Mon contenu
Mon contenu Non spécifié
Non spécifié




tu veux pas les mettre en stream sur Twitch pour rentabiliser ? ^^
- Little french kev aime ceci
 Posté par
- 15 juillet 2020 - 09:04
Posté par
- 15 juillet 2020 - 09:04
Posté par
- 20 mai 2020 - 10:05
Posté par
- 17 mai 2020 - 04:57
Voilà une chaîne Youtube d'un Japonais que je viens de découvrir :
 Kikkosha thedoorintos
Kikkosha thedoorintos
Il a essentiellement fait des automates bipèdes mais certains sont motorisés et même contrôlable.
Son site internet :
http://mpm.sakura.ne.jp/newmpm.htm
Son premier modèle automate PR-1 :
http://translate.google.com/translate?sl=ja&tl=fr&u=http%3A%2F%2Fmpm.sakura.ne.jp%2Fivent-pr1.htm
Construction d'un automate :
Evolution de ses automates en 5 ans (2010-2015 de PR-1 à PR-7) :
http://mpm.sakura.ne.jp/ivent-pr00.htm
PR-9 :
http://translate.google.com/translate?sl=ja&tl=fr&u=http%3A%2F%2Fmpm.sakura.ne.jp%2Fivent-pr9.htm
BB-1 (Board Bot) en panneaux MDF :
PR-10 Titan, un automate à en perdre la tête :
Au contraire MMBB-1 (Motorized Mini Board Bot) donc le plus petit et motorisé :
MBB‐1 un peu plus grand :
Son premier robot MPR-1 (Motorized Paper Robot) :
Il vient donc après PR-9 et avant PR-10. Il est contrôlable via une appli Android.
http://translate.google.com/translate?hl=&sl=ja&tl=fr&u=http%3A%2F%2Fmpm.sakura.ne.jp%2Fmpr1.htm
Ses différentes solutions de bipédie :
http://translate.google.com/translate?hl=&sl=ja&tl=fr&u=http%3A%2F%2Fmpm.sakura.ne.jp%2Fivent-wd.htm
Des kits PR-3, PR-5 et BB-1 sont en vente ici : http://translate.google.com/translate?sl=ja&tl=fr&u=http%3A%2F%2Fmpm.sakura.ne.jp%2Fmenue.htm
Une partie des fichiers pour PR-3 : http://translate.google.com/translate?sl=ja&tl=fr&u=http%3A%2F%2Fmpm.sakura.ne.jp%2Fpr3sample.htm
Arbre généalogique de ces bipèdes :
http://mpm.sakura.ne.jp/image/ivent/ivent-evo.pdf
Posté par
- 17 mai 2020 - 03:12
ça marche d'abord dans ta têtePar contre j'ai une question : comment marche les articulations sur les robots ?(hanches,genoux,coudes) parce que j'ai beau chercher sur internet je ne trouve pas
 les articulations d'un robot marchent en fonction de tes moyens et de ton imagination. On peut te montrer 15 bipèdes différents avec chacun des articulations au fonctionnements différents.
les articulations d'un robot marchent en fonction de tes moyens et de ton imagination. On peut te montrer 15 bipèdes différents avec chacun des articulations au fonctionnements différents.
Posté par
- 04 mai 2020 - 11:15
Il a une bonne bouille, la tête intègre des capteurs ?
Il me fait penser au Transformers SchockWave...

Posté par
- 02 mai 2020 - 07:11
On verra bien, pour encore un bon moment il sera statique.
Petits test :
Plus de détails plus tard.
Posté par
- 02 mai 2020 - 02:54
Bonjour,
Je me suis présenté ici ; https://www.robot-ma...ntation-xb2000/
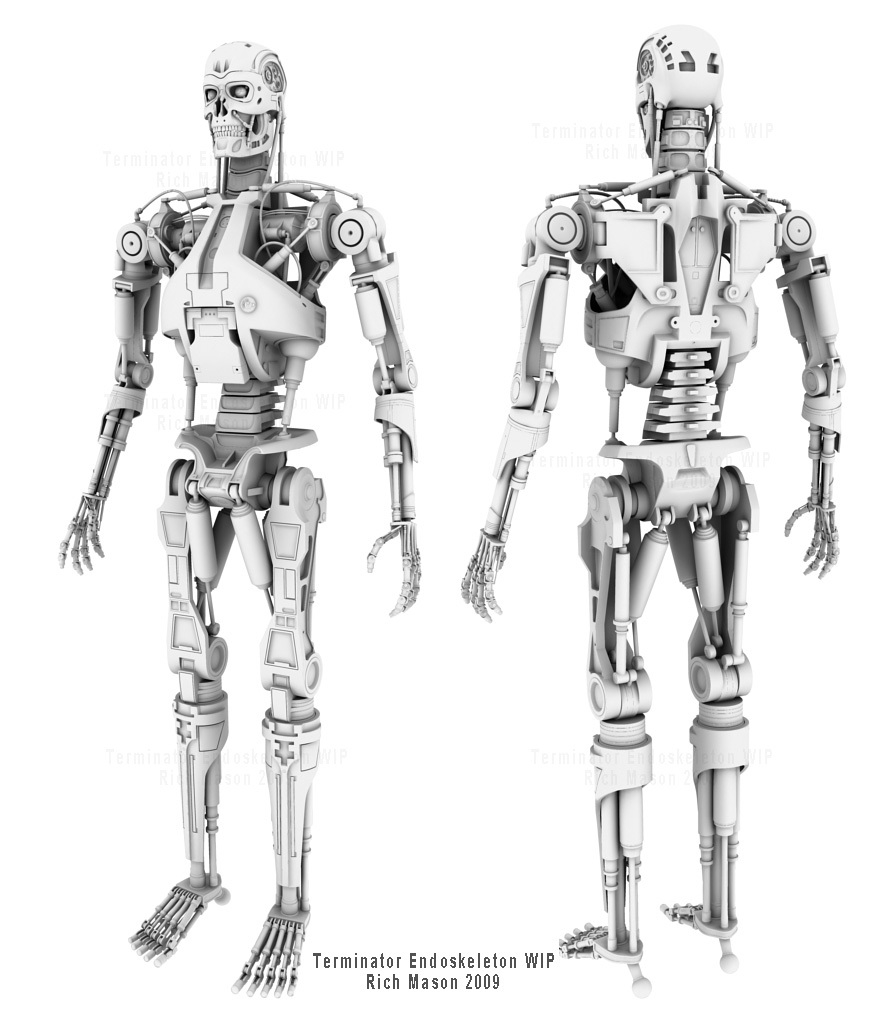
En tant que super fan de Terminator et Terminator : Le Jugement Dernier, je voudrais pour 2029 ; une année importante pour la saga, puisque c'est celle d'où viennent les protagonistes du futur ; rendre hommage aux deux premiers films de la franchise. L'hommage ultime, un vrai Terminator série 800 modèle 101, "imprimé en 3D" en titane et capable d'agir comme dans les films (mais pas de tuer). Mais avant cela, il y aura un prototype, fait de matériaux composites et dont l'intelligence artificielle proviendra de données open source.
Qu'est-ce que j'en ferais ? Tout et n'importe quoi, surtout n'importe quoi. Je rêve un jour de le faire participer à un concours de cosplay :
- Vous êtes déguisez en quoi ?
- En humain...