Mon contenu
Mon contenu Homme
Homme



 Posté par
Posté par Il faudra voir ce que donne ce prochain remplaçant de l'EV3, mais j'avoue que les premiers visuels ne m'engagent pas trop, effectivement plus enfantin et plusieurs fonctionnalités semblent disparaître (l'écran par exemple). Et j'avais cru voir que Lego abandonnerait LabView pour migrer sur une programmation type scratch, à l'image de ce qu'ils ont fait avec Makecode (mais j'arrive plus à retrouver ma source...).
Après j'utilise principalement l'EV3 pour faire des prototypes, car plus rapide, ou avec mes enfants.
Je suis ensuite aussi à utiliser une base arduino, mais avec de la construction Lego car, comme le dit Oracid, très puissante pour l'assemblage structure et mécanique. D'autant que j'aime bien faire et défaire.
Ensuite l'arduino n'est pas si compliqué que ça. Il faut effectivement s'y mettre un peu au début (pour ma part, j'avais fait les 2 openClassroom sur le sujet pour assimiler les bases), ensuite, cela devient effectivement beaucoup de copier-coller suivant les composants utilisés. Et puis il y a une communauté et biblio énorme et on arrive généralement toujours à trouver solution sur le net.
Sinon, il y a toujours la solution du scratch, pour programmer en blocs. Dans ce cadre, il y a le makeblock qui peut être intéressant, avec une mécanique de type meccano et une panoplie très large de composants (même si un peu cher que ce qu'on peut trouver pour de l'arduino classique). S'orienter dans ce cas sur le kit type mBot Ranger qui comprend la carte Me Auriga qui a plus de ports. Et il très facile de pouvoir imprimer toute sorte de pièces adaptables. Cela peut être une bonne transition entre l'EV3 et le monde de l'arduino.
- Oracid aime ceci
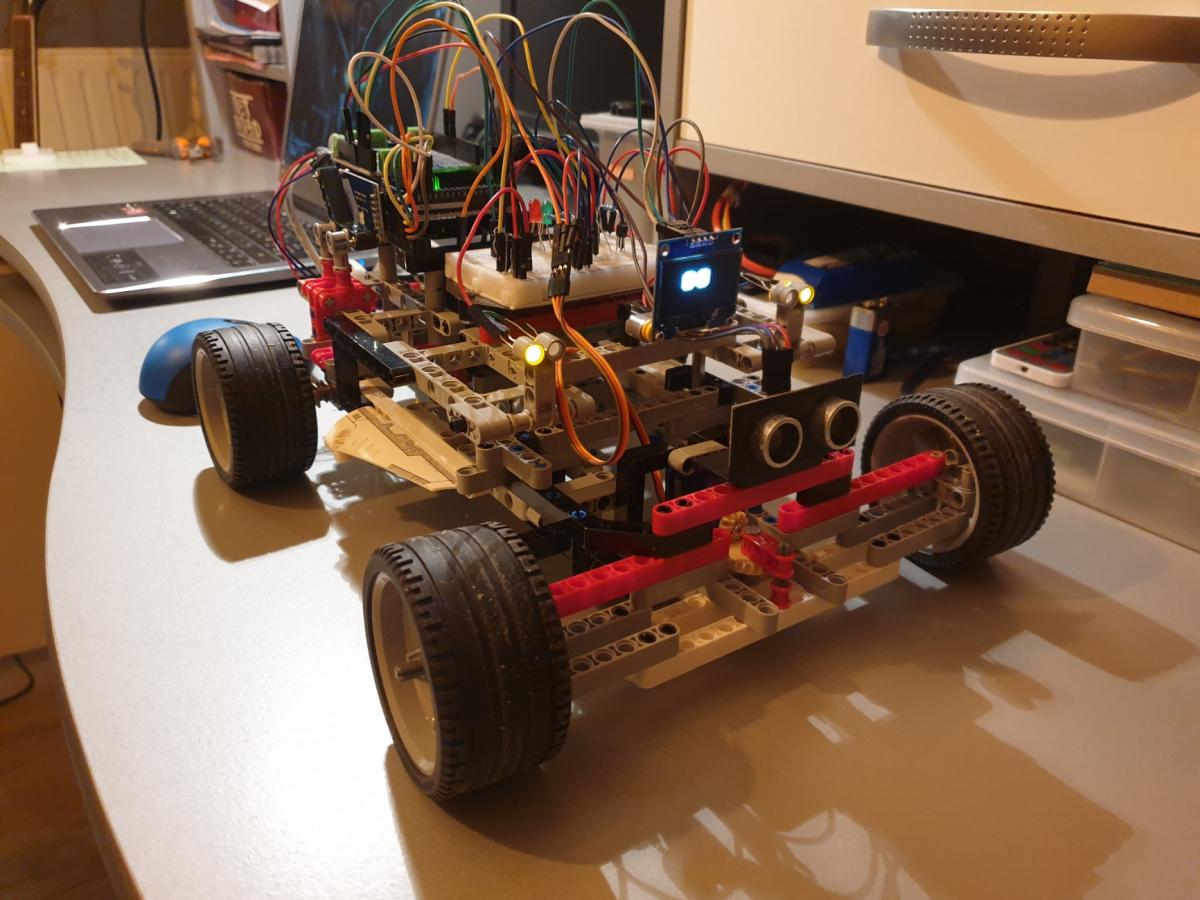
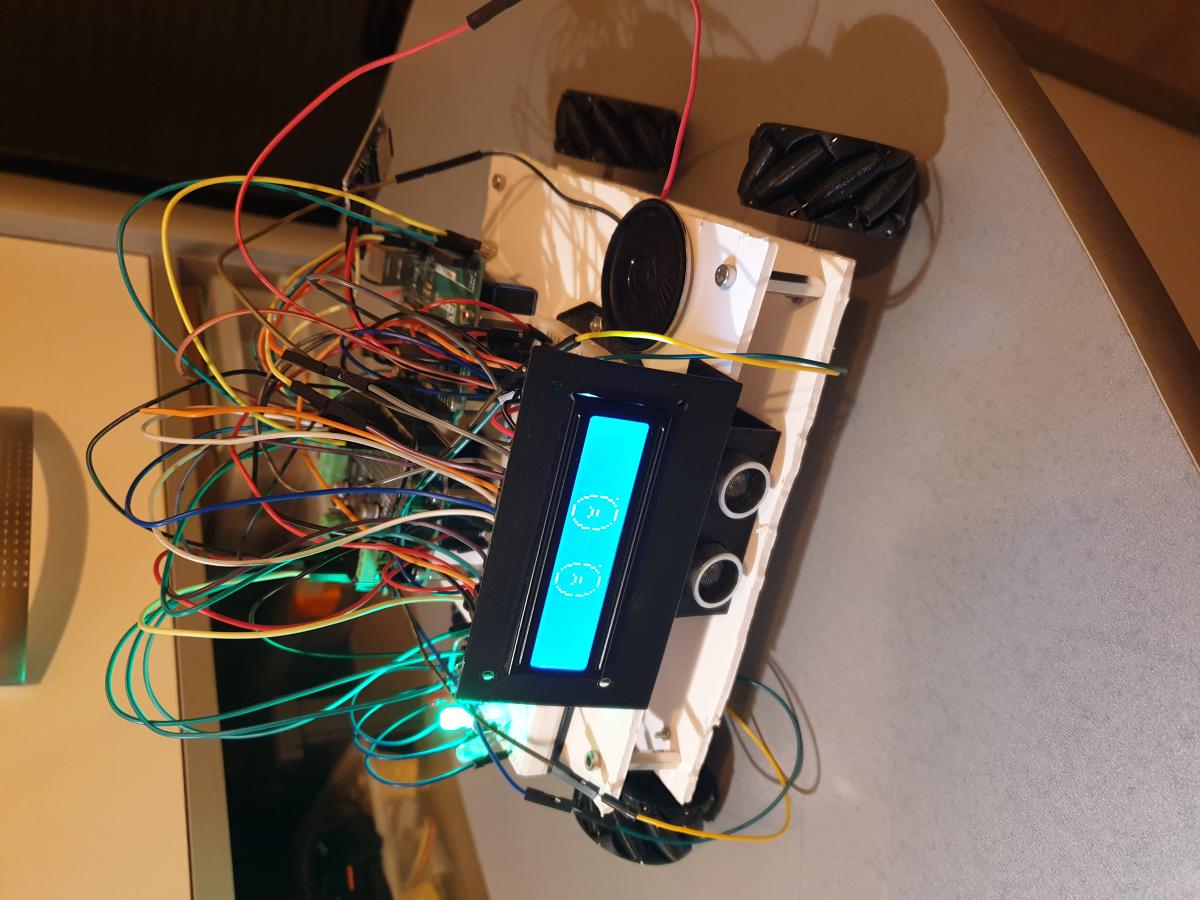
 et je suis satisfait du résultat obtenu, ce qui me donne une bonne base pour continuer. Je pense faire évoluer le projet pour le rendre plus autonome et je souhaite le doter d'une pince. Je retravaillerai le design également, ça ne ressemble pas à grand chose pour l'instant
et je suis satisfait du résultat obtenu, ce qui me donne une bonne base pour continuer. Je pense faire évoluer le projet pour le rendre plus autonome et je souhaite le doter d'une pince. Je retravaillerai le design également, ça ne ressemble pas à grand chose pour l'instant  , mais ce n'était pas le but... Je laisserai de côté pour cette seconde phase le son et les yeux qui restent gadgets.
, mais ce n'était pas le but... Je laisserai de côté pour cette seconde phase le son et les yeux qui restent gadgets.