
J'ai pensé qu'il serait intéressant d'avoir un fil où on pourrait discuter de la tecnique des servos.
J'ouvre le feu avec ces 2 vidéos qui mettent en jeu un mécanisme de test du couple, identique.
Ce système à l'air très simple, qu'en pensez-vous ?

85 réponses à ce sujet
#1

Oracid
-
- Modérateur
-

- 7â¯030 messages
Pilier du forum
- Gender:Male
#2
cocothebo
-

- Membres
-
- 341 messages
Habitué
- Gender:Male
Posté 01 février 2018 - 09:15
Salut,
Moi ça me semble effectivement simple, après sur la première vidéo, ça manque de précision, tout "bouge" aussi bien l'attache du peson que le lien servo-peson etc.
Bref dur d'aoir une vraie mesure dans ces conditions.
Pour la deuxième vidéo ça me semble plus calé, avec une distance précise entre l'axe de rotation est l'effort, le peson qui ne bouge presque pas (sinon ben ça doit surement engendrer une erreur de mesure) et le couple mesuré avec le bras à environ 90° (par rapport au plan horizontal) ce qui est très important sinon la longueur réelle du bras de levier est plus courte.
Après dans tous les cas la on mesure le couple de blocage/maintien, ce qui veut dire que c'est le couple à vitesse nulle, si on veut faire bouger qqc, le couple sera forcément plus faible (de plus en plus faible avec l'accroissement de la vitesse).
D'ailleurs c'est linéaire en théorie vu que la puissance du moteur = couple * vitesse angulaire. Même si à vitesse nulle ça voudrait dre qu'on a un couple infini  Mais bon on voit bien sauf aux limites que donc plus on va vite moins ya de couple.
Mais bon on voit bien sauf aux limites que donc plus on va vite moins ya de couple.
- Forthman aime ceci
#3
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 01 février 2018 - 12:28
Si je comprends bien, quand le palonnier est à 90°, la tige métallique et l'axe d'attache du peson doivent être alignés et sur le même plan.le couple mesuré avec le bras à environ 90° (par rapport au plan horizontal) ce qui est très important sinon la longueur réelle du bras de levier est plus courte.
J'ai regarder quelques vidéos, les mesures sont assez vagues, mais le but en gros, c'est de vérifier les caractéristiques du fabricant.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#4
Mike118
-

- Administrateur
-
- 10â¯300 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 01 février 2018 - 04:22
Oui pour ce genre de teste avec " palonnier " il faut que la mesure soit faite lorsque le palonnier est à 90° sinon il faut ajouter un calcul ( avec un sinus ou un cosinus en fonction de l'angle que vous prenez ) pour avoir la bonne valeur.
Afin de ne pas avoir cette problèmatique de 90° qui peut provoquer un réglage délicat le top est d'utiliser non pas le palonnier qui n'est pas rond, mais une poulie.
Et là plus de problème de position.
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#5
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 01 février 2018 - 07:10
Ah, là, je ne comprends pas pourquoi la poulie supprimerais le problème.Afin de ne pas avoir cette problèmatique de 90° qui peut provoquer un réglage délicat le top est d'utiliser non pas le palonnier qui n'est pas rond, mais une poulie.
Et là plus de problème de position.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#6
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 01 février 2018 - 07:13
Voici une vidéo, en français, où on vous explique comment utiliser un testeur de servos.
Le lien de la vidéo est mort, je vous en mets un autre. Cela vous en coutera 1,46€ : https://www.banggood...ur_warehouse=CN
Le lien de la vidéo est mort, je vous en mets un autre. Cela vous en coutera 1,46€ : https://www.banggood...ur_warehouse=CN
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#7
Forthman
-

- Membres
-
- 1â¯486 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 01 février 2018 - 11:30
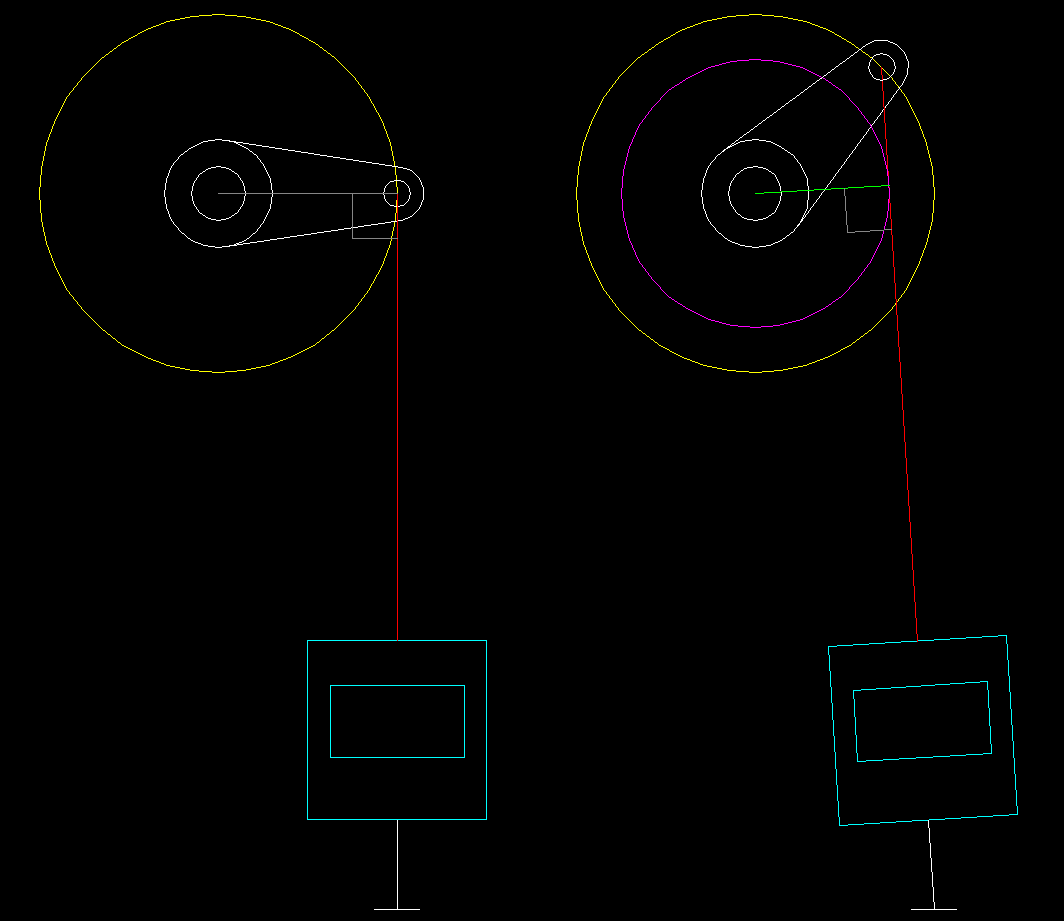
petit dessin pour expliquer.
Imaginons un servo avec un couple au blocage de 30Kg/cm et un levier de 20mm de long (cercle jaune)
sur l'image de gauche, l'effort est bien perpendiculaire, du coup sur le peson la valeur lue sera proche de 15Kg
sir l'image de droite, le levier a tourné de 45°, donc la longueur à prendre en compte
pour la longueur du levier devient : cos(45)*20 =14.1 (cercle violet)
La valeur lue sur le peson sera alors proche de 21.2Kg (en fait un peu moins car l'axe du peson s'est incliné un peu aussi)
Dans le cas d'une poulie qui enroule un cable, l'effort reste perpendiculaire : le rayon ne passe pas du jaune au violet.
Donc pas de calcul d'angle à faire
Image(s) jointe(s)
#8
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 02 février 2018 - 07:28
Oui, un cable ! Mais là, comme là je partais sur une tringle rigide, c'est pour cela que je ne comprenais pas.Dans le cas d'une poulie qui enroule un cable...
Mais de toute façon, je ne ferai aucun calcul, puisque ma mesure sera faite à 90°.
Sinon, un élastique bien costaud, ne ferait il pas l'affaire ? Y a t-il une contre-indication ?
Les pesons, avant, ils étaient bien fait avec des ressorts !
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#9
Mike118
-
- Administrateur
-
- 10â¯300 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 02 février 2018 - 07:46
Sinon, un élastique bien costaud, ne ferait il pas l'affaire ? Y a t-il une contre-indication ?
Les pesons, avant, ils étaient bien fait avec des ressorts !
Aucun problème =)
- Oracid aime ceci
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#10
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 02 février 2018 - 08:27
Ah, ça, c'est une bonne nouvelle !Aucun problème =)
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#11
Forthman
-
- Membres
-
- 1â¯486 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 02 février 2018 - 08:28
Un peson numérique se déforme aussi, mais tellement peu qu'à l'oeil ça ne se voit pas ;-)
un élastique qui s'enroule sur une poulie ? Pourquoi pas, ça permettra d'avoir un effort plus progressif, et si tu contrôle en même temps la vitesse,
ça permettra de faire des jolies courbes couple/vitesse :-)
#12
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 02 février 2018 - 02:53
Je ne voyais pas ça comme ça. Pour l'instant, je vais essayer de faire simple en partant du palonnier livré avec le servo.un élastique qui s'enroule sur une poulie ?
Pour l'élastique il y a plusieurs options :
- un gros élastique pour sardine de tente.
- un ressort à spires jointives.
- un mini tendeur.
- plusieurs élastiques toriques pour cheveux.
Problème. Supposons que le palonnier démarre à l'horizontal pour finir sa course à la verticale.
Comment dois-je aligner le peson ? Sur l'axe du servo ou à la hauteur de la fin de course du palonnier ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#13
Mike118
-
- Administrateur
-
- 10â¯300 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 02 février 2018 - 03:01
Le mieux est de placer le peson de sorte à ce que lorsque le " palonnier finit sa course " le fil soir aligné dans l'axe du peson, et que le bras du palonnier forme un angle de 90° avec le fil.
L'usage d'une poulie facilite l'obtention de ce cas.
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#14
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 02 février 2018 - 03:19
C'est ce que je pensais également.Le mieux est de placer le peson de sorte à ce que lorsque le " palonnier finit sa course " le fil soir aligné dans l'axe du peson, et que le bras du palonnier forme un angle de 90° avec le fil.
L'usage d'une poulie facilite l'obtention de ce cas.
Pour la poulie, j'y pense très fort...
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#15
cocothebo
-
- Membres
-
- 341 messages
Habitué
- Gender:Male
Posté 02 février 2018 - 03:26
Pour un test de servo tu peux faire simple, les palonniers rond existent, il suffit de lui rajouter une gorge et d'attacher un morceau de fil non extensible.
Ce même fil qui est rattaché à ton peson/elastique/ressort. après ya plus qu'à aligner horizontalement le haut du palonnier avec le point d'encrage du peson, et tout restera a 90°.

#17
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 02 février 2018 - 07:36
Je propose de continuer cette discussion, ici http://www.robot-maker.com/forum/topic/11846-un-banc-de-test-de-couple-moteurservo/?p=92110pour ne pas trop polluer ce fil qui au départ était destiné aux servos, en général et non pas sur ma réalisation personnelle.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#18
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 25 mars 2018 - 06:50
Le problème avec les servos, c'est qu'ils ne sont pas fait pour supporter un couple transversal à leur axe.
Il existe plusieurs solutions, en voici une :
https://www.servocit...vos/servoblocks
Il existe plusieurs solutions, en voici une :
https://www.servocit...vos/servoblocks
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#19
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 10 juillet 2018 - 10:43
Voici une vidéo dans laquelle James Bruton montre comment faire un servomoteur très puissant avec un moteur d'essuie glaces et un Arduino Uno.
Je ne suis pas sûr d'avoir tout compris, mais il me semble qu'il indique comment éviter les oscillations grâce aux interruptions. De plus, l'utilisation d'une bibliotèque PID devrait permettre un positionnement optimal.
Peut importe si la fabrication d'un tel servo est rentable (voir,http://www.robot-maker.com/forum/topic/11322-test-du-gros-servo-asme-mxa-260kgcm-012s60-3600/),c'est l'acquisition des connaissances et du savoir faire qui me paraissent ici le plus important.
Tout le code et le projet est disponible ici, https://github.com/X...WiperMotorServo
Je ne suis pas sûr d'avoir tout compris, mais il me semble qu'il indique comment éviter les oscillations grâce aux interruptions. De plus, l'utilisation d'une bibliotèque PID devrait permettre un positionnement optimal.
Peut importe si la fabrication d'un tel servo est rentable (voir,http://www.robot-maker.com/forum/topic/11322-test-du-gros-servo-asme-mxa-260kgcm-012s60-3600/),c'est l'acquisition des connaissances et du savoir faire qui me paraissent ici le plus important.
Tout le code et le projet est disponible ici, https://github.com/X...WiperMotorServo
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#20
Amhnemus
-

- Membres
-
- 593 messages
Membre passionné
- Gender:Male
- Location:Montigny-le-bretonneux
Posté 10 juillet 2018 - 11:38
Tu peux le faire aussi avec un moteur de lève vitre de voiture ça un très fort couple puisqu'il faut soulever une vitre de voiture qui pèse très lourd le problème c'est le prix neuf environ 150 euros mais dans une casse ça peux le faire
1ère place Robot Warrior 2019 humanoïdes autonome
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




