

 Mon contenu
Mon contenu Homme
Homme






J'adore ces mecs, leurs robots sont vraiment top
- Forthman aime ceci
 Posté par
- 21 septembre 2020 - 12:08
Posté par
- 21 septembre 2020 - 12:08
Posté par
- 10 mai 2020 - 07:54
 ya pas mal de thèses sur le sujet donc ça va
ya pas mal de thèses sur le sujet donc ça va 
Posté par
- 10 mai 2020 - 03:45
Posté par
- 10 mai 2020 - 02:12
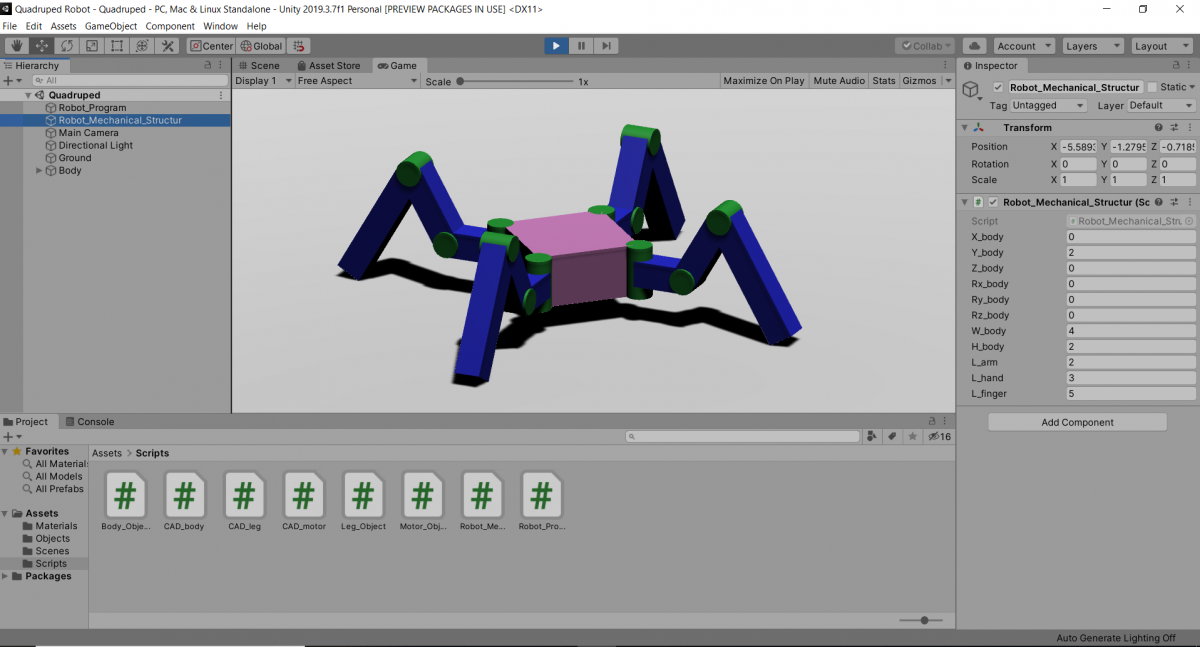
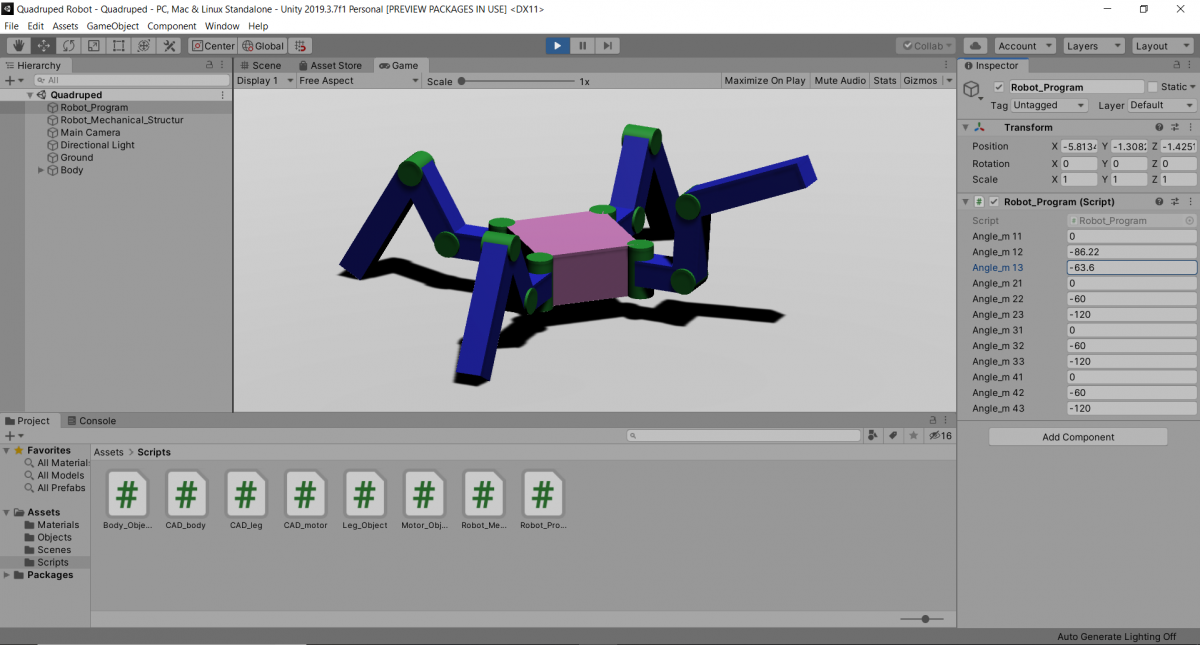
Je peux vous publier rapidement mes avancements sous unity.
J'ai pu créer une structure méca d'un quadruped sous forme d’araignée entièrement paramétrable, ou j'ai accès (comme sur un vrai robot) aux variables pilotant l'orientation de chacun des 12 moteurs.
Je bosse encore sur les équations de cinématique inverse que je pourrais directement implémenter sous unity afin de vérifier si tout fonctionne.
Ensuite je pourrais simuler un environement 3D et coder des boucles d'asservissements au robot tout ça sur le model 3D dans Unity.
L'idée ici c'est de vraiment faire toute une étude sans débourser un centime en élements mécanique.
Derrière toute la partie calcul se fera sur un ordi et je n'aurais plus qu'à envoyer au robot les orientations des différents angles (hardware embarqué très simplifié)
Posté par
- 10 mai 2020 - 12:33
Yes j'aime beaucoup ce quadruped, j'ai lu toute la doc associée, ils ont fait du bon boulot
James a une approche trop empirique du problème, y'a un moment il faut mettre certaines chose en équation afin d'optimiser les performances du robot, chose qu'il ne fait jamais. Il est très bon en éléc et soft mais manque quand même à mon gout de compétence en design mécanique. Ça ne m’empêche pas de regarder toutes ses vidéos et d'y trouver un intérêt mais je regrette qu'il ne mette pas plus d’intérêt dans le dimensionnement de ces robots.
Le fait de définir préalablement le comportement cinématique de son quadruped lui permettrait de parfaitement dimensionner ses moteurs pour son application (chose que Skyentific fait fort bien), il devrait prendre plus de temps à analyser la répartition Puissance/Couple/Vitesse de Rot afin de choisir les meilleurs moyens de transmission (ce n'est pas pour rien que le MIT utilise deux transmissions planétaires et une par courroie). Aujourd'hui il part aveuglément sur de la transmission par courroie sans se poser la question du rapport de réduction optimal. De même pour le design de ses pièces plastiques, ça reste trop carré, trop gros, trop lourd.
Le robot d'open dynamique à vraiment bénéficier de cette approche, les articulations sont compacts, tous est compris dans les segments de membre, le volume mort est réduit au maximum, la transmission des efforts est bonne, il n'y a aucun frottement (bruit) et ils ont fait une analyse cinématique qui leur a permit d'identifier les bonnes longueurs de "jambes" .
James ne s'est pas assez sérieusement posé la question de la cinématique inverse pour son projet, il faudrait avoir une approche plus matriciel du sujet, il se crée des erreurs en omettant que le contact entre son pied de robot et le sol n'est pas ponctuel, le MIT on utilisé des sphères a rajoutes des offsets à l'articulation en fonction de l'orientation générale du robot. Or cela joue beaucoup dans le fait que son robot "glisse" car les solutions de ses équations ne sont pas bonnes
Pareil sur le pilotage du bout de la jambe, son approche est encore une fois trop empirique alors qu'il faudrait déterminer l'équation de la trajectoire souhaitée et l'interpoler afin de piloter chaque itération en vitesse constante pour gagner en fluidité de mouvement
Les moteurs brushless qu'il va utiliser son (enfin) la bonne solution, pareil pour leur répartition au sein du robot (mettre le moins de poids possible dans les jambes) mais je déplore un peu le temps que ça lui a pris d'arriver à cette conclusion et je pense qu'il n'est pas encore arrivé à la bonne solution. Vu le prix unitaire des moteurs j'espère qu'il passera un peu plus de temps à optimiser ce que je dis plus haut sinon ça sera à mon sens du gachit. Ca ne sert à rien de mettre le moteur le plus puissant du monde à une voiture si les pneus ne sont pas gonflés (c'est un peu l'effet que ça me fait de regarder ces vidéos).
Ces problématiques m’intéresse beaucoup, je suis en train de recréer toute une mécanique de quadruped sur Unity ou je peux tester mes hypothèses sans débourser un centime, optimiser ce qui doit l'être et une fois que je passerais à la réalisation physique, j'aurais, j'espère, levé un certain nombre d'incertitude
Posté par
- 02 mai 2020 - 10:02
On parle beaucoup de Boston Dynamics mais ces gars là ont aussi largement relevé le défis !
https://www.youtube....h?v=2H3dzZEi-qw
Posté par
- 01 avril 2020 - 12:08
Posté par
- 27 octobre 2019 - 03:30
Posté par
- 15 octobre 2019 - 08:29
Bonjour à tous,
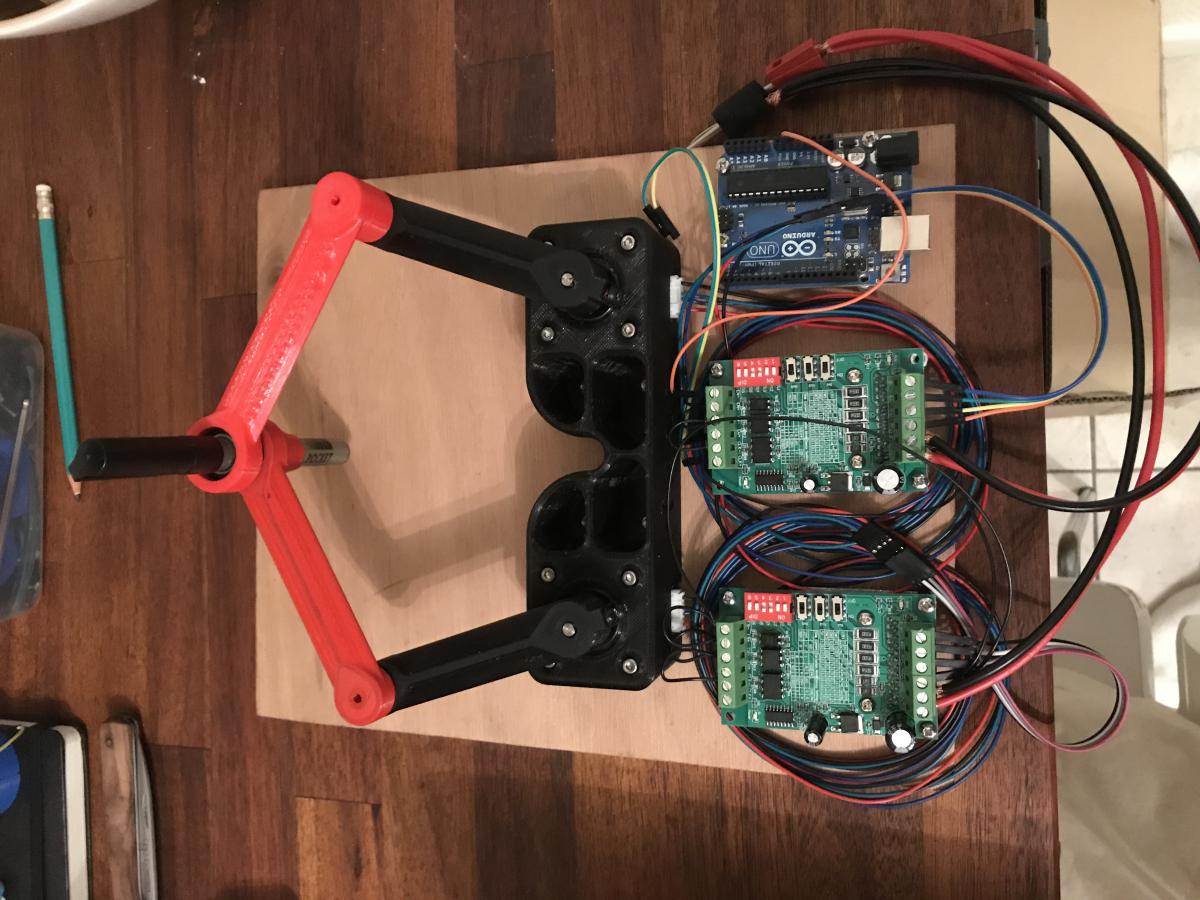
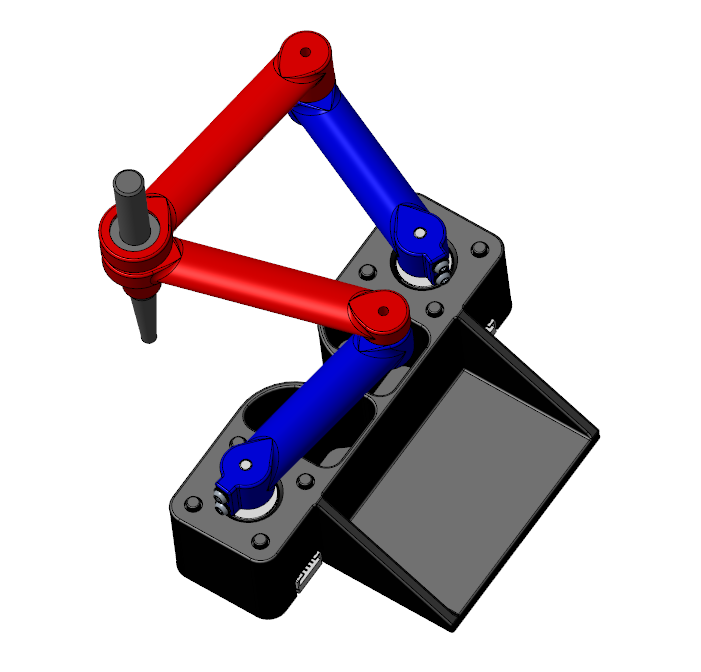
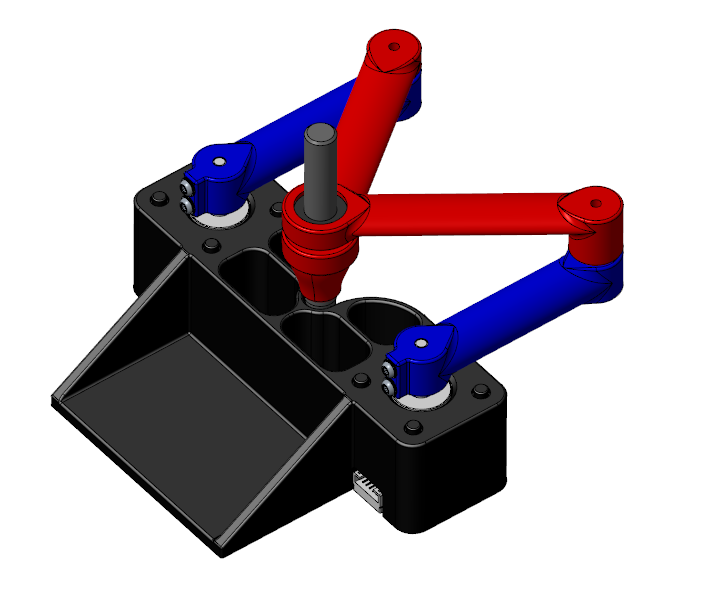
J'ai pas du tout avancé dernièrement faut vraiment que je me remotive c'est dur ! Pourtant j'ai vraiment envie de finir ce projet et d'enfin dessiner quelque chose avec ce bras
Le câblage électronique est complet, je vous laisse des petites photos, y'a plus qu'à coder ! miam

Posté par
- 23 août 2019 - 11:12
première mission : dessiner un carré !


Posté par
- 19 août 2019 - 09:49
Posté par
- 13 août 2019 - 02:52
Posté par
- 07 mai 2019 - 10:07
Bonjour,
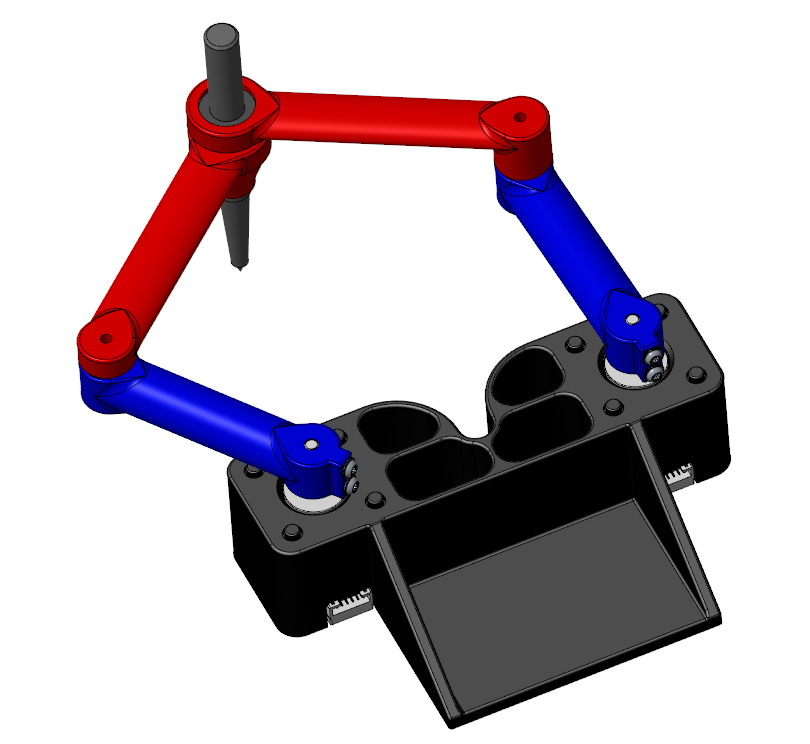
La nouvelle cinématique est au point, toutes les équations fonctionnent, mon code tourne comme sur des roulettes, je n'ai plus qu'à faire une belle petite méca et j'aurais un robot dessinateur fonctionnelle
(Il n'y a pas de changement flagrant entre chaque vidéos/photos que je poste, c'est beaucoup de fiabilisation du code, des maths et de la méthode pour le moment)
Je vais commencer à designer un traceur à mettre en bout de bras, je vais avoir besoin de ressorts
Posté par
- 27 avril 2019 - 01:19
Bonjour,
Aujourd'hui petit bricolage rapide afin de tester le couplage Processing/Arduino. L'idée ici est de faire communiquer mon arduino avec une interface graphique codée sur mesure.
J'ai rapidement codé un rectangle vert qui s'allonge ou rétracte en fonction de ce que mesure le capteur ultrason. Tout cela est réaliser grâce à la communication série.
Je veux pouvoir simuler sur mon ordinateur (vidéos que j'ai postées ici) ce que fera le robot sur papier, ça permet premièrement de travailler plus vite car on peut simuler beaucoup de chose sans avoir à passer sur le robot directement.
Deuxièmement, ça permet aussi d'avoir toute la partie "gros calcul" sur l'ordinateur et d'envoyer seulement les résultats à l'arduino et donc avoir un programme vachement plus simple.
Si vous avez des questions n'hésitez pas
Posté par
- 09 avril 2019 - 12:10


