ha ?.. pffff.. j'ai déja acheté le perchlo et le révélateur...
en tous cas merci pour le conseil, la prochaine fois je teste le persulfate de sodium.
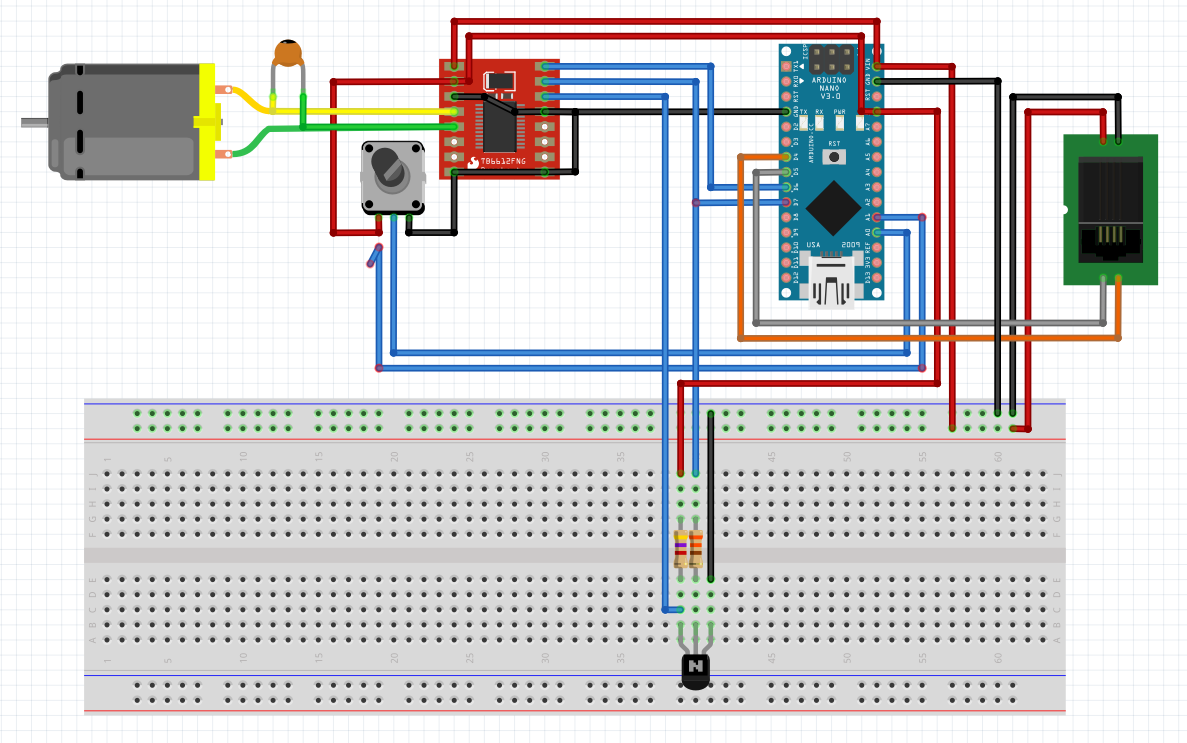
j'ai fais un petit schema (je ne suis pas doué sur frittzing).. malheureusement je n'ai pas été foutu de trouver un codeur du coup j'ai mis un autre codeur et un fil reste dans le vide..
pour le condo au cul du moteur je crois que je mettais du 22µF.. vous pouvez me le confirmer ?
pour les résistances je crois que 330 Ohms sur la base du NPN ( lequel choisir ? ) et 4,7KOhms pour le pull-down sont des valeurs standard (je vérifierai demain).
et voici mon premier jet de schéma :
(je ne maîtrise pas du tout fritzzing, merci pour votre indulgence ^^)
En faisant des recherches je suis tombé sur plusieurs forums ou était mentionné un problème avec l'I²C sur les clones de nano.. ça me fait un peu flipper pour la suite.


Présentation du projet Servomoteur à rotation continue adressable en I²C
#41

-
- Membres
-

- 825 messages
Membre passionné
Posté 25 juillet 2018 - 03:33
#42
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 25 juillet 2018 - 06:41
Voilà une bonne idée !pour ceux qui veulent un gros moteur qui dépote il suffit de jeter le moteur que j'ai choisi et d'en mettre un autre à la place
Comme l'a suggéré Forthman, un schéma le plus ouvert possible permettra à chacun de l'adapter à ses besoins.
En lisant tes derniers postes, je me rends compte que tu es en train de refaire le servo Lego.
Ma chaine YouTube : https://www.youtube..../oracid1/videos

#44
-
- Membres
-
- 825 messages
Membre passionné
Posté 25 juillet 2018 - 08:38
ton condensateur c'est pour quoi ? si c'est de l'antiparasite, sa valeur devrait être en nF et pas en µF (lors de l'inversion de sens le driver ne va pas aimer)
oui, c'est l'antiparasite. merci.. je vais donc mettre 22nF pour le moment...
En lisant tes derniers postes, je me rends compte que tu es en train de refaire le servo Lego.
Je ne sais pas si je refais le servo lego, mais en effet, mon objectif est le même que chez lego (proposer un produit pédagogique adapté à la structure des robots par la simplification du cablage).
#45
-
- Membres
-
- 825 messages
Membre passionné
Posté 27 juillet 2018 - 01:40
pour ma commande, j'ai bien envie de me tourner vers ceci :
http://www.robot-maker.com/shop/moteurs-et-actionneurs/79-kit-moteur-gm25-370ca-encodeur-roue-chromee.html
mais je ne trouve pas comment indiquer que je souhaite le rapport de réduction de 130.
je n'ai pas trouvé d'infos sur le nombre de pulses par tour des phases de l'encodeur.
#46
-
- Membres
-
- 825 messages
Membre passionné
Posté 01 août 2018 - 07:49
 j'ai bien reçu les composants.. je vais pouvoir me lancer
j'ai bien reçu les composants.. je vais pouvoir me lancer  (dès que j'aurais réparé mon OTTO a qui j'ai arraché le fil d'alim
(dès que j'aurais réparé mon OTTO a qui j'ai arraché le fil d'alim  ^^ ).
^^ ).
edit :
ce soir j'avais envie de jouer à fusion360, du coup j'ai commencé la modélisation de la coque :
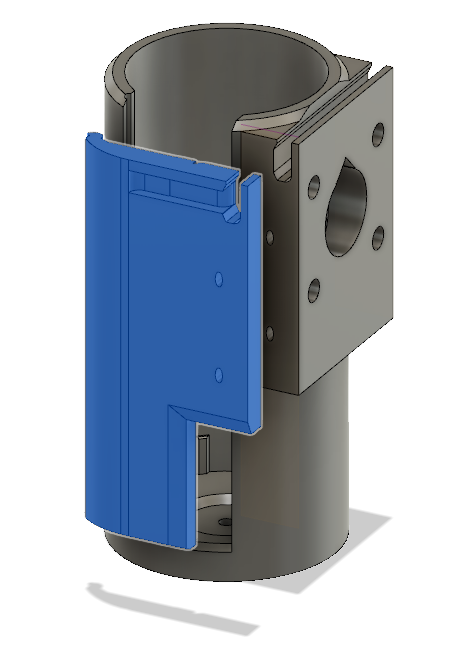
.. bon c'est un premier jet.. il y a encore du boulot.
edit :
et voilà un boitier fonctionnel (si j'arrive à faire passer le cablage).



pensez-vous que je devrais faire des trous dans la coque pour éviter la surchauffe du moteur ?
#47
-
- Membres
-
- 825 messages
Membre passionné
Posté 03 août 2018 - 11:51
me revoila.. j'ai acheté les derniers éléments (les "breadboard jumper wires" et une RJ12 femelle)
je voulais du RJ11, il n'y avait que du RJ12.. mais comme dit le dicton : "faute de HDMI on s'branche en SVGA".
j'ai une question sur le driver : il n'y a pas de borne pour le PWM, ça veux dire que j'envoie le PWM dans les bornes "A-1A" ou "A-1B" selon le sens de rotation souhaitée?.. (je pense que oui, mais je préfère demander avant de faire n'importe quoi)
et il y a encore la question de mon boitier imprimé en 3D.. vous pensez que je devrais l'ajourer pour que le moteur puisse se refroidir un minimum ou ça passe ?
#48
-

- Administrateur
-
- 10â¯300 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 03 août 2018 - 12:03
Alors, tu mets un Pwm sur A par exemple et tu met un signal sur B.
Si tu mets un PWM de 100% sur A et un 0 sur B ça tourne à fond dans un sens.
Si tu mets un PWM de 0% sur A et un 1 sur B ça tourne à fond dans l'autre sens.
Si tu mets 1 et 1 sur A et B ou 0 et 0 ça tourne pas.
Le tout ou rien gère le sens.
Le pwm gère la vitesse mais doit être adapté en fonction du sens .
- thermo_nono aime ceci
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#49
-
- Membres
-
- 825 messages
Membre passionné
Posté 03 août 2018 - 12:50
merci beaucoup.
du coup on oublie le "NOT logique" que je voulais rajouter pour le sens de rotation et j'utilise une sortie PWM supplémentaire sur le nano.. (et ça m'arrange car il aurait fallu que je ressorte l'insoleuse, les produits chimiques, etc... ^^ )
#50
-
- Administrateur
-
- 10â¯300 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 03 août 2018 - 01:01
Bah en fait en théorie tu as pas besoin de mettre 2 PWM ... Tu as juste besoin d'un PWM et d'un pin digital...
Après qui peut le plus peut le moins ...
- thermo_nono aime ceci
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#51
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 03 août 2018 - 01:05
- thermo_nono aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#52
-
- Membres
-
- 825 messages
Membre passionné
Posté 03 août 2018 - 01:20
Perso, j'aurai mis tous les circuits du même coté.
oui, c'est ce que je voulais faire, mais ça dépassait (et il me reste encore un RJ12 femelle à placer).
C'est vrai que ça m'aurait bien aidé pour toute la connectique (là il faut faire le tour du moteur et je ne sais pas si tous les fils vont passer dans les goulottes que j'ai prévues)
edit :
quoi que tout du même côté sur deux étages ça pourrait être envisageable.. je vais y réfléchir.
#53
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 03 août 2018 - 06:26
Pourquoi ne pas faire un parallélépipède, comme un servo ?
- Forthman aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#56
-
- Administrateur
-
- 10â¯300 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 03 août 2018 - 07:55
Sinon on peut imaginer un L ... avec le driver au cul du moteur ...
Sinon pour en revenir à ce que je disais pour le contrôle du driver avec un seul PWM :
void setVitesseMoteur(int16_t vitesseMoteur) {
vitesseMoteur = constrain( vitesseMoteur, -255, 255);
if (vitesseMoteur >= 0) {
avancerMoteur(vitesseMoteur);
}
else {
reculerMoteur(-vitesseMoteur);
}
}
void avancerMoteur(uint8_t a) // En avant
{
analogWrite (PINMOTEURA, 255 - a); // Contrôle de vitesse en PWM, moteur 1
digitalWrite(PINMOTEURB, HIGH); // sens de marche avec HIGH
}
void reculerMoteur (uint8_t a) // En arrière
{
analogWrite (PINMOTEURA, a);
digitalWrite(PINMOTEURB, LOW);
}
évidement cela peut se faire en une seule fonction mais faire ce genre de découpage permet de facilement mettre en place des "wrapper" pour s'adapter à différentes configurations hardware.
- thermo_nono et Forthman aiment ceci
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#57
-
- Membres
-
- 825 messages
Membre passionné
Posté 03 août 2018 - 10:51
merci, joli bout de code.. j'espère faire aussi propre et concis pour le reste du programme.
et je préfère aussi plein de petites fonctions, ça permet des modifs futures et une meilleure lisibilité si quelqu'un d'autre reprends le prog.
Juste une question : à la deuxième ligne tu voulais mettre :
vitesseMoteur = constrain( vitesseMoteur , -255, 255);
et non pas
vitesseMoteur = constrain( vitesseMoteurDroit , -255, 255);
c'est bien ça ?..
#58
-
- Administrateur
-
- 10â¯300 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 04 août 2018 - 01:38
merci, joli bout de code.. j'espère faire aussi propre et concis pour le reste du programme.
et je préfère aussi plein de petites fonctions, ça permet des modifs futures et une meilleure lisibilité si quelqu'un d'autre reprends le prog.
Juste une question : à la deuxième ligne tu voulais mettre :
vitesseMoteur = constrain( vitesseMoteur , -255, 255);
et non pas
vitesseMoteur = constrain( vitesseMoteurDroit , -255, 255);
c'est bien ça ?..
Je ne vois pas du tout de quoi tu parles  ( Oui j'ai édité mon post ci dessus
( Oui j'ai édité mon post ci dessus  )
)
Il s'agit d'un bout de code que j'ai pris d'un autre projet avec un moteur droit et un moteur gauche ... ^^ ( Qui sera utilisé pour les codes d'exemple cocotix et autre que j'aimerais bien sortir un jour sous forme de tutoriels... ^^ )
Et puis bon vu que ce projet est un projet collaboratif j'ai bien envie de mettre un peu la main à la patte
Mais il faudrait séparer le sujet en plusieurs genre :
Discussion générale ,
Mécanique...
Elec ..
Prog ...
Ainsi on pourra vraiment favoriser le partage de manière ordonnée.
Genre dans mécanique on aura un sujet récapitulant les fichier STL pour tel version etc..
Dans géneral on aura un sujet qui traite de comment réorganiser les catégories si besoin
Je te laisse ouvrir ces sujets au fur et à mesure, moi j'organise le forum pour qu'il corresponde à ce que tu souhaites =)
- thermo_nono aime ceci
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#59
-

- Modérateur
-
- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 04 août 2018 - 06:06
- thermo_nono aime ceci
#60
-
- Membres
-
- 825 messages
Membre passionné
Posté 04 août 2018 - 06:19
il faudrait séparer le sujet en plusieurs genre :
Discussion générale ,
Mécanique...
Elec ..
Prog ...
Ainsi on pourra vraiment favoriser le partage de manière ordonnée.
Genre dans mécanique on aura un sujet récapitulant les fichier STL pour tel version etc..
Dans géneral on aura un sujet qui traite de comment réorganiser les catégories si besoin
Je te laisse ouvrir ces sujets au fur et à mesure, moi j'organise le forum pour qu'il corresponde à ce que tu souhaites =)
ok, je vais faire ça ce soir..
Pourquoi ne pas faire une carte avec tout dessus et à glisser dans le slot où il y a les pins moteur ?
c'est une excellente idée.. bon pour le moment c'est un prototype, mais en effet, bricoler un shield qui se branche à la fois sur le nano et le connecteur du moteur ce serait le top.
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




