Bonjour à tous,
Novice en la matière, je suis en train de mettre au point un robot "éviteur" d'obstacles. J'utilise pour ce faire
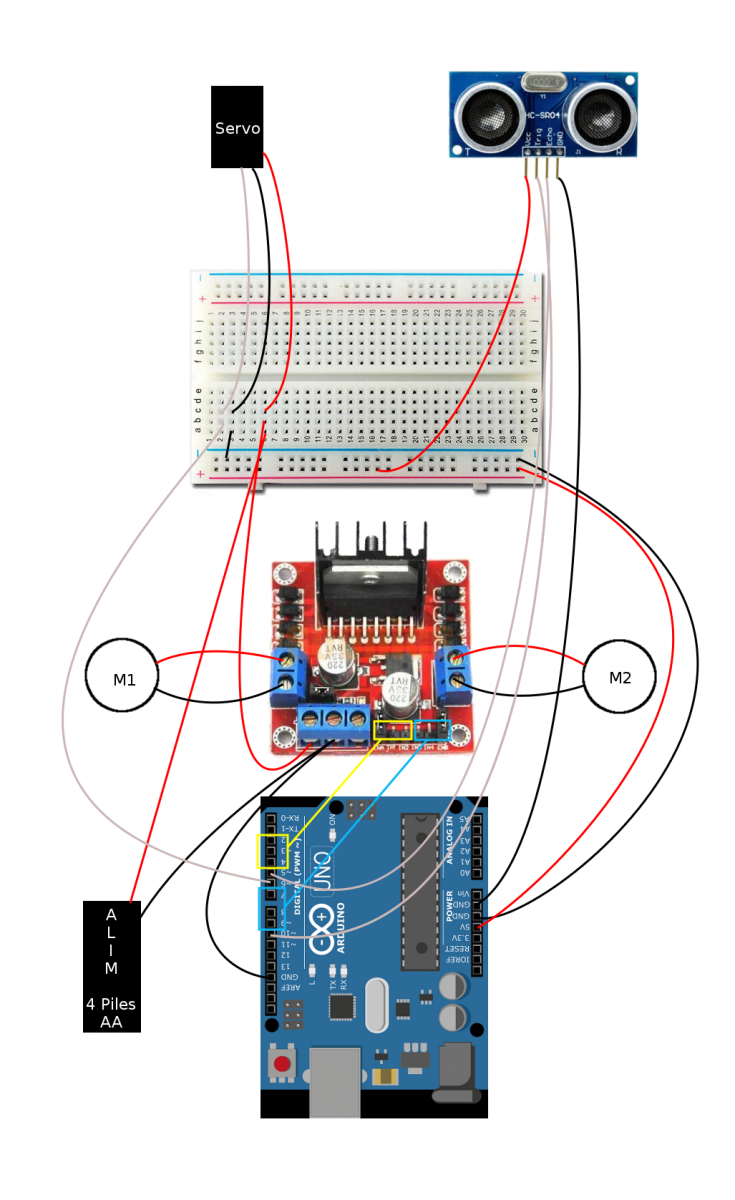
- 2 moteur DC (+ L298 stepper motor)
- M1 pin 2, 3, 4
- M2 pin 7, 8, 9
- 1 servo moteur pin 10
- 1 capteur ultrason
Mon problème est le suivant, lorsque rien n'est déclaré dans le programme au niveau du servo, tout fonctionne correctement, les moteurs tournent en même temps.
Mais lorsque je configure le servo et que je l'"attache" au pin adéquat, un des deux moteurs ne tourne plus lorsque le servo fonctionne...?
Comment cela se fait-il?
Merci d'avance pour vos lumières 
H