Mon contenu
Mon contenu Homme
Homme
 Publié
Publié
Elle sera réalisée grâce à un petit circuit que l'on appelle circuit RC.

Sommaire :
1. Introduction
2. Réalisation
3. Conclusion
Introduction
Le but d'une temporisation est de retarder l'activation d'une action. C'est pourquoi on parle de temporisation au travail.
Je vais vous donner un petit exemple.
Soit le circuit suivant :
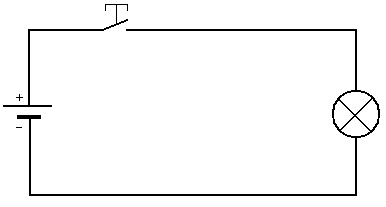
Par défaut la lampe est éteinte, et lorsque l'on ferme le bouton poussoir, elle s'allume immédiatement.
Maintenant, imaginons que pour X raison, on veuille que la lampe ne s'allume que 5 secondes après la fermeture du bouton poussoir.
Pour cela, on va réaliser une temporisation.
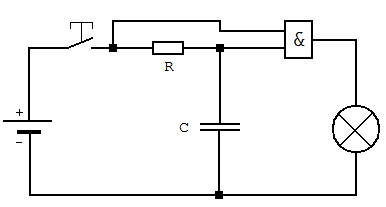
On a alors le circuit suivant :
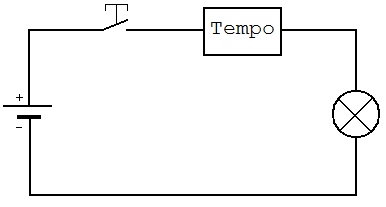
 Mais que mettre dans la case "Tempo" ? ...
Mais que mettre dans la case "Tempo" ? ...Réalisation
Dans notre case "Tempo", nous allons nous servir d'un circuit RC et d'une porte logique ET.
Comme son nom l'indique, un circuit RC est composé d'une résistance ® et d'un condensateur ©.
Voici donc à quoi va ressembler notre case "Tempo" :
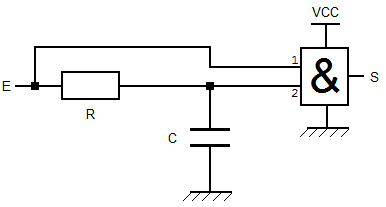
La plupart du temps, pour la porte ET, nous nous servons d'un circuit intégré CMOS 4081.
Explications :
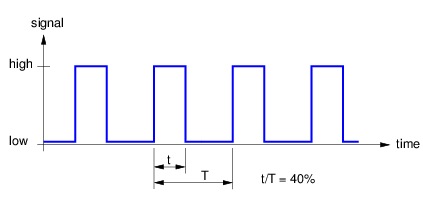
Lorsque l'entrée E passe à l'état logique "1" (c'est à dire lorsque un signal arrive), l'entrée 1 de la porte logique ET passe à l'état "1" également. Mais le condensateur C n'étant pas chargé, il absorbe la quasi-totalité du courant, et l'entrée 2 de la porte logique reste à l'état "0".
Plus cela va et plus le condensateur se charge, il absorbe donc de moins en moins de courant et ainsi, une tension de plus en plus forte arrive à l'entrée 2 de la porte logique.
Lorsque la valeur de cette tension atteint Vcc/2 (Vcc étant la tension d'alimentation de la porte logique), l'entrée 2 passe à l'état "1" et donc la sortie S également : notre temporisation est terminée.
Comment agir sur la durée de temporisation ?
Vous l'aurez compris, avant que la deuxième entrée de la porte ET passe à "1", il faut que le condensateur se charge, ce qui prend un certain temps. Et selon la capacité du condensateur (exprimée en Farads), la durée de charge sera plus ou moins longue.
Le premier facteur à agir sur la durée de temporisation est donc la capacité du condensateur.
La durée de charge d'un condensateur dépend également de la quantité de courant qui lui arrive. Et cette quantité de courant varie en fonction de la valeur de la résistance R. Ainsi plus la valeur de la résistance est grande, plus la durée de temporisation est élevée.
La valeur de la résistance et donc le deuxième facteur à agir sur la durée de temporisation.
Une formule permet de calculer la durée de temporisation en prenant en compte ces deux facteurs :

avec :
T = durée de temporisation en secondes
Ln = logarithme népérien
R = valeur de la résistance en Ohms
C = capacité du condensateur en Farads
 Ln(2) est environ égal à 0.7, donc on retient généralement la formule ainsi :
Ln(2) est environ égal à 0.7, donc on retient généralement la formule ainsi : 
Conclusion
Pour conclure, nous allons donner une solution à notre problème !

Nous avons le circuit général ainsi que ce qui va dans la case tempo, il ne nous reste plus qu'a fusionner les deux :
Il nous reste une dernière chose à faire, et c'est probablement la plus importante : le calcul des valeurs de la résistance et du condensateur.
Nous voulons 5 secondes de temporisation.
Donc on reprend notre formule et on a :

Ensuite on se fixe l'une des deux valeurs. Par exemple on s'impose un condensateur de 1000 microFarads (1*10^-3 Farads)
On a donc :

Il ne nous reste plus qu'a résoudre l'équation :
 Ohms.
Ohms.Nous utiliserons donc un condensateur de 1000µF et d'une résistance de 7,1KΩ.
Ce circuit nous fournira une temporisation d'ENVIRON 5 secondes. En effet, les valeurs des résistances et des condensateurs vendus dans le commerce possèdent une certaine marge d'erreur. Ainsi une résistance vendue avec une valeur de 100Ω ne fournira peut-être que 98Ω. Idem pour les condensateurs. Donc si vous désirez avoir une temporisation d'une durée très précise, il faudra envisager une autre solution technique, l'utilisation d'un micro-contrôleur par exemple.Voilà, ce tutoriel est terminé, et j'espère qu'il vous aura plut.
Maintenant, vous êtes en mesure de réaliser une temporisation d'une certaine durée grâce à un circuit RC.
Et si vous avez des questions, n'hésitez pas à les poser sur le forum ...
- TREExpari aime ceci