
Yep, pas de soucis ! Je l'uploaderai dessus 

100 réponses à ce sujet
#82

Budet
-
- Membres
-

- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 27 avril 2016 - 05:43
Bonjour bonjour,
Je viens donner des petites nouvelles du robot ! Il y'a pas mal de robot à chenille en ce moment et j'admet que vos sujet sont vraiment intéressant !
J'ai un peu travailler l'aspect esthétique, je vous joins une photo pour plus de visuel
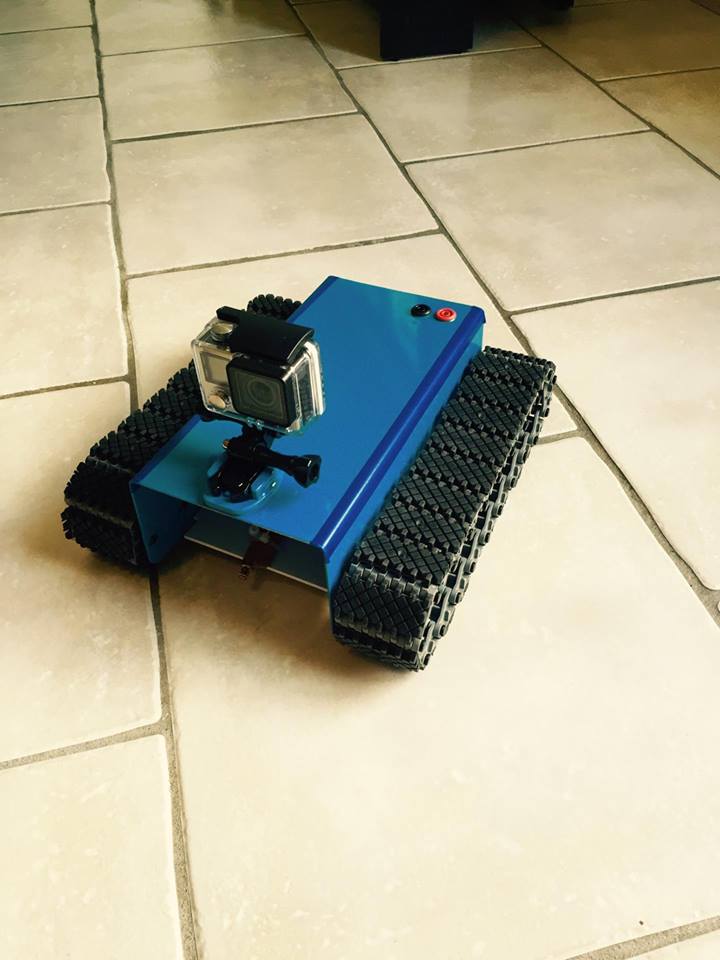
Je passe plus de temps à jouer avec qu'à travailler dessus ça ne va pas !  Du coup la précision du joystick n'est pas encore dingue et le robot ne peux pas encore tourner en avançant ce qui est handicapant !
Du coup la précision du joystick n'est pas encore dingue et le robot ne peux pas encore tourner en avançant ce qui est handicapant !
Beaucoup de personnes mettent leurs exploits en franchissement d'obstacles alors je vous met les "prouesses" de mon petit tank !
J'attend la livraison de ma batterie afin de le rendre autonome et de m’affranchir de ces fils ! Je suis entrain de dessiner les plans de ma télécommande, je compte la faire imprimer car sa forme s'annonce vraiment bizarre !
Dites moi si vous voulez voir une vue depuis la Gopro
Merci à tous
Image(s) jointe(s)

#83
Mike118
-

- Administrateur
-
- 10â¯303 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 28 avril 2016 - 07:10
Vraiment sympas =)
Bonne continuation pour la suite
N'hésite pas à lui faire une petite présentation sur le robotscope histoire qu'il laisse sa petite trace pour la postérité !!
PS : Pour ceux qui trouvent qu'on radote un peut trop sur le fait de poster les robot sur le robotscope sachez qu'en fait nous avons pour projet de mettre en valeur vos créations sur le robotscope ( mais seulement une fois que le projet shop sera mis en place : un projet à la fois ) #teasing!
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#84
Oracid
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 28 avril 2016 - 10:24
Bon début !
J'ai déjà vu ces chenilles par ici, je crois. Tu peux nous rappeler ton fournisseur.
L'accroche a l'air excellente, d'où le magnifique retournement ...
Les maillons sont peut-être un peu grands pour cette échelle de robot, c'est peut-être cela qui génère le bruit.
J'ai déjà vu ces chenilles par ici, je crois. Tu peux nous rappeler ton fournisseur.
L'accroche a l'air excellente, d'où le magnifique retournement ...
Les maillons sont peut-être un peu grands pour cette échelle de robot, c'est peut-être cela qui génère le bruit.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#85
Microrupteurman
-

- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 28 avril 2016 - 05:16
chenille linxmotion
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#86
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 28 avril 2016 - 07:49
Ah, oui, tu me l'avais déjà dit.chenille linxmotion
Merci une nouvelle fois.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#87
Budet
-
- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 24 juin 2016 - 03:23
Bonjour tout le monde,
J'ai travaillé un peu l'autonomie de mon robot en lui rajoutant une batterie Lipo qui lui permet de se déplacer à distance pendant 2 heures (plus de fils à présent) !
Voici une petite vidéo ou on le voit en déplacement :
Comme vous pouvez le voir je suis obligé de m'arrêter pour faire tourner le robot, je vais donc travailler sur un déplacement plus fluide.
Prochain test, le balancer à l'air libre avec la go pro et tester son aspect tout terrain !!
A bientot
#88
Budet
-
- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 02 avril 2017 - 10:07
Bonjour à tous,
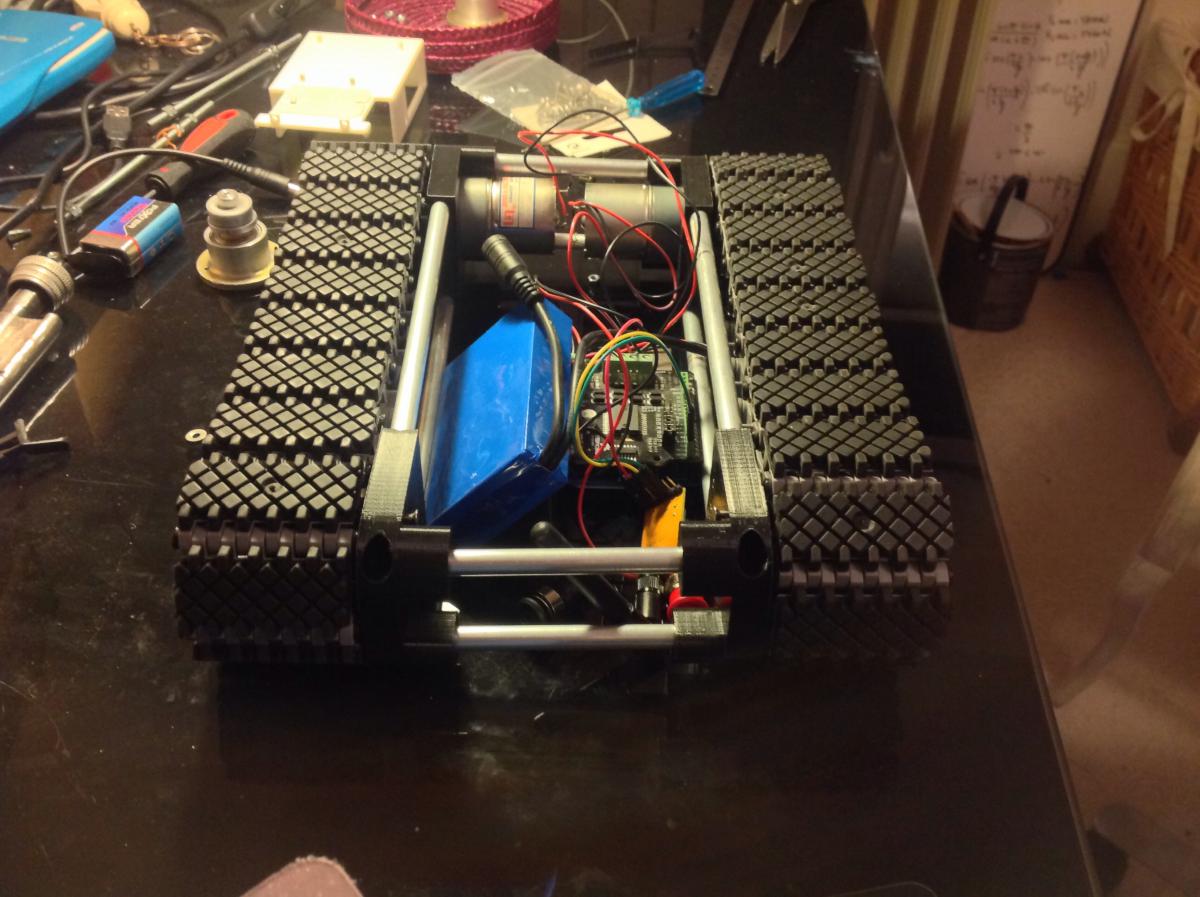
Comme certain ont pu le voir, je retravailles actuellement sur mon petit tank. Et oui, on accumule des connaissances puis on voit toutes les améliorations que l'on peu apporter à ses créations Ma première version m'a permit de mettre en pratique les bases mais aujourd'hui je n'en suis plus satisfait.
Il fallait que j'améliore l'algorithme de déplacement du robot afin qu'il puisse avoir un contrôle de sa direction plus "dynamique" (la je suis obligé de faire des arrêts pour le faire tourner). L'accès à l'électronique est vraiment pas pratique rien n'est fixé dedans, je dois tordre ma main pour allumer ou éteindre la batterie c'est vraiment encombrant....
De plus, j'aimerais qu'il assure un peu plus sa fonction de tank, je veux qu'il franchisse de gros obstacles (j'avais réussis à lui faire grimper une palette !). Sauf qu'en l'état mes tiges filetées se coincent dans mes chenilles 1 fois sur 2 lorsque je grimpe quelque chose :/ Surtout que je pense qu'il a au moins les capacités pour descendre des escaliers !
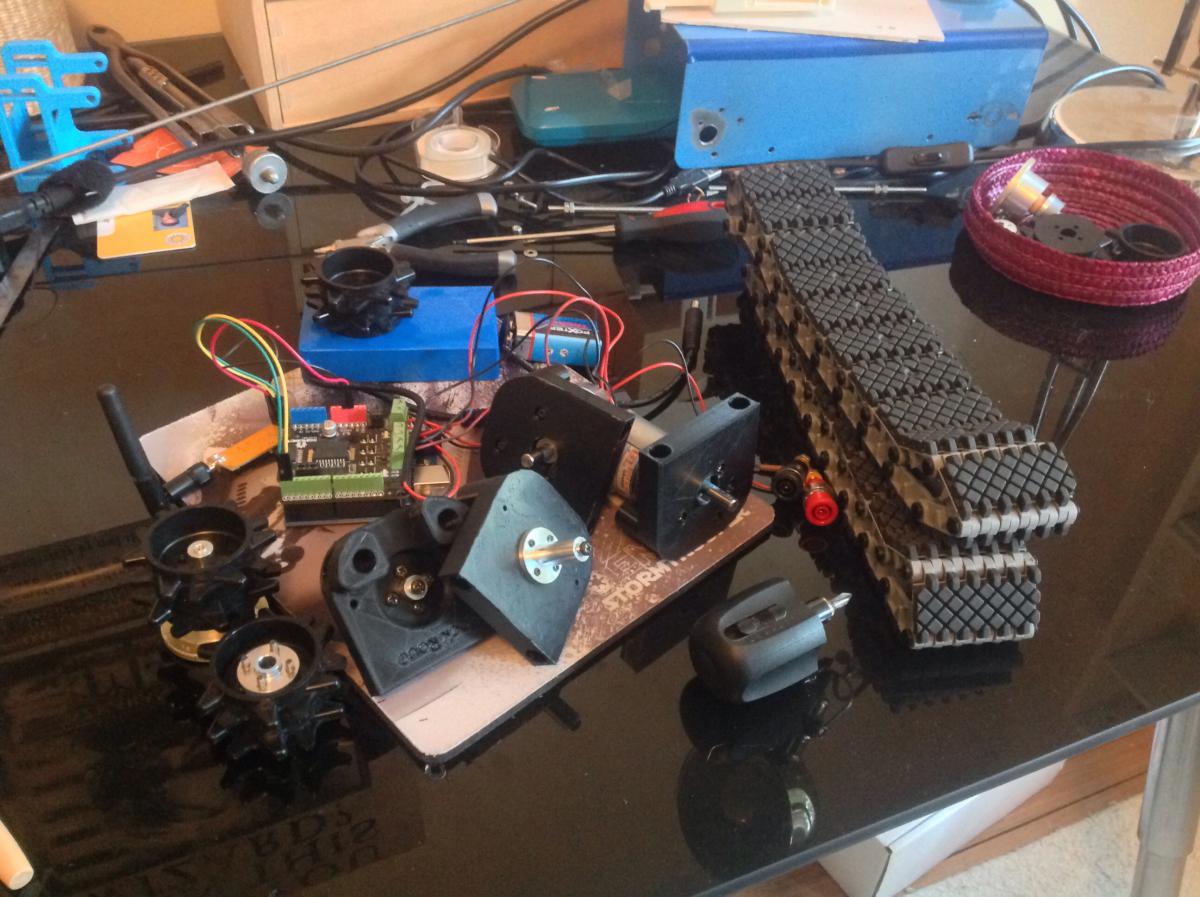
Bref vous l'aurez compris, je ne suis plus satisfait de ce que j'ai fais, du coup j'ai décidé de repartir sur une nouvelle mécanique, plus jolie, plus ergonomique, plus pratique et plus performante. Ça me permettra d'aller encore plus loin, et puis c'est ma partie préférée dans la robotique
Je suis plutôt satisfait de ma conception, les chenilles sont auto-tendu et tout est maintenu en position simplement par deux vis (grâce à un assemblage réfléchis pour) et je dois dire que ça marche bien, le montage est facile et mes roues tournes sans frottements alors que je n'utilise pas de roulements.
La suite pour le week end prochain : concevoir et monter des supports pour l'electronique (je compte les clipser aux barres) ainsi que le reste de la méca "non fonctionnelle" afin de rajouter de l'esthétisme et de le rendre plus résistant. (Une idée pour une autre couleur que le noir ? Je vais me racheter des bobines).
Je vous parlerais de la façon dont je compte coder tous ça plus tard, j'ai une bonne idée des stratégies que je vais utiliser mais j'aimerais avoir votre avis !
Merci se m'avoir lu et bon lundi à tous
Comme certain ont pu le voir, je retravailles actuellement sur mon petit tank. Et oui, on accumule des connaissances puis on voit toutes les améliorations que l'on peu apporter à ses créations
Ma première version m'a permit de mettre en pratique les bases mais aujourd'hui je n'en suis plus satisfait.Il fallait que j'améliore l'algorithme de déplacement du robot afin qu'il puisse avoir un contrôle de sa direction plus "dynamique" (la je suis obligé de faire des arrêts pour le faire tourner). L'accès à l'électronique est vraiment pas pratique rien n'est fixé dedans, je dois tordre ma main pour allumer ou éteindre la batterie c'est vraiment encombrant....
De plus, j'aimerais qu'il assure un peu plus sa fonction de tank, je veux qu'il franchisse de gros obstacles (j'avais réussis à lui faire grimper une palette !). Sauf qu'en l'état mes tiges filetées se coincent dans mes chenilles 1 fois sur 2 lorsque je grimpe quelque chose :/ Surtout que je pense qu'il a au moins les capacités pour descendre des escaliers !
Bref vous l'aurez compris, je ne suis plus satisfait de ce que j'ai fais, du coup j'ai décidé de repartir sur une nouvelle mécanique, plus jolie, plus ergonomique, plus pratique et plus performante. Ça me permettra d'aller encore plus loin, et puis c'est ma partie préférée dans la robotique
Je suis plutôt satisfait de ma conception, les chenilles sont auto-tendu et tout est maintenu en position simplement par deux vis (grâce à un assemblage réfléchis pour) et je dois dire que ça marche bien, le montage est facile et mes roues tournes sans frottements alors que je n'utilise pas de roulements.
La suite pour le week end prochain : concevoir et monter des supports pour l'electronique (je compte les clipser aux barres) ainsi que le reste de la méca "non fonctionnelle" afin de rajouter de l'esthétisme et de le rendre plus résistant. (Une idée pour une autre couleur que le noir ? Je vais me racheter des bobines).
Je vous parlerais de la façon dont je compte coder tous ça plus tard, j'ai une bonne idée des stratégies que je vais utiliser mais j'aimerais avoir votre avis !
Merci se m'avoir lu et bon lundi à tous
Image(s) jointe(s)
#89
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 03 avril 2017 - 06:53
Je t'invite à jeter un coup d'œil à ma chaine vidéo, lien en signature. En commençant par les vidéos #7 et #12, mais toutes ont un intérêt, enfin c'est ce que je pense...De plus, j'aimerais qu'il assure un peu plus sa fonction de tank, je veux qu'il franchisse de gros obstacles (j'avais réussis à lui faire grimper une palette !). Sauf qu'en l'état mes tiges filetées se coincent dans mes chenilles 1 fois sur 2 lorsque je grimpe quelque chose :/ Surtout que je pense qu'il a au moins les capacités pour descendre des escaliers !
Je ne connais pas la taille de ton char ni la capacité d'accroche de tes chenilles.
Pour l'instant, ne parlons pas de la hauteur de l'angle d'attaque de ton char, quelques centimètres suffisent. Ton char fera l'affaire.
Il y a plusieurs sortes d'obstacles. Une grosse pierre pourra paraître infranchissable, pourtant si sa succession d'angles d'attaque est inférieur à 90°, ton char la franchira, à condition que l'accroche des chenilles soit bonne, même si elle a la taille d'une montagne.
A l'inverse, une petite marche qui a par définition a un angle d'attaque à 90° posera certain problème en fonction de la taille du char. Plus ton char sera long et plus ta marche pourra être haute. Attention, le franchissement d'une marche est un problème différent du franchissement de plusieurs marches, comme un escalier. Pour un escalier, le char doit avoir la longueur qui sépare 3 nez de marche. Environ 60cm pour des escaliers courants qui ont une hauteur de 17cm. C'est normalisé, les escaliers.
Reste le problème du nez de marche, c'est la partie en porte à faux de la marche. Là, il faudra que l'angle d'attaque de ton char, c'est à dire la hauteur de l'axe du barbotin, soit légèrement plus haut que la marche, 18cm suffiront.
Si je peux t'être utile, n'hésite pas à poser des questions.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#90
Budet
-
- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 03 avril 2017 - 07:40
Merci Oracid pour cette réponse !
J'ai déjà vu tes vidéo, je suis abonné à ta chaine très intéréssantes, tu as beaucoup de connaissances sur le domaine du francissement d'obstacle.
très intéréssantes, tu as beaucoup de connaissances sur le domaine du francissement d'obstacle.
Mon tank est plutôt petit, 28cm de long, 6cm de haut et peut être 20 de large (si on prend en compte les chenilles) donc pas du tout dans les dimensions que tu donnes... C'est pour quoi je pense qu'il peut au moins descendre les escaliers mais les monter c'est une autre histoire !
Je verrais ce que ça donne avec les premiers essais parce que les chenilles accrochent très bien et les angles des obstacles se prennent facilement entre les chaines ce qui m'avait permit de gravir des obstacles plus grands que mon robot
À voir ce que les prochains tests donneront
J'ai déjà vu tes vidéo, je suis abonné à ta chaine
très intéréssantes, tu as beaucoup de connaissances sur le domaine du francissement d'obstacle.Mon tank est plutôt petit, 28cm de long, 6cm de haut et peut être 20 de large (si on prend en compte les chenilles) donc pas du tout dans les dimensions que tu donnes... C'est pour quoi je pense qu'il peut au moins descendre les escaliers mais les monter c'est une autre histoire !
Je verrais ce que ça donne avec les premiers essais parce que les chenilles accrochent très bien et les angles des obstacles se prennent facilement entre les chaines ce qui m'avait permit de gravir des obstacles plus grands que mon robot
À voir ce que les prochains tests donneront
#91
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 03 avril 2017 - 01:07
Oui, ce serait sympa, une nouvelle vidéo avec franchissement d'obstacles.
Commence par franchir une règle, puis une plus grosse, etc.
Seul le franchissement d'obstacle à 90° est significatif, sinon j'ai aucun doute sur le fait que ton char puisse gravir une montagne.
Commence par franchir une règle, puis une plus grosse, etc.
Seul le franchissement d'obstacle à 90° est significatif, sinon j'ai aucun doute sur le fait que ton char puisse gravir une montagne.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#92
Budet
-
- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 12 avril 2017 - 06:07
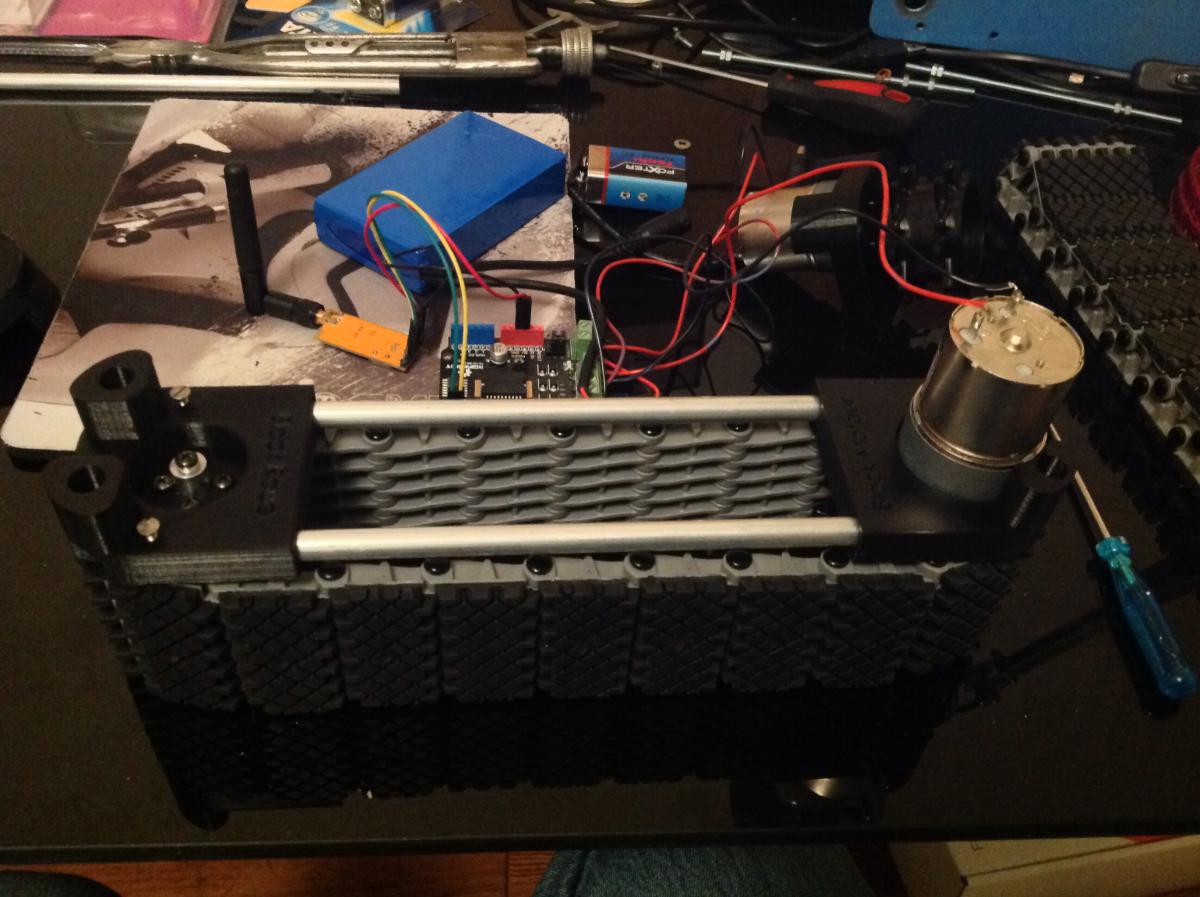
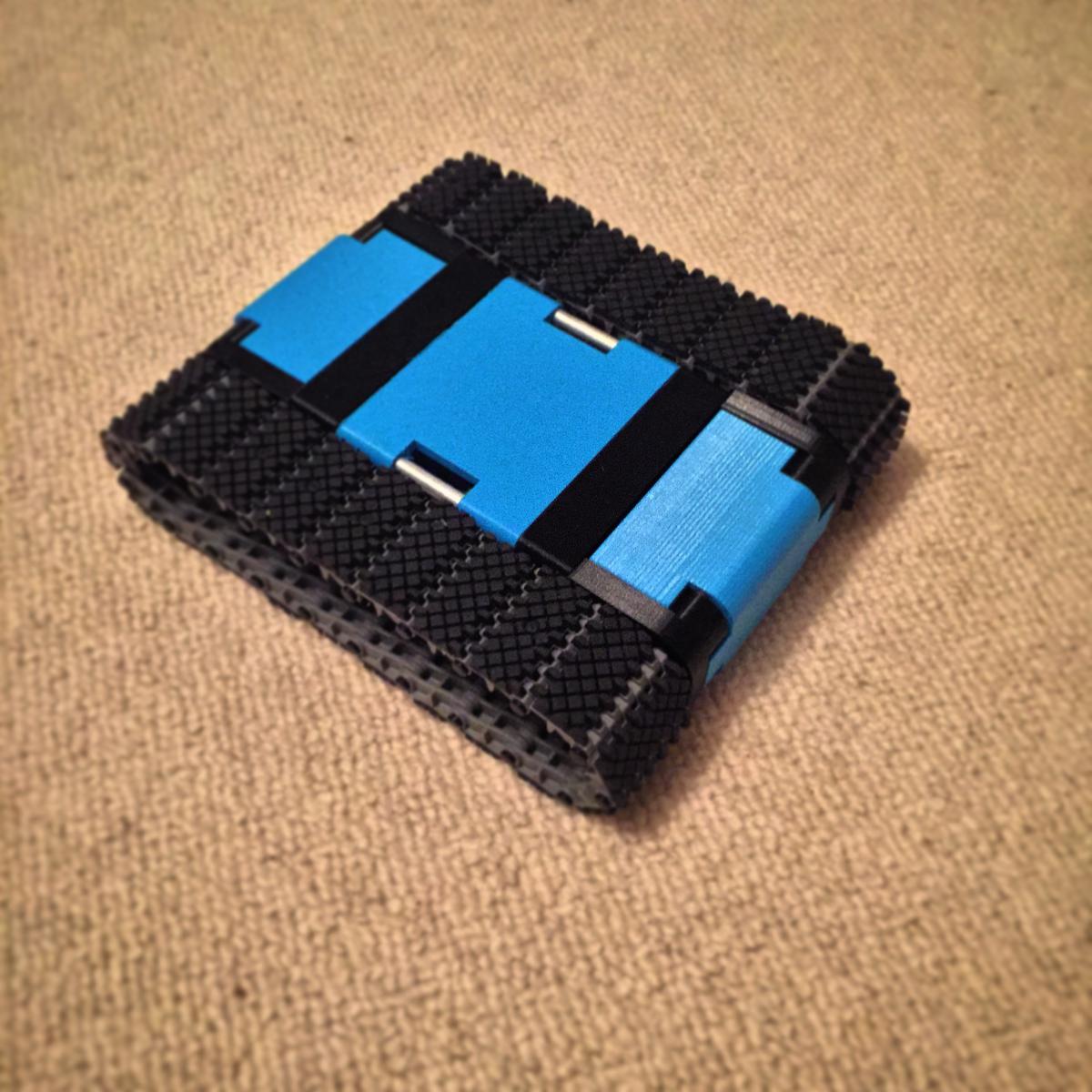
Une petite photo pour vous montrer l'avancement ! Il me reste le carter pour les moteur à imprimer ainsi que celui à l'avant (pour fixer l'antenne dessus) et le ribot sera mécaniquement finis ! 
J'en profiterais pas tester ses capacités et de vous faire une video avant d'améliorer son code
J'en profiterais pas tester ses capacités et de vous faire une video avant d'améliorer son code
Image(s) jointe(s)


#95
Budet
-
- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 08 mai 2017 - 11:24
Salut à tous !
J'avoue que je n'avance pas super vite sur ce projet mais je compte vraiment le finir incessamment sous peu pour enfin clore ce post que j'ai débuté il y a des années
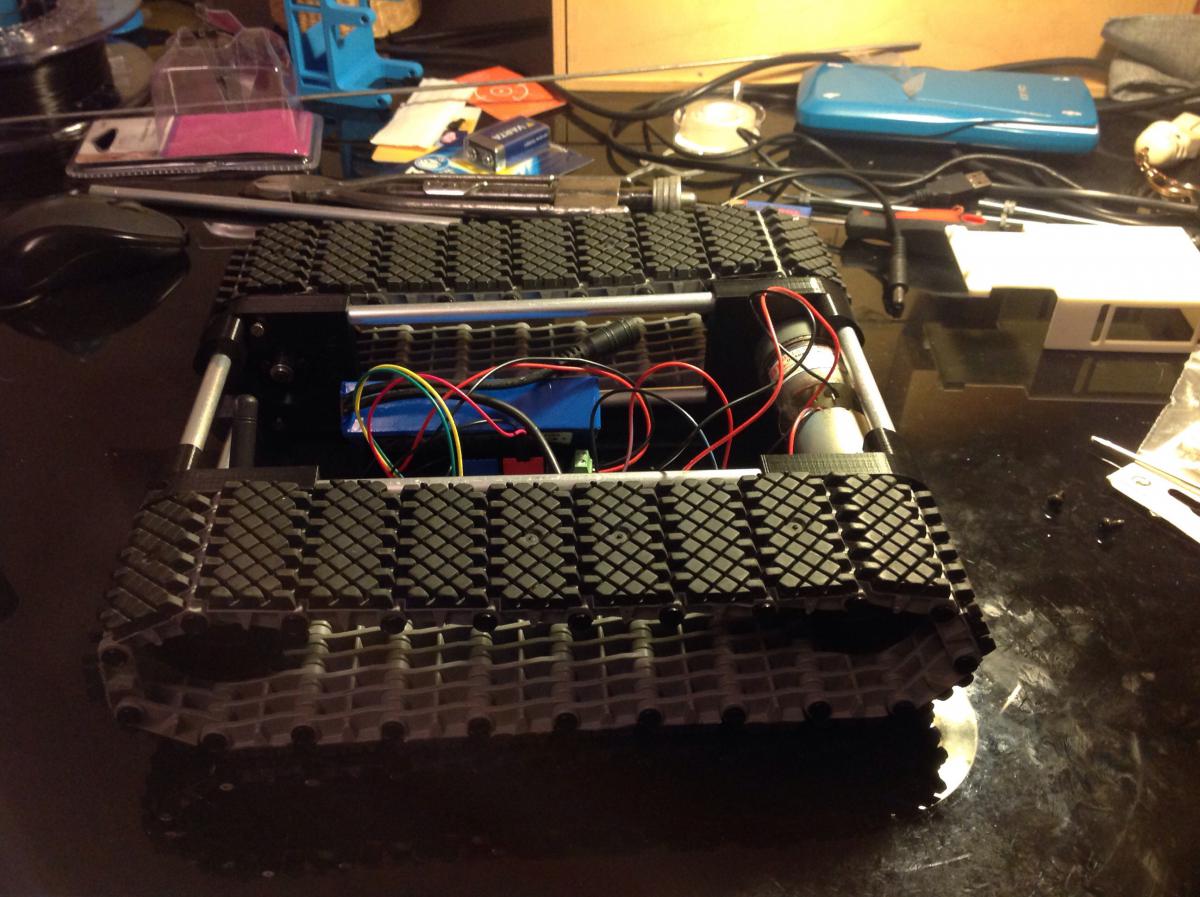
J'ai définitivement finis la mécanique du robot ! (voir image). Toute l'electronique est correctement cablé et il fonctionne toujours aussi bien. Il ne me reste plus qu'à concevoir une méca pour la télécommande (qui est faite elle aussi) et à paufiner mon code pour avoir un pilotage plus agréable.
Allez je m'accroche, c'est bientôt la fin
J'avoue que je n'avance pas super vite sur ce projet mais je compte vraiment le finir incessamment sous peu pour enfin clore ce post que j'ai débuté il y a des années
J'ai définitivement finis la mécanique du robot ! (voir image). Toute l'electronique est correctement cablé et il fonctionne toujours aussi bien. Il ne me reste plus qu'à concevoir une méca pour la télécommande (qui est faite elle aussi) et à paufiner mon code pour avoir un pilotage plus agréable.
Allez je m'accroche, c'est bientôt la fin
Image(s) jointe(s)
#96
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 09 mai 2017 - 05:53
Super propre, la finition ! Très pro !
A mon avis, un kit serait envisageable.
A mon avis, un kit serait envisageable.
Ma chaine YouTube : https://www.youtube..../oracid1/videos


#98
Budet
-
- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 09 mai 2017 - 01:57
Merci beaucoup ! Oui je suis d'accord avec toi Oracid, un kit serait facilement realisable. J'ai la CAO (donc stl) de toutes mes pièces, il y a peu de composants à acheter et le code a juste besoin d'être uploadé dessus
#99
yougo
-

- Membres
-
- 235 messages
Membre occasionnel
Posté 12 mai 2017 - 06:13
vraiment super stylé le design fait super pro !

Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




