Avec le kit Ultimate 2.0 de makeblock, il y a la possibilité de monter un petit robot auto-equilibré très sympatique.
En partant de cette base et avec juste le contenu du kit, j'ai tenté de monter un robot auto-équilibré un peu plus grand, avec un mécanisme pour se remettre droit après un échec d'équilibrage.
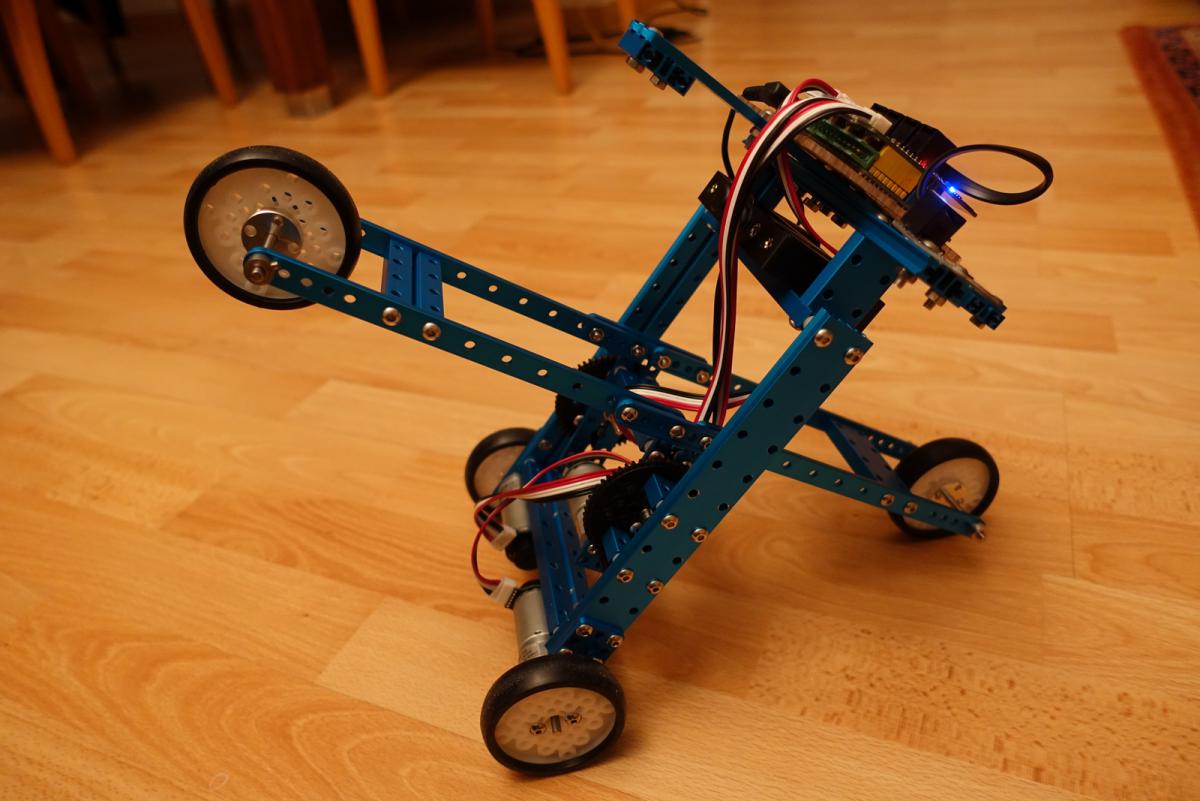
Ca donne cela :
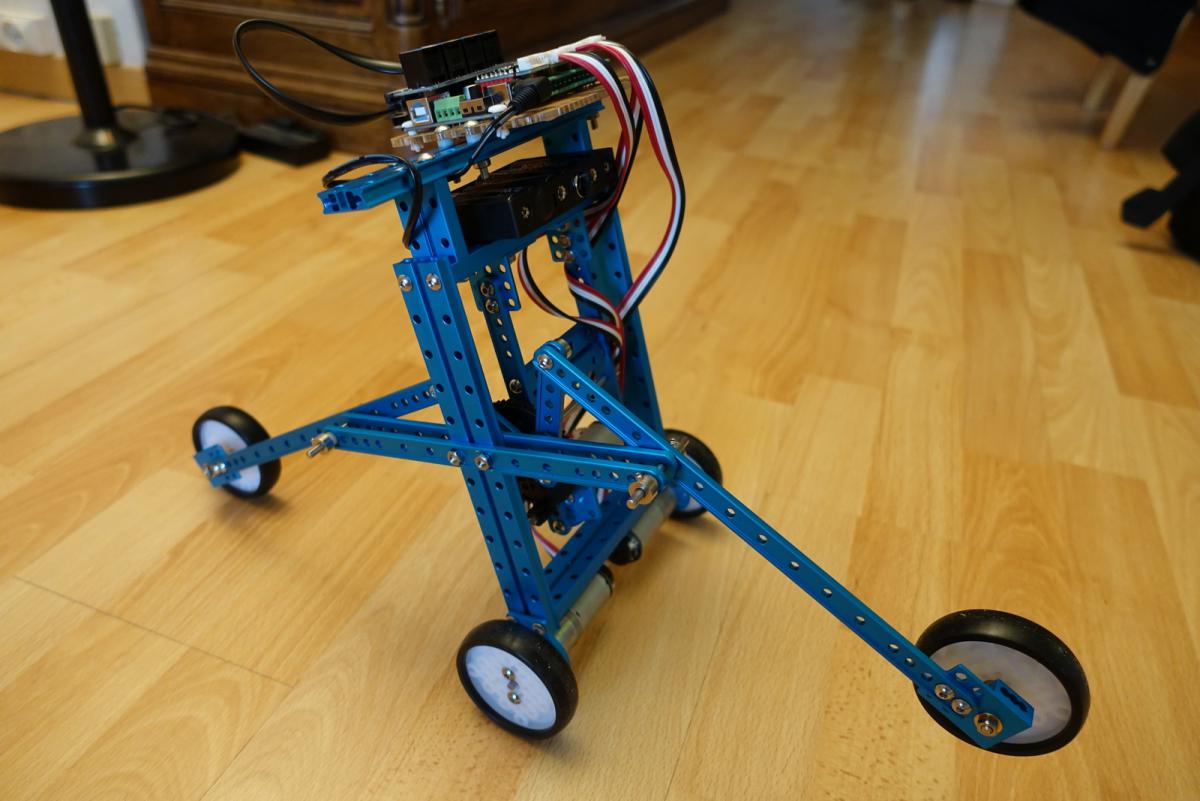
Le mécanisme pour remonter le robot fonctionne bien, mais il déplace le centre de gravité vers l'une des roues, ce qui oblige a un contrôle asymétrique des roues pour tenter de se déplacer tout droit.
Avec en plus l'ajout de poids, la taille du robot ne permet plus de s'auto-équilibrer avec les moteurs fournis et les roues utilisée. Il faut trop vite envoyé la puissance maximum au roues et même cela ne suffit pas.
Un peu de tweeking tu PID permet de le maintenir quelques secondes, mais le moindre déviation de plus de 1 degré n'est pas rattrapée par les moteurs même en puissance max.
Je vais donc changer d'approche, en remplacant les deux bras par un seul mécanisme de balancier, je vais aussi remonter le centre de gravité, de ce que j'ai lu ça facilite l'auto-équilibrage, et je vais essayer de le garder plus proche du mileu des deux roues.
Suite au prochain numéro.





 On va essayer de les référencer sur la boutique donc si vous avez un kit ou des pièces en particulier que vous souhaitez voir n'hésitez pas à nous en faire part sur le
On va essayer de les référencer sur la boutique donc si vous avez un kit ou des pièces en particulier que vous souhaitez voir n'hésitez pas à nous en faire part sur le