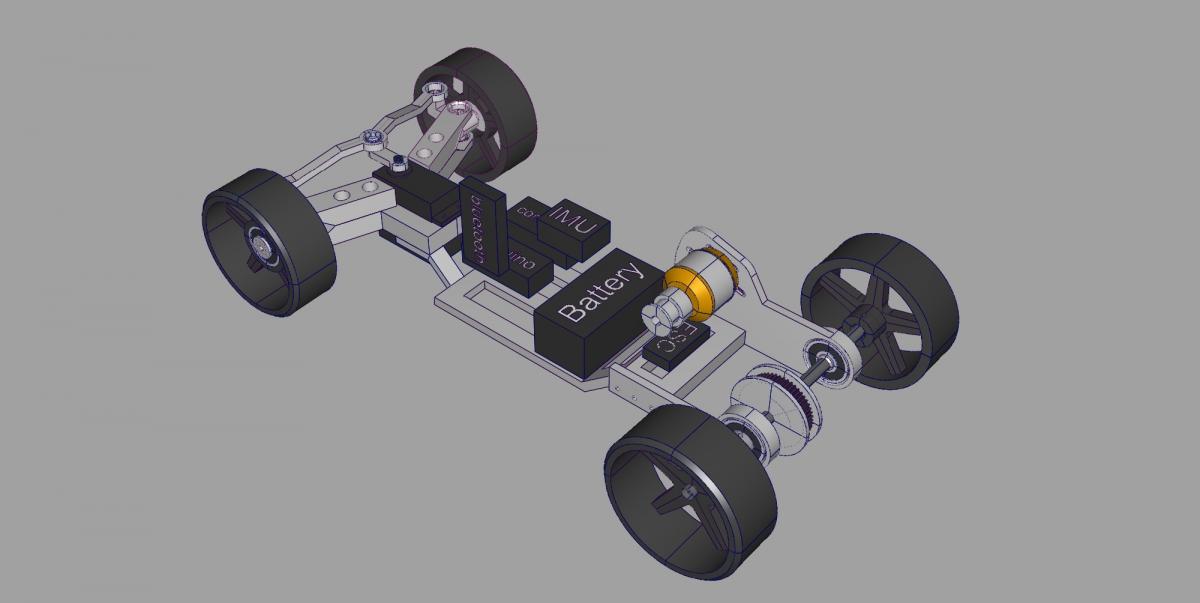




 ) .
) .