Contenu de Lehrse
Il y a 53 élément(s) pour Lehrse (recherche limitée depuis 23-juin 13)
Par type de contenu
Voir pour ce membre
#61444 Robot basée sur arduino + presentation
 Posté par
sur 12 septembre 2014 - 09:05
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 12 septembre 2014 - 09:05
dans
Conseils et aide aux débutants, livres et kits en robotique
#59518 Cocotix pour TPE
Posté par
sur 25 janvier 2014 - 11:52
dans
Aide et question concernant le cocotix original
#59528 Cocotix pour TPE
Posté par
sur 25 janvier 2014 - 03:52
dans
Aide et question concernant le cocotix original

elle vient du tuto.
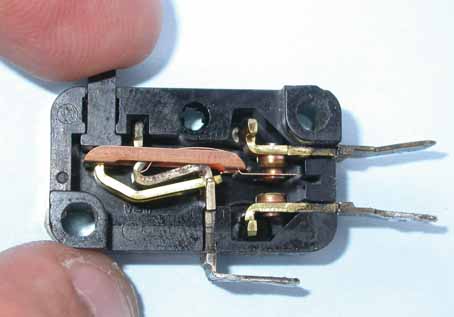
Les microrupteurs
 Nous allons voir ici le fonctionnement des capteurs du robot.
Nous allons voir ici le fonctionnement des capteurs du robot.Les microrupteurs de ce robot sont en fait des interrupteurs updd (ou switch), pour Unie Pole Double Direction.
Sur cet interrupteur, on peut distinguer 3 indications : C, NO, et NC.
C signifie commun, c'est le point de branchement qui ne change pas.
NC se traduit par Normally Close. Lorsque l'interrupteur n'est pas actionné, le courant passe par NC.
NO, est l'acronyme de Normally Open. Lorsque l'interrupteur n'est pas actionné, la partie du montage branchée à NO est ignorée. Mais quand l'interrupteur est actionné, le courant passe par ce point de branchement.
Voila un interrupteur UPDD à l'intérieur :
Voilà, maintenant que vous avez compris cela, je vais pouvoir vous expliquer l'ensemble du circuit.
Maintenant que vous avez compris comment fonctionnent les interrupteurs UPDD, je vais vous expliquer le circuit électronique avec l'ensemble des composants.
Le schéma du robot
Voici le schéma du robot :
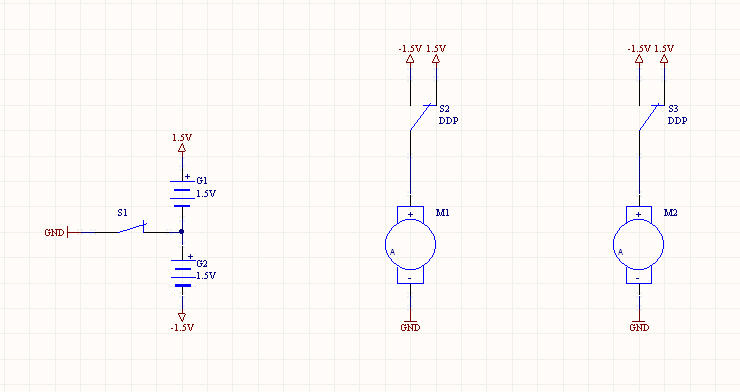
Si les interrupteurs ne sont pas enclenchés, voila comment circule le courant :
Les deux moteurs tournent dans le même sens.
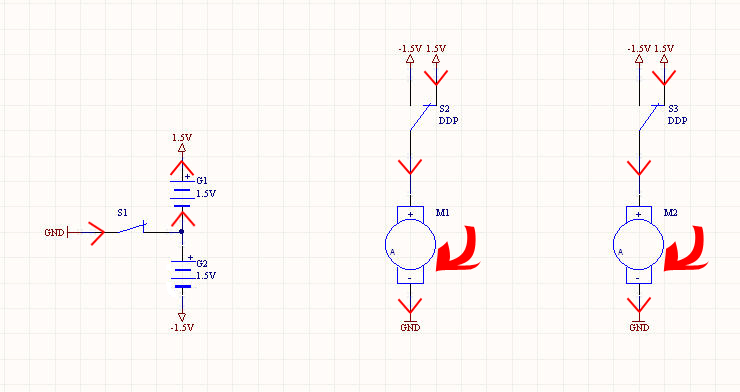
Mais maintenant, imaginons qu'un des interrupteurs soit enclenché, celui de gauche par exemple :
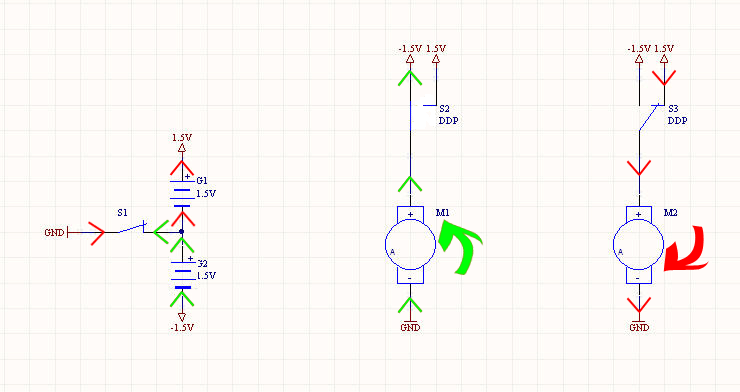
Lorsqu'un des interrupteurs est sur position NC, c'est la deuxième pile qui prend le relais. Celle-ci est branchée à "l'envers" de la première.
Le moteur tourne donc dans l'autre sens.
Résultat : le robot tourne et évite l'obstacle.
Vous comprenez le principe?
L'interrupteur
J'ai rajouté un interrupteur ON/OFF pour arrêter le robot, sinon, il faudrait enlever les piles pour le stopper: ce n'est pas très pratique.
Voilà, maintenant vous savez tout sur ce robot.
Tout ça vient du tuto, explique nous ce que tu ne comprends pas la dedans
#60707 Premier robot
Posté par
sur 17 mai 2014 - 06:28
dans
Conseils et aide aux débutants, livres et kits en robotique
#60705 Premier robot
Posté par
sur 17 mai 2014 - 04:11
dans
Conseils et aide aux débutants, livres et kits en robotique
#61061 [resolu] Ajouter une erreur dans une condition
Posté par
sur 13 juillet 2014 - 03:11
dans
Programmation
#61058 [resolu] Ajouter une erreur dans une condition
Posté par
sur 13 juillet 2014 - 03:02
dans
Programmation
if ((sensorValue + error) >= sensorValue1 && (sensorValue - error) <= sensorValue1)
{
//instructions
}si sensorValue1 est infèrieur ou égale à sensorValue + error et que sensorValue1 est supérieur ou égale à sensorValue - error faire les instructions
comme ça ?
#61055 [resolu] Ajouter une erreur dans une condition
Posté par
sur 13 juillet 2014 - 02:25
dans
Programmation
if ((sensorValue + error) == sensorValue1 || (sensorValue - error) == sensorValue1)
{
//instructions
}si sensorValue1 est égale à sensorValue + error ou si sensorValue1 est égale à sensorValue - error faire les instructions
#61443 25 000 E pour un projet ( concours )
Posté par
sur 12 septembre 2014 - 07:57
dans
Concours tournois et autres compétitions
#59176 Les robots dans la fiction
Posté par
sur 01 janvier 2014 - 09:27
dans
Bric-à-brac
Dans le films, tu pourrais aussi ajouter une partie documentaire
Je pense qu'il te manque quelque truc d'ici
#63261 Apérobo 1.0 en Belgique le 14-01-2015
Posté par
sur 03 janvier 2015 - 03:00
dans
Apérobots et autres rencontres IRL
Salut Esprit,
je viens aussi de namur et ton apérobo m'intèresse mais je voulais savoir si tu savais s'il y allait y avoir beaucoups de monde et quel type (amateur, débutant, professionel...) car j'aimerais rencontrer des professionels pour parler un peu de leur métier.
Je ne sais pas encore si je vais venir mais je te tiendrais au jus.
Lehrse
#58661 Pince de robot gardien de but
Posté par
sur 11 décembre 2013 - 09:51
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
#60354 Robot qui écrit un mot sur une feuille
Posté par
sur 27 mars 2014 - 10:05
dans
Aide pour projets scolaire
#64740 Batterie et moteur pour un nouveau robot
Posté par
sur 27 juin 2015 - 05:37
dans
Conseils et aide aux débutants, livres et kits en robotique
Salut à tous,
il y a un moment, j'avais réalisé une toute petite base roulante à base d'arduino et je voulais tenter de passez à une base un peu plus grande pour me permettre d'expérimenter (capteurs,...) j'avais commandé des servos moteurs et je m'étais rendu compte qu'ils n'étaient pas assez costaud. On m'a conseillé de passer à des moteurs + motoréduteurs. Et donc maintenant que j'ai plus de temps je voudrais retourner à ce projet, par contre je ne sais pas si mes choix sont bon:
-Choix 1 :
2 moteurs + 1 assemblage de motoréduction : http://www.robotshop.com/en/tamiya-twin-motor-gearbox.html
Des roues : http://www.robotshop.com/en/tamiya-off-road-tires.html
Prix: 13.12
Une petite question, est ce que l'axe est séparé en 2 ou si les deux moteurs agissent sur le même axe
-Choix 2:
2 * 1 moteur + 1 motoréducteur: http://www.robotshop.com/en/solarbotics-gm9-gear-motor-9.html
2 * 1 roue: http://www.robotshop.com/en/solarbotics-gmw-gear-motor-mounts.html
Prix: 17.74
je suppose que c'est plus facile d'attacher ave ça: http://www.robotshop.com/en/solarbotics-gmb39-gear-motor-bracket.html
par contre est ce que les roues auront suffisament d'adhérence
-choix 3:
1 kit (moteur, roue, motoréducteur): http://www.robotshop.com/en/65mm-blue-wheel-dc-motor-pair.html
Prix : 17.60
Il y a un moyen pour l'attacher efficacement ?
-choix 4
....
Ps: Il est bien possible de commander ces moteurs pas Un SN754410 (remplacement compatible de broche en broche du L293D)
Ensuite, on m'a aussi conseillé de prendre une batterie pour alimenter mon arduino, mes moteurs +... mais là je ne sais vraiment pas quoi choisir.
Merci d'avance pour votre aide
#64761 Batterie et moteur pour un nouveau robot
Posté par
sur 02 juillet 2015 - 06:36
dans
Conseils et aide aux débutants, livres et kits en robotique
Merci de vos réponses, je vais donc, comme tu me l'as indiquer Sparda, rechercher ma batterie et puis des moteurs appropriés.
#64839 Batterie et moteur pour un nouveau robot
Posté par
sur 11 juillet 2015 - 05:16
dans
Conseils et aide aux débutants, livres et kits en robotique
Merci à vous,
j'ai regardé sur ton lien et je pense avoir trouvé ma batterie:
-Accu modélisme NiMh 7,2V 1,1Ah ou Accu modélisme NiMh 9,6V 1,1Ah
le choix dépendra de mon moteur pour le voltage je pense à moins que vous me conseiller l'un ou l'autre car la diffèrence de prix n'est que de 2euros
Je pars donc à la recherche sur ce site de moteurs(+motoréducteur) et roues. Mais j'ai une petite question concernant le couple:
j'ai approximé mon robot à 3 Kg (j'ai pesé ma base qui fait à peu près 500 g, devrais je prévoir un poids plus important pour le reste du robot) avec des roues de maximum 4 cm de rayon j'obtiens un couple de 1.17Nm, je vais arrondir à 1.5Nm pour ne pas me bloquer par la suite. ma question est donc est ce que chaque moteur doit "posséder" ce couple ou la somme des couples doit surpasser ce niveau?
edit:
je pense avoir trouvé mes moteurs + roues et fixation avec un couple de 3.1 Kg.cm mais si je transforme mon couple de 1.5Nm en Kg.cm j'obtiens 15 Kg.com, ce qui me semble énorme.
#64824 Batterie et moteur pour un nouveau robot
Posté par
sur 10 juillet 2015 - 03:07
dans
Conseils et aide aux débutants, livres et kits en robotique
Alors j'ai regardé un peu sur robotshop pour ma batterie, mais j'ai très peu trouvé de batteries 7V < et n'étant pas trop chères.
Avez vous des sites à proposez ou plusieurs pile 9V en parallèles, c'est ok ?
#59447 Mes composants sont-ils bons ?
Posté par
sur 20 janvier 2014 - 05:50
dans
Reventes, matériel d'occasion, récup
#59213 Mes composants sont-ils bons ?
Posté par
sur 03 janvier 2014 - 03:36
dans
Reventes, matériel d'occasion, récup
Je me suis trompé
 . je voulais dire interrupteur et non moteur.
. je voulais dire interrupteur et non moteur.Tu peux choisir 1RT si tu veux économiser et 2RT si tu compte le réutilisé. (1RT est suffisant)
#59215 Mes composants sont-ils bons ?
Posté par
sur 03 janvier 2014 - 05:04
dans
Reventes, matériel d'occasion, récup
#59177 Mes composants sont-ils bons ?
Posté par
sur 01 janvier 2014 - 09:36
dans
Reventes, matériel d'occasion, récup
Je pense que tu pourra souder sur ton support sans problème.
Un inverseur peut être utilisé comme interrupteur. 1RT signifie que tu peux inverser un circuit et 2RT signifie que tu peux inverser 2 circuits.
Je dirais le premier mircrorupteur car il me semble qu'il sera plus facile d'allonger la tige pour détecter les obstacles.
#60644 Roue compatible pour un servo ?
Posté par
sur 01 mai 2014 - 09:03
dans
Reventes, matériel d'occasion, récup
#60647 Roue compatible pour un servo ?
Posté par
sur 02 mai 2014 - 04:45
dans
Reventes, matériel d'occasion, récup
Est ce que les servos sont fournis avec des palonniers (il n'y en a pas sur la photo)? Car sinon je pourrais faire les roues moi-même comme sur ce tuto de webmaster.
Lehrse
#59106 Présentation
Posté par
sur 30 décembre 2013 - 09:47
dans
Et si vous vous présentiez?

N'hésite pas à demander de l'aide.
#64877 Solution Hydrophobe ?
Posté par
sur 18 juillet 2015 - 11:48
dans
Bric-à-brac
peut être une réduction active du bruit en utilisant le principe de superposition d'onde




