Mon contenu
Mon contenu Homme
Homme
 Posté par
Posté par Salut,
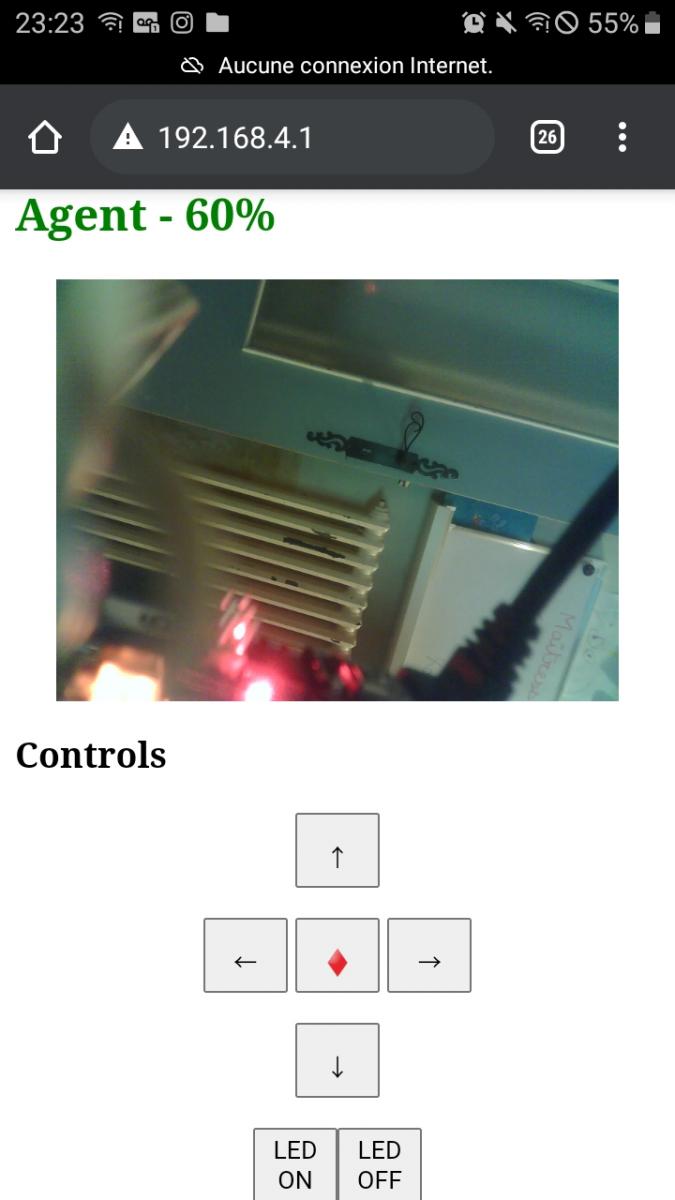
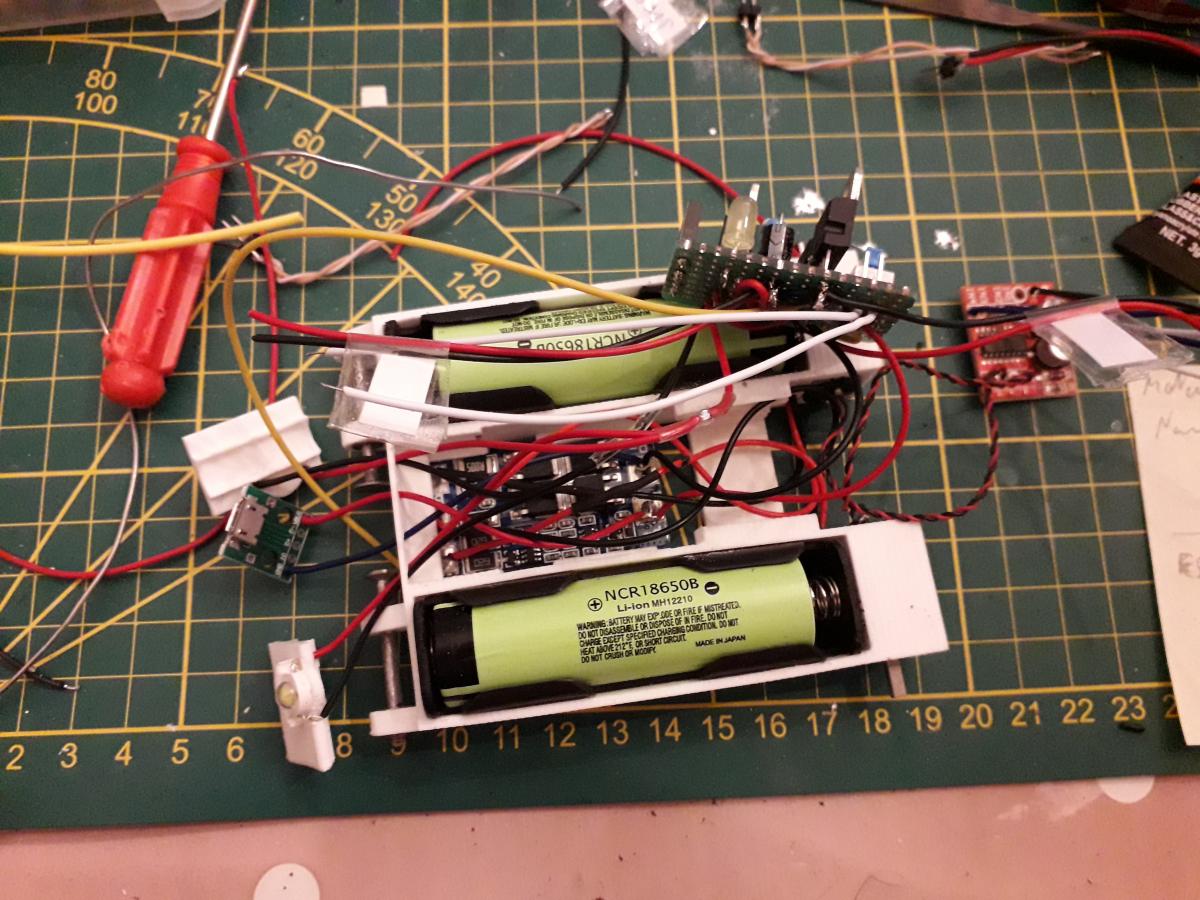
alors pour le moment, vu comme c'est dégeulasse (y a pas d'autre mot) j'assume pas... ^^
donc je vais continuer à fouiller un peu de mon côté, l'objectif étant de faire à terme un tuto et de publier le code sur RM, ou git ou un truc du genre (avec les STL sur thingiverse peut être je suis pas encore fixé...)...
mais pour le moment j'assume vraiment pas...
c'est pour cela que je me contente juste de faire des remontées sur l'état de (non)avancement 
de toute façon faut que ce soit répétable car je devrais le refaire un montage équivalent (avec une évol sur la même base software) pour un projet de hack avec mon fiston (qui fera aussi l'objet d'un tuto)...
car je rappelle qu'à l'origine ce truc est juste un POOC !
Donc je vous tiens au jus et je ne manquerais pas de vous demander un coup de main quand j'aurais vraiment épuisé toute les pistes...
++
Zav
- Romaric aime ceci