

Objectif : Assembler un mini char puis le piloter grâce à une radiocommande.
Difficulté : 3/5
Temps d'exécution : 25-30 min
Matériel nécessaire :
- Un kit de robot à chenille
- Un driver de moteur à courant continu
- Une batterie LiPo dans son sac ignifuge
- une carte arduino uno
- Une radiocommande + récepteur
- 4 entretoises + 4 écrous
- 13 fils mâle femelle
Avant de commencer ce tutoriel, il est fortement conseillé d'avoir lu ou fait les tutoriels concernant la radiocommande 6 voies et le driver de moteur à courant continu. Certains éléments seront repris dans ce tutoriel mais pas tous =)
Qui n'a jamais rêvé pouvoir s'amuser avec un petit robot à chenille ?! Ce tutoriel va faire de ce projet une réalité. Nous allons voir ensemble comment fabriquer un petit char pilotable à distance ! Il sera même capable de franchir de petits obstacles comme des marches =).
Voici la base du robot en question : le kit est déjà assemblé ce qui facilite un peu la tâche ! Le châssis est soudé et les moteurs montés.
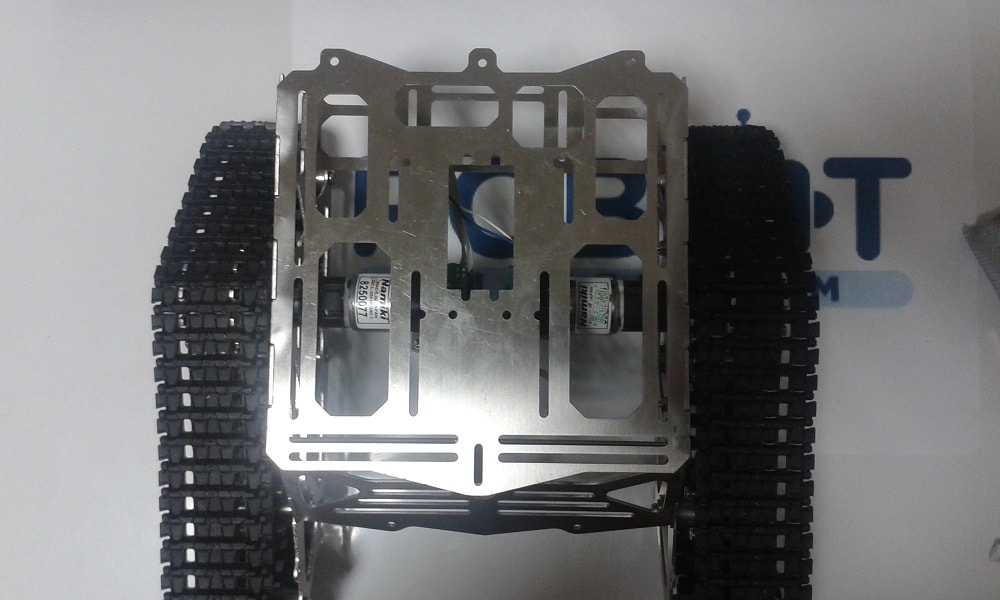
Dans un premier temps, le but est de faire fonctionner ce mini char sans les encodeurs présents sur les moteurs, histoire de prendre la main =).
Pour cela, en plus du kit robot j’utilise une radiocommande 6 voies, une carte clone Arduino Uno et un driver 20A pour deux moteur CC.
D’ailleurs, ce driver fonctionne très bien mais il est peut être un peu “surdimensionné” pour l’application que je vais en faire.
Première étape : assemblage des éléments sur le robot à chenille
Le soudage des fils des moteurs à courant continu :
La première constatation est que les fils de commande des moteurs sont trop courts, ce qui empêche de les relier au driver. Mais rien de bien grave ! Il suffit de les rallonger grâce à votre station de soudage préférée =).
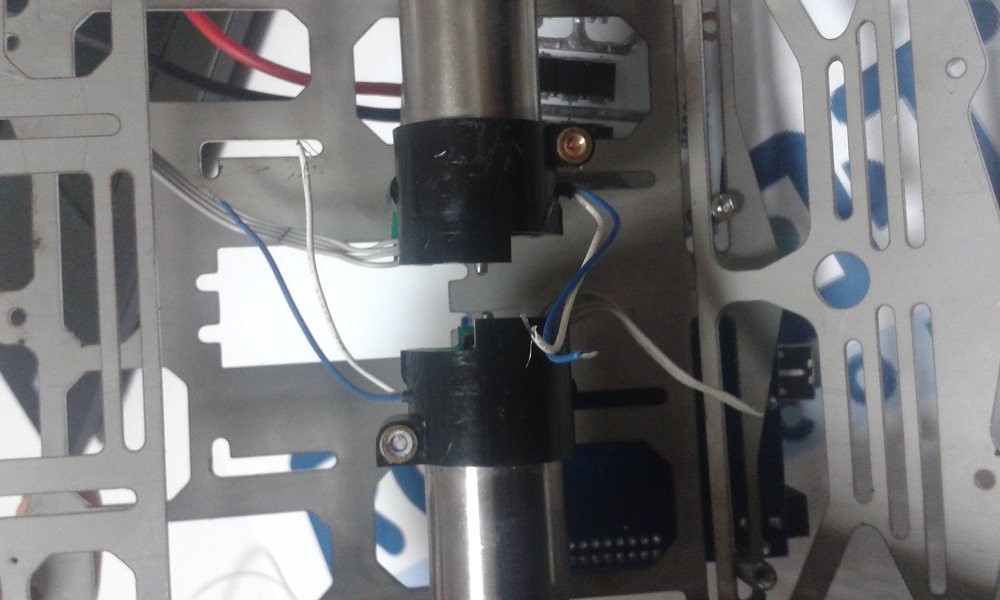
Je me sers de quelques fils de diamètre équivalent que j’ai récupéré, de gaine thermorétractable et d’une troisième main très pratique pour assembler les fils.
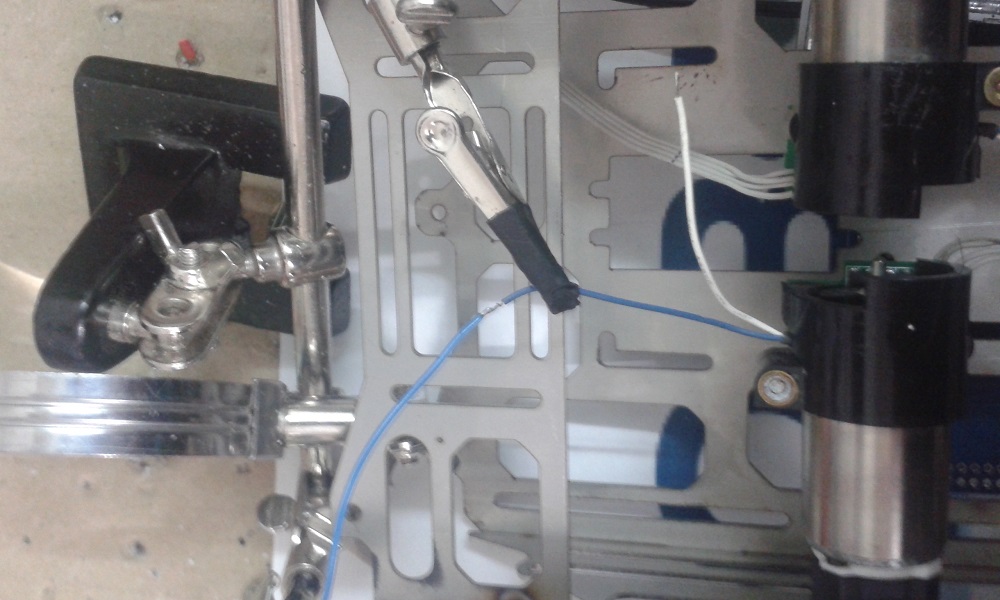
Quelques conseils ont été donnés pour assembler des fils dans ce tutoriel.
Après quelques points de soudure, les fils sont assemblés !
Le placement des cartes, les connections du driver et du récepteur radio à la carte arduino :
Ensuite vient une partie un peu plus laborieuse : le positionnement des cartes électroniques.
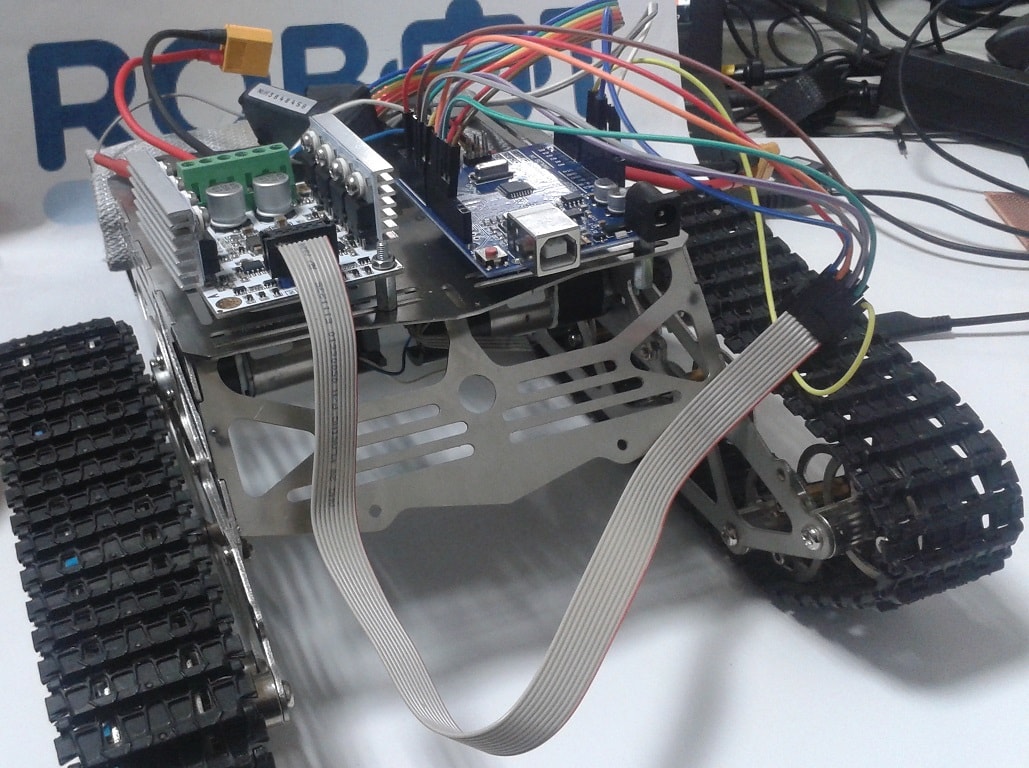
Plusieurs emplacement sont prévus sur le châssis alors il faut en trouver un qui convient, voici ma solution :
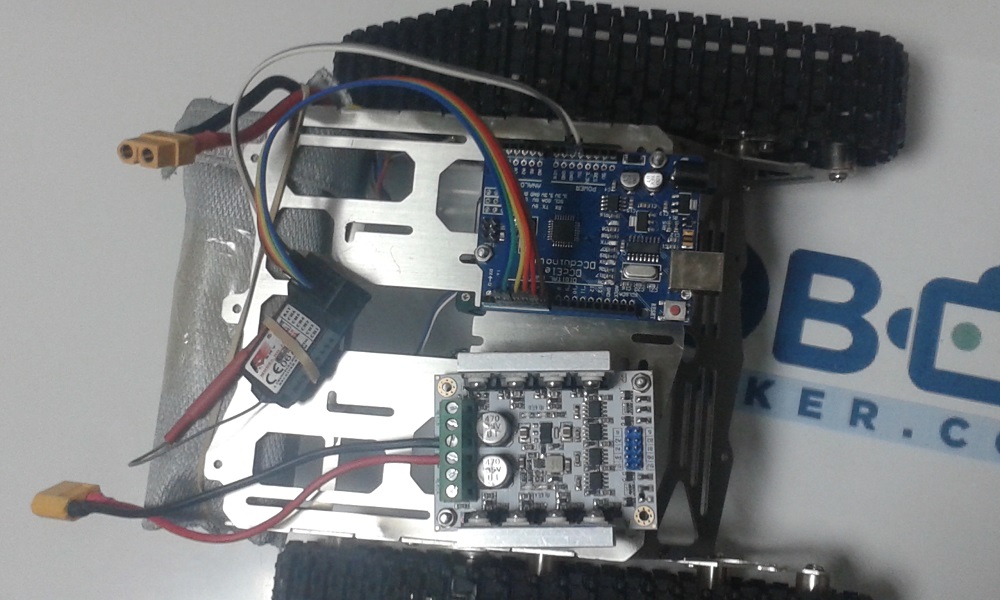
J’utilise des entretoises placées en diagonale pour fixer chaque carte. La batterie et le récepteur de la radiocommande sont maintenus au châssis par des élastiques.
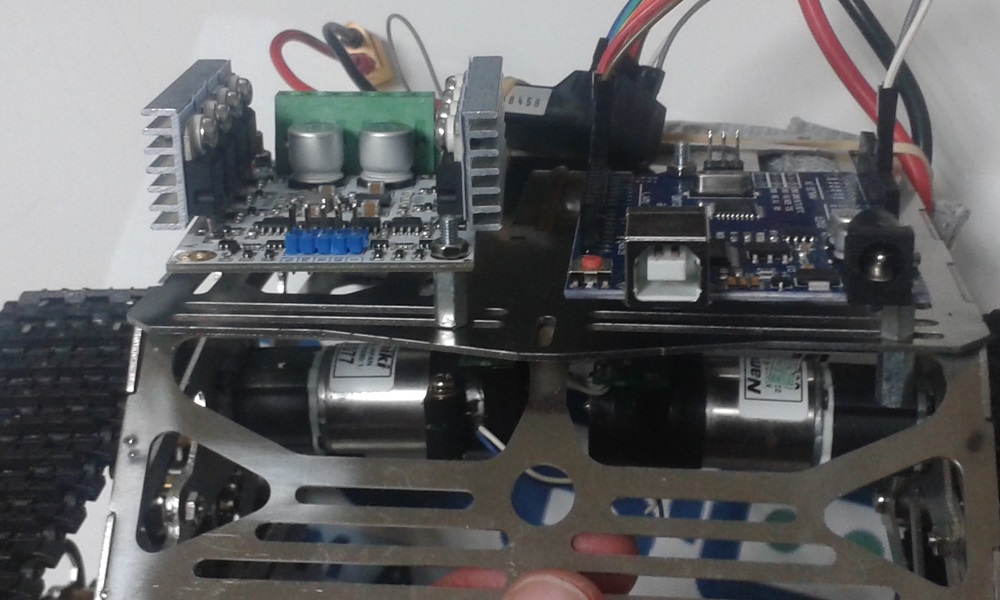
La partie qui pose problème c’est la fixation de ces cartes. En effet, comme le kit est déjà monté, la présence des moteurs est un peu gênante pour positionner correctement les éléments de fixation. Le mot d’ordre : patience !
Une fois que les cartes ont trouvées leurs emplacements, vous pouvez passer à la connectique !
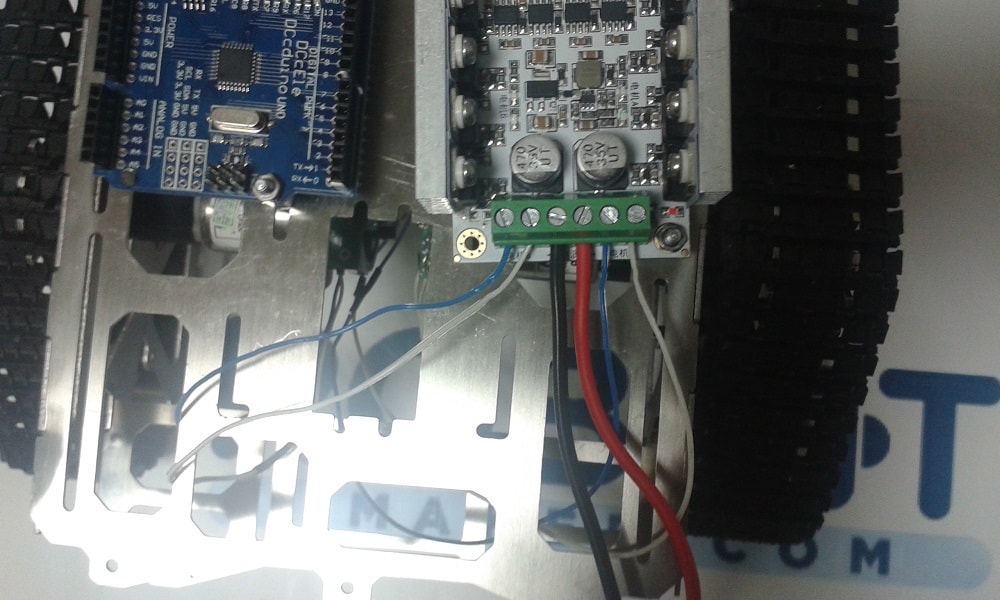
Commençons par le plus facile : les moteurs et la batterie. La batterie et les moteurs sont reliés aux borniers à vis du driver de moteur à courant continu. Sur ce driver, les deux emplacements centraux du bornier sont réservés à la batterie tandis que ceux aux extrémités servent pour les moteurs. Connectez le fil noir de la batterie au à l'emplacement "-" du bornier et le fil rouge au "+".
Ensuite, connectez les moteurs, le fil bleu sur la borne négative et le fil blanc sur la borne positive.
Pour les connections avec l'arduino, elles ont été vues dans les précédent tutoriels : sur la radiocommande et sur le driver.
Je mets un tableau récapitulatif en dessous.
| carte Arduino | récepteur radiocommande |
| GND | GND ligne "BAT" |
5V | VCC ligne "BAT" |
| digital pin 2 | signal CH1 |
| digital pin 4 | signal CH2 |
| digital pin 7 | signal CH3 |
| carte Arduino | driver de moteurs |
| GND | G |
| 5V | 5V |
| digital pin 3 | PB |
| digital pin 5 | B1 |
| digital pin 6 | B2 |
| digital pin 9 | PA |
| digital pin 10 | A1 |
| digital pin 11 | A2 |
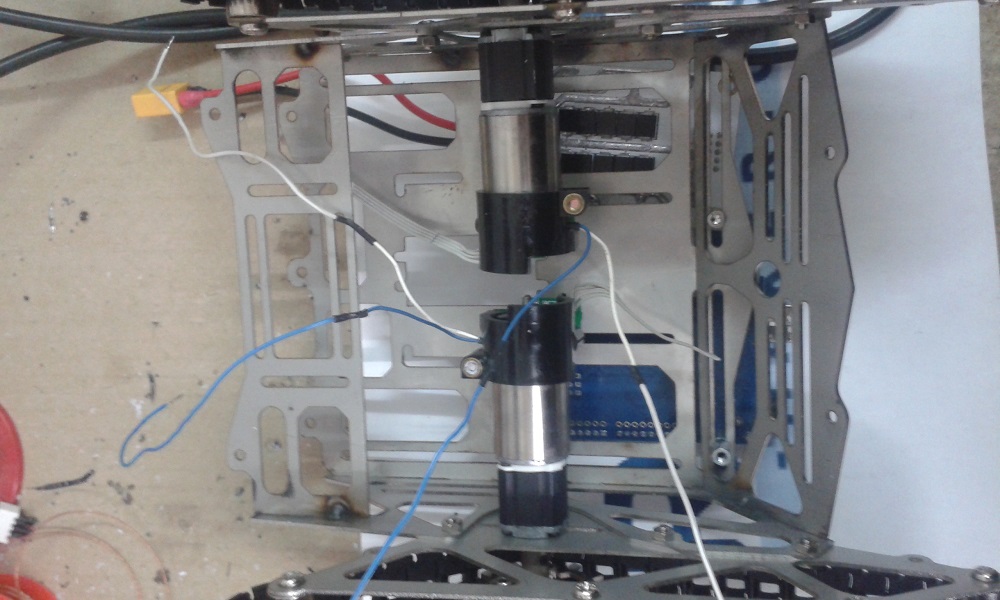
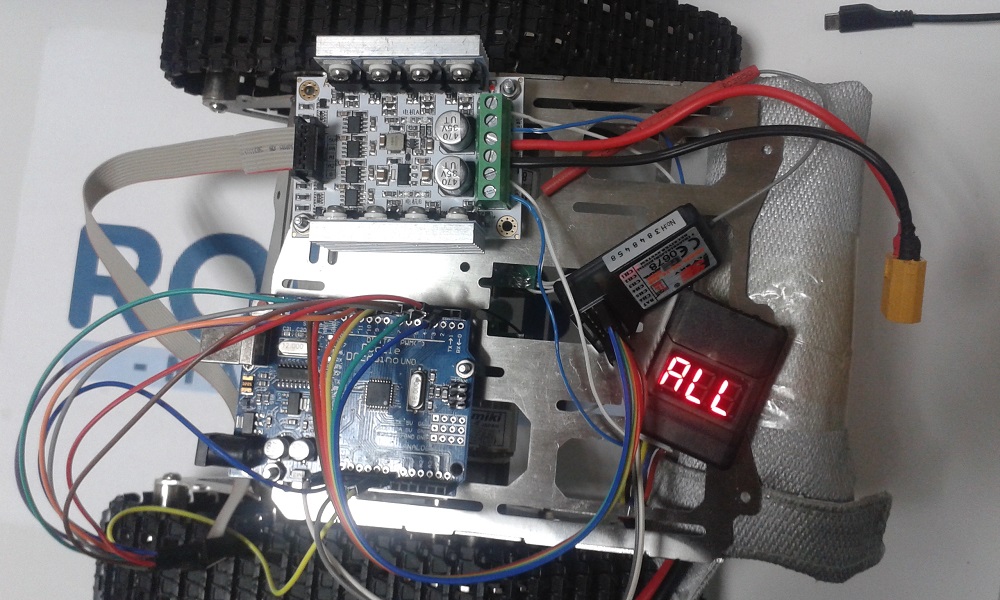
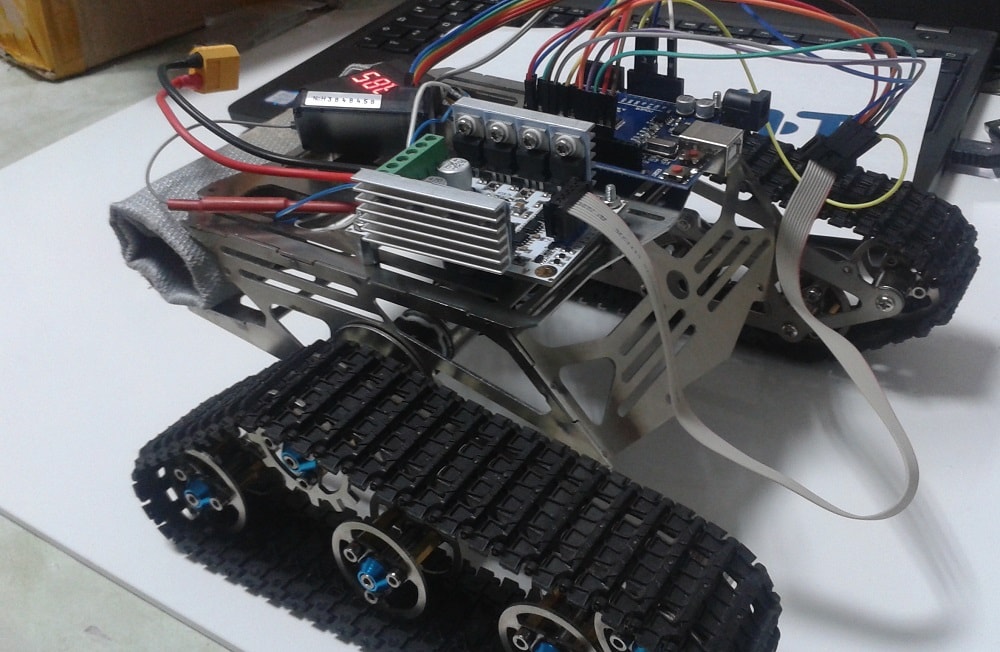
Une fois les branchements fait, ça devrais ressembler à ça : (il y a beaucoup de fils dans tous les sens...)
Deuxième étape : programmation du robot à chenille
Le déplacement avant/arrière :
Et voilà ! Il ne reste plus que la programmation de la carte arduino à faire pour faire fonctionner votre mini char !
Pour commencer, voici un code qui permet uniquement de faire avancer ou reculer votre robot en prenant en compte seulement deux voies de la radiocommande. L'axe vertical du joystick droit pour la direction et l'axe vertical du joystick gauche pour la vitesse.
La vitesse est calculée en fonction de la position du joystick gauche (voie 3 dans mon cas). C'est la fonction "map" qui permet de la calculer. Cette fonction convertie la valeur de l'impulsion, qui correspond à la position, reçue par le récepteur (entre 1000 et 2000) en une valeur comprise entre 0 et 255 qui va être transmise aux moteurs.
Le déplacement en virage :
Une fois qu'on maîtrise bien les mouvements avant/arrière, il est temps de s'attaquer aux virages !
Le programme qui suit prend en compte 3 voies de la radiocommande : les deux axes du joystick droit et l'axe vertical du gauche.
Les virages sont fait en "courbes", le robot continu d'avancer ou de reculer lorsqu'il tourne.
Pour tourner de cette manière, le programme fait tourner plus vite le moteur opposé à la direction souhaitée. Si le robot doit aller à droite, c'est le moteur de gauche qui tourne plus vite que celui de droite =)
Et pour terminer ce tutoriel, voici une démonstration du pilotage du robot en vidéo !
Votre robot est près à fonctionner, il ne vous reste plus qu'à lui tracer un parcours pour vous amuser avec !
Vous pouvez essayer de modifier le programme pour améliorer la commande et la rendre plus fluide. N'hésitez pas à partager vos résultats sur le forum !
Cet article vous a plu ? Laissez-nous un commentaire ! Annuler la réponse
Tous les champs sont obligatoires