Mon contenu
Mon contenu Homme
Homme






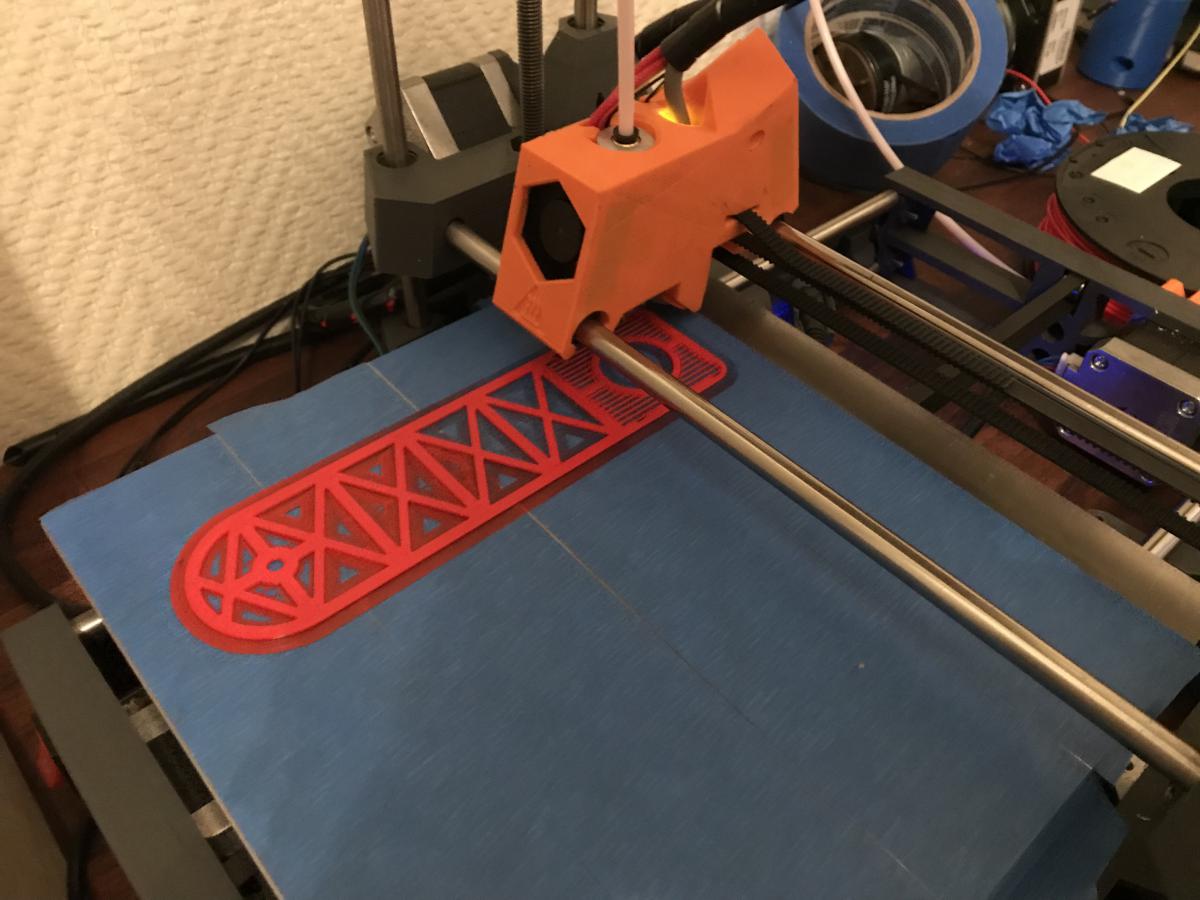
Résultat en image ce matin :

 Posté par
- 06 avril 2019 - 09:50
Posté par
- 06 avril 2019 - 09:50
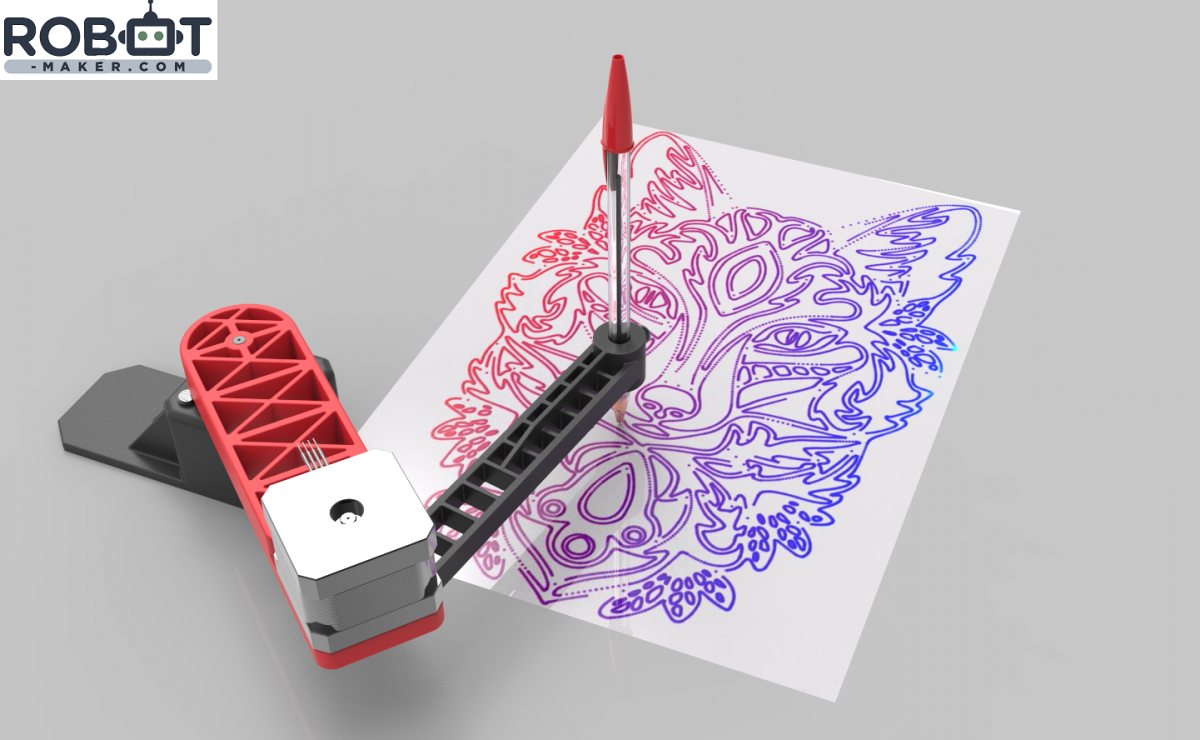
J'ai du coup commencé à travailler sur une première version proto du traceur avec des pièces à la va vite pour pouvoir tester mon post processeur et mettre en place l'architecture électronique/code du système.
L'impression des pièces devrait commencer demain, je vous laisse avec un rendu et une vidéo du mécanisme 
Posté par
- 06 avril 2019 - 12:07
Bonjour à tous,
Premièrement je souhaite remercié Mike118 de m'avoir proposer un partenariat afin de financer une partie du robot ! J'ai commandé mes pièces jeudi midi et je les ai reçu ce matin, ils sont rapide chez robot maker 
Tout était super bien emballé je vais pouvoir commencer la réalisation physique du bras aujourd'hui, je vais tenter un accouplement mécanique direct sans réduction voir ce que ça donne dans un premier temps.

Posté par
- 02 avril 2019 - 09:28
Re,
J'ai travaillé sur une nouvelle cinématique de bras ce soir, je réfléchis encore même si je pense que la première cinématique serait la plus simple à mettre en oeuvre.
J'aime beaucoup travailler la couleur et j'aimerai créer un traceur qui me permettrait de créer des dégrader comme sur mes vidéos, il va falloir que je trouve quelque chose de simple à mettre en oeuvre
Posté par
- 02 avril 2019 - 12:44
Bonjour à tous,
Dernièrement j'ai réfléchis à l'idée de réaliser un traceur avec un bras robot (idée de projet qui me trotte dans la tête depuis quelque temps).
J'ai donc commencé à écrire les équations de cinématique inverse d'un bras avec 2 DDL suivant Z afin de relier les coordonnées cartésiennes d'un ensemble de point (composant un dessin par exemple) en un angle alpha et beta qui correspond aux angles de mes moteurs.
J'ai ensuite codé un post processeur associé couplé à une petite interface graphique homemade afin de simuler tout ça en amont avant même de sortir un robot. (Je procède beaucoup comme ça, je code sous processing je vous le recommande c'est génial pour tester ses idées)
Je me suis essayé à un premier dessin je vous laisse juger du résultat :
Du coup, je n'ai plus qu'a fabriquer un robot avec deux moteurs pas à pas et le tour est, normalement joué
Je vais utiliser deux de ces moteurs : http://cnc25.free.fr/documentation/moteurs%20pap/pap_nmb.pdf
(23LM-K202-P4W)
Je vous tiens au jus
Posté par
- 24 mars 2019 - 12:01
On voit bien les 4 petits moteurs sur les quatre coins du châssis, ils doivent probablement enrouler un câble qui fait réagir le structure différemment en fonction de l'enroulement (je pense)
Posté par
- 23 mars 2019 - 11:27
Posté par
- 18 mars 2019 - 08:02
Posté par
- 12 mars 2019 - 07:47
Mec t'es pas clair là, tu n'aurais pas un énoncé ? un schéma ? une photo ? quel est le diamètre intérieur du tube ? Est ce qu'i faut simplement détecté si il y'a des trous ou savoir carrément combien y'en a, ou ils sont repartis et leur diamètre ?
Tu n'exposes (très mal d'ailleurs) qu'une partie de ton problème, on est tous plein de bonne volonté mais si tu ne nous aides pas on va avoir du mal à t'aider en retour...
Posté par
- 09 mars 2019 - 09:15
Pas besoin de camera, si tu mets le tube sous pression tu as juste à regarder l'évolution e la pression au cours du temps et si elle diminue c'est qu'il y'a des troues
Posté par
- 08 mars 2019 - 07:46
Si tu connais le volume du tube et la matériaux tu peux déterminer si il y'a un trou simplement en le pesant