Mon contenu
Mon contenu Homme
Homme





Perso j'aurais plus peur de cette télécommande... un truc qui te parle, avec un petit voyant rouge...


ça datte de 68 ton truc ! ça ne fait plus peur à personne . . . 

- Forthman aime ceci
 Posté par
- 22 janvier 2025 - 11:08
Posté par
- 22 janvier 2025 - 11:08
Perso j'aurais plus peur de cette télécommande... un truc qui te parle, avec un petit voyant rouge...
ça datte de 68 ton truc ! ça ne fait plus peur à personne . . .
Posté par
- 22 janvier 2025 - 07:41
Posté par
- 21 janvier 2025 - 02:39
Je trouve cela plus ingénieux, plus poétique, plus écologique, plus apaisant, plus économique, plus futuriste, plus romantique, plus moderne , que n'importe quelle fusée de 100m des mégalos milliardaires.
Tu dis cela parce que tu es en colère.
Moi, la conquête spatiale, qu'en j'était enfant, c'est ce qui a fabriqué mon mental et mon intérêt pour la science.
Alors, malgré tout, je suis encore bon public.
Posté par
- 17 janvier 2025 - 09:00
ils sont juste rentrés en force avec un serrage de 2 centièmes
Pour une telle précision, faut du matos . . .
Posté par
- 17 janvier 2025 - 08:07
Posté par
- 13 janvier 2025 - 02:24
This is of course all present in @oracid's designs.
Yes !
Posté par
- 10 janvier 2025 - 09:26
Posté par
- 09 janvier 2025 - 04:07
Et étant donné qu'il est monotâche le fait de faire des delay n'est pas optimal d'après ce que j'ai compris.
Là, je ne peux rien t'en dire.
J'ai fait une petite recherche sur YouTube. Il semblerait que la bibliothèque VarSpeedServo s'ajoute au dessus de Servo.h et est utile au cas où on a plusieurs servos qui vont à des vitesses différentes. Ce qui, en effet, peut être intéressant, me semble t-il, même si tu n'as qu'un seul servo.. Voici une vidéo : https://youtu.be/t4K...4NEwkvbfgeO_3GW
Posté par
- 08 janvier 2025 - 02:30
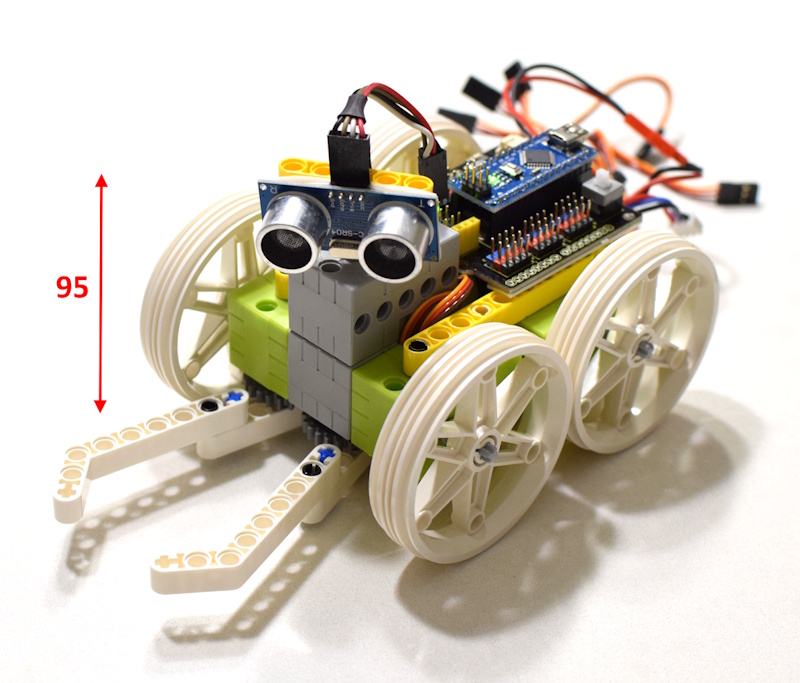
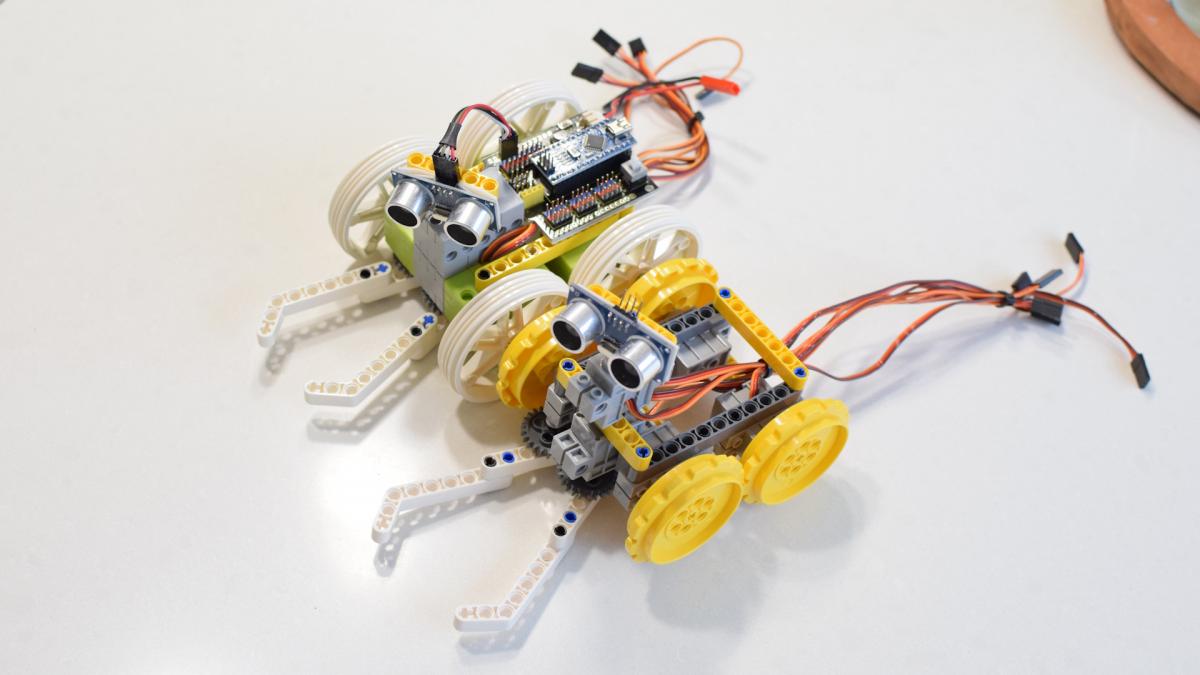
Voici une réalisation similaire avec les petits GeekServo.
Le gros problème de ces servos est qu'ils ont des défauts d'alignements avec les Lego Technic.
En raison de ces problèmes d'alignements, par exemple, les roues frottent les unes contre les autres.
De plus, ces servos ont un petit axe sortant (male), alors que l'usage sur les servos et moteurs Lego est d'avoir un axe rentrant (femelle). Cela permet d'utiliser un axe de la longueur désirée. Ici, les roues ne tiennent pas en raison de la petite taille de l'axe.
Sur la première photo, vous remarquerez que les roues avant ne touchent pas le sol. Il faudrait prendre de plus grandes roues. Mais dans ce cas, il faudrait augmenter la longueur, et alors, l'utilisation de petits servos n'aurait plus aucun intérêt.
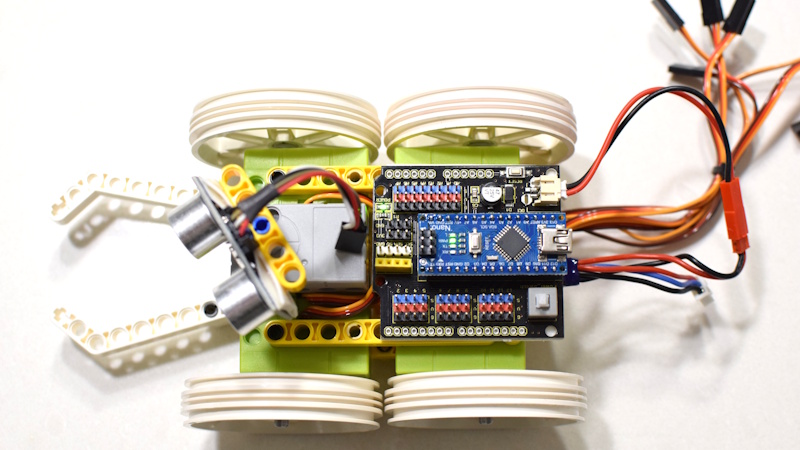
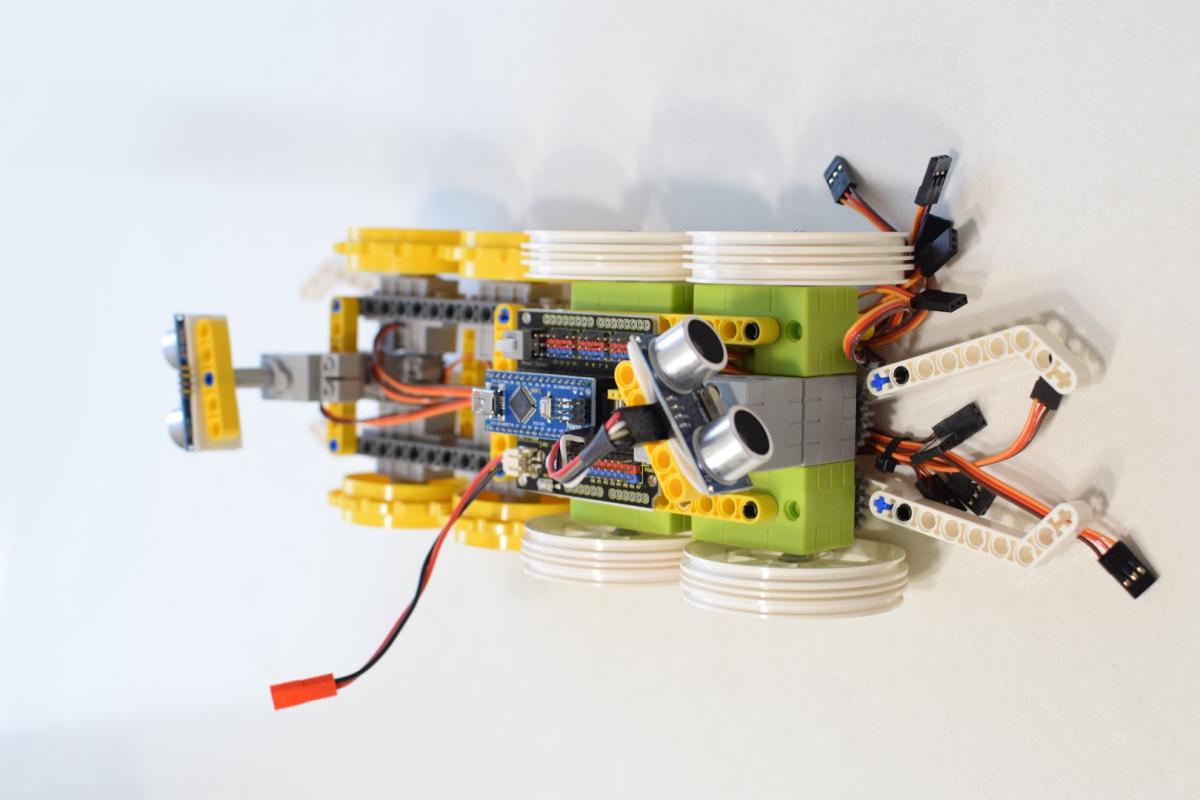
Sur la deuxième photos, ont a un comparatif des deux réalisations.
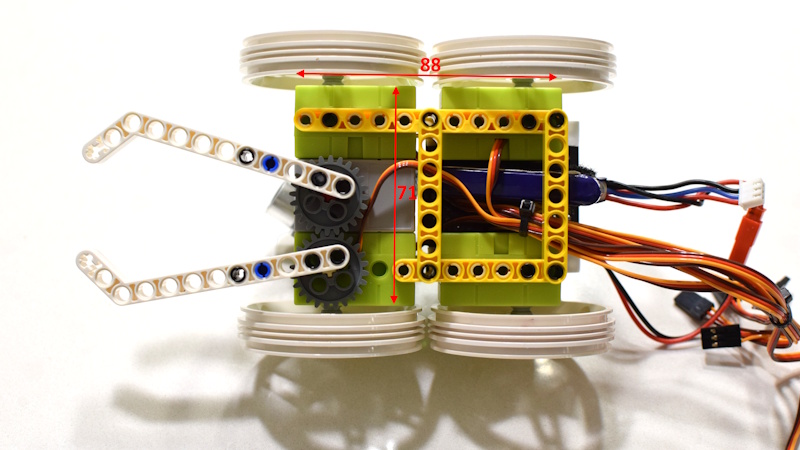
Sur la quatrième image, on peut constater que la voie est quasi égale entre les deux réalisations.
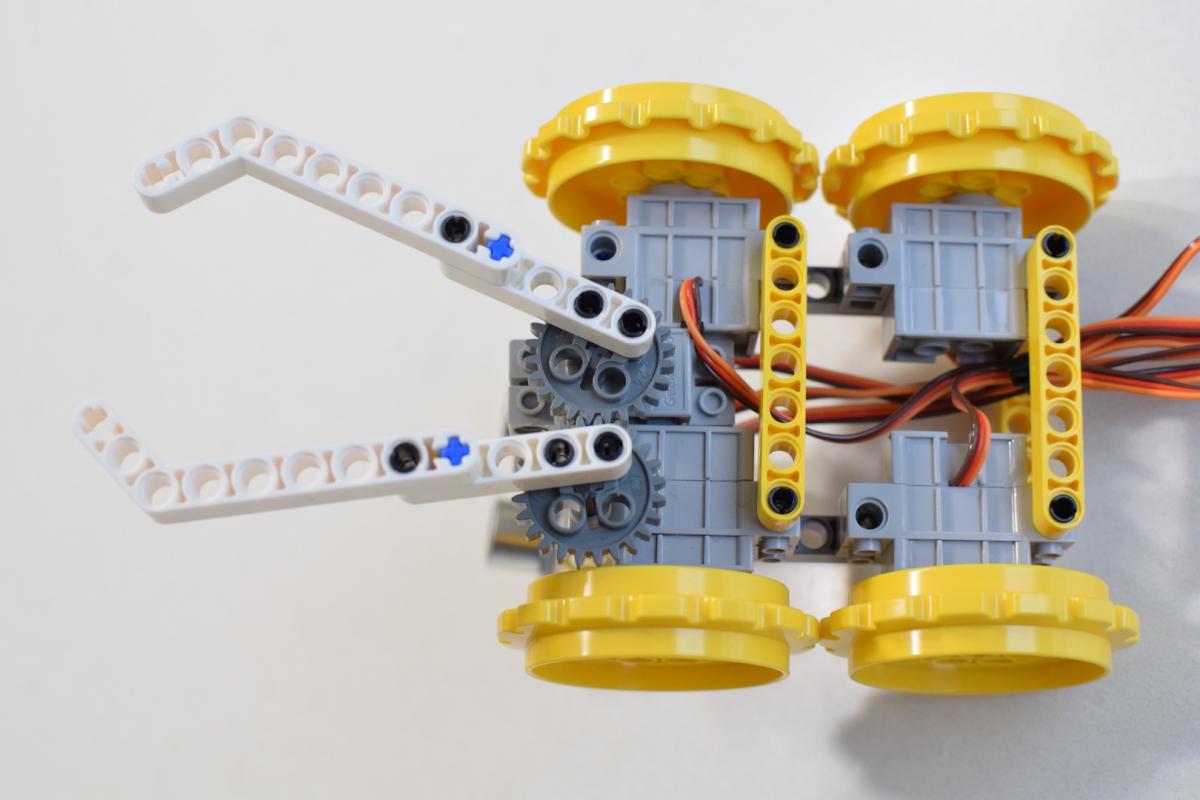
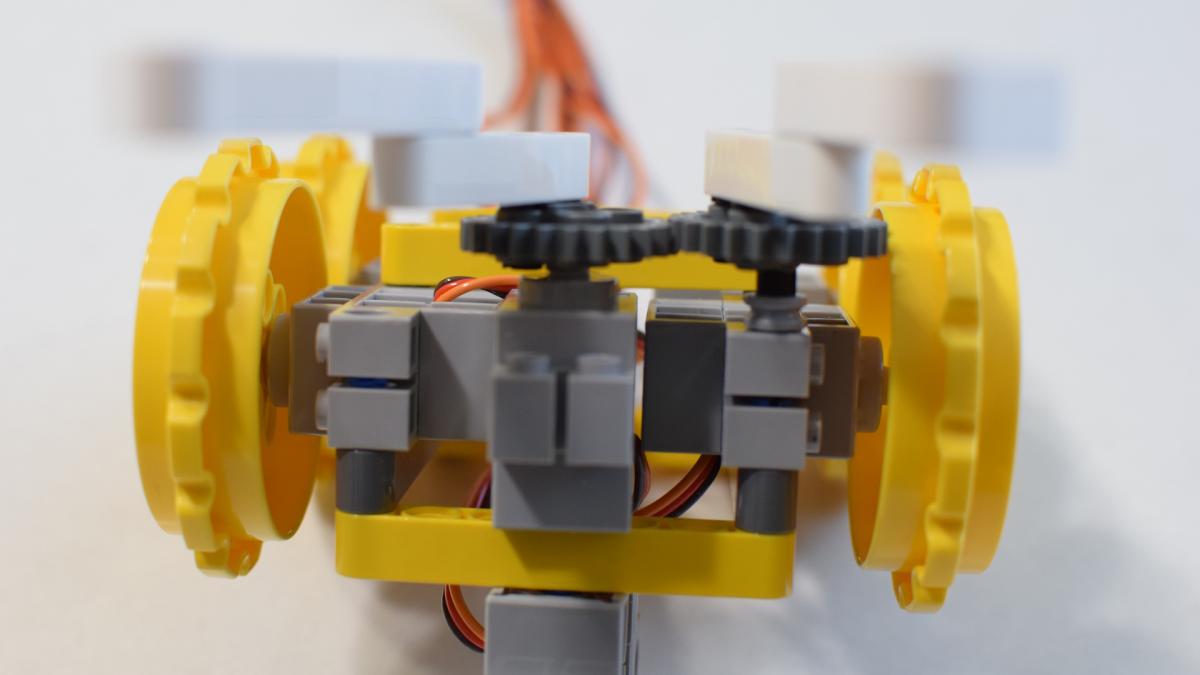
Sur la cinquième image, encore un problème d'alignement, un des axes de la pince nécessite une entretoise spécifique et la roue dentée touche la roue.
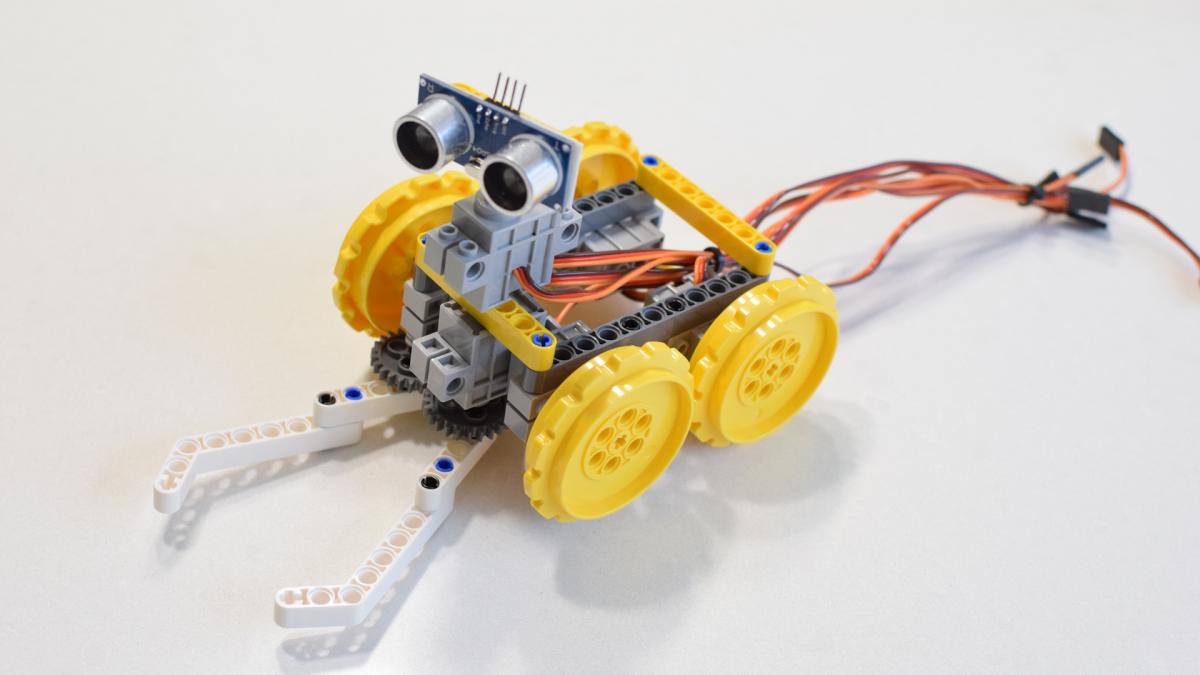
Au final, ce montage est catastrophique et rien ne tient vraiment.
A vous de juger.
Posté par
- 05 janvier 2025 - 10:30
J'ai été agréablement surpris par les résultats de mes tests du micro servo 9iMOD-11kg, d'autant que son prix est d'environ de 15€ à partir de 3 pièces. Cela le situe en bonne place pour un micro servo de référence.
https://fr.aliexpres...ayAdapt=glo2fra
Ce servo a une plage d'action de 180° ou 270° et fonctionne de 4.8V à 8.4V. Il pèse 22g.
J'ai mesuré un couple de 4,25kg.cm ce qui le situe au même niveau que le GDW RS0708 qui est plus cher.
Celui que j'ai reçu était parfaitement calibré et je n'ai pas eu besoin de modifier la plage de largeur d'impulsion de 500µs à 2500µs.
J'ai également mesuré sa vitesse à 80ms pour 60°. Pour effectuer cette mesure, j'ai utilisé un potentiomètre qui fait varier un délai. Je vérifie le déplacement du servo en visuel, mais également avec un doigt qui détecte que le palonnier atteint bien les extrémités des 60°. Cette méthode est un peu empirique, mais le résultat est très proche de ce qui est annoncé par le fabriquant, 80ms contre 70ms.
Un détail qui a son importance, la vis de maintient du palonnier a un diamètre de 2,5mm. Ce type de vis de toutes longueurs est très courant et facilite grandement le montage d'un palonnier fait maison. Pour mémoire, la vis du GDW RS0708 (de Hongkong) à une mesure anglaise ou américaine. Introuvable, chez nous.
Caractéristiques :
- tension de 4.8V à 8.4V
- type micro servo
- plage de 180° ou 270°
- poids 22g
- couple 4,25kg.cm
- vitesse 80ms/60°
- câble 26cm

Posté par
- 04 janvier 2025 - 07:40
Je vais essayer de faire la partie Lego.
Pour la motorisation, je préconise 4 GeekServos Vert à rotations continues.
Pour la tête, un GeekServo Gris. servomoteur 360° Geekservo
Pour la pince, un GeekServo Gris. servomoteur 360° Geekservo
Posté par
- 04 janvier 2025 - 07:21
Je vois sur tes vidéos que ton quadrupède frotte parfois sur les bords de la piste. Si c'est comme ça, ça simplifie le problème même si ça peut induire une perte de vitesse.
Oui, c'est un choix.
Je n'utilise aucun capteur. La piste est assez large et la distance à parcourir, 7m, permettent de s'en passer. Pour m'arrêter, j'ai une temporisation qui arrête le quadrupède.
C'est simple et cela fait gagner du temps. Par contre, pour faire le tour, j'utilise la caméra HuskyLens qui me sert de contre poids.
J'ai essayé autre chose que le trot, mais jusqu'à maintenant, je n'ai rien fait de satisfaisant.
Mon dernier quadrupède qui est beaucoup plus grand ne va pas très vite. Je suppose que c'est en raison de son poids, 950g.
Et donc, plutôt que la vitesse, je m'intéresse à la lenteur. Et bien, ce n'est pas plus facile.
Pour aller lentement, il faut étudier "la marche". J'espère y arriver en cette nouvelle année, mais ce n'est pas gagné d'avance.