 Posté par
Posté par

Oui c'est vrai que sa ressemble beaucoup, normal Léon ton BOB3 est ma source d'inspirations
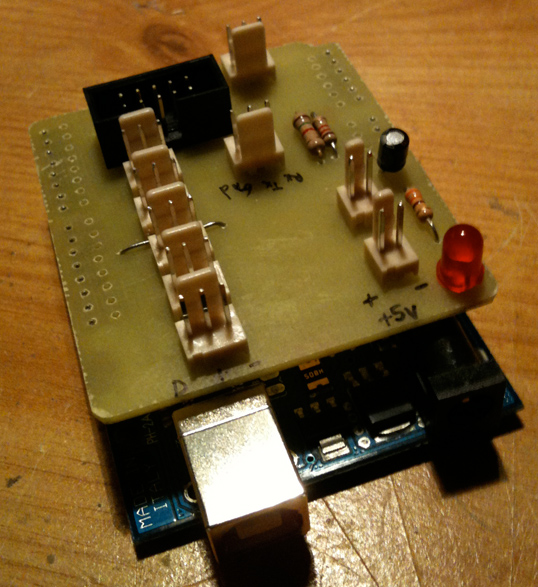
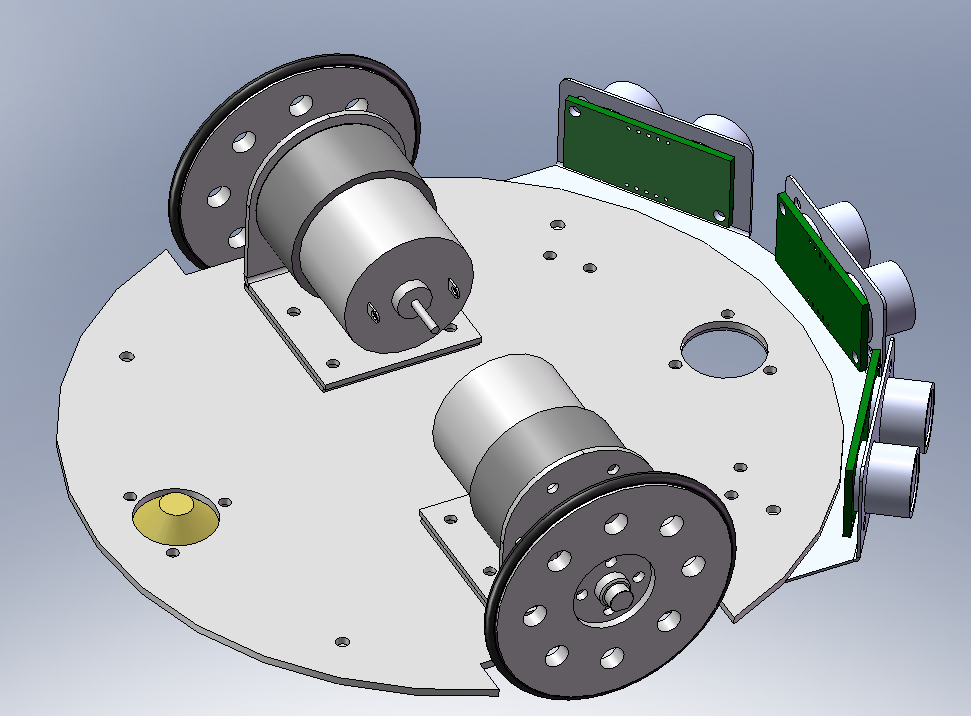
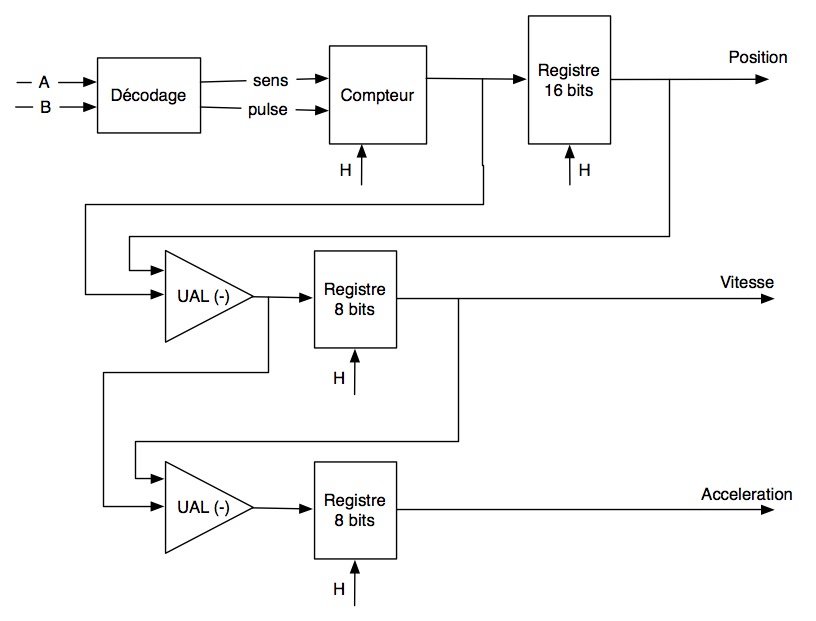
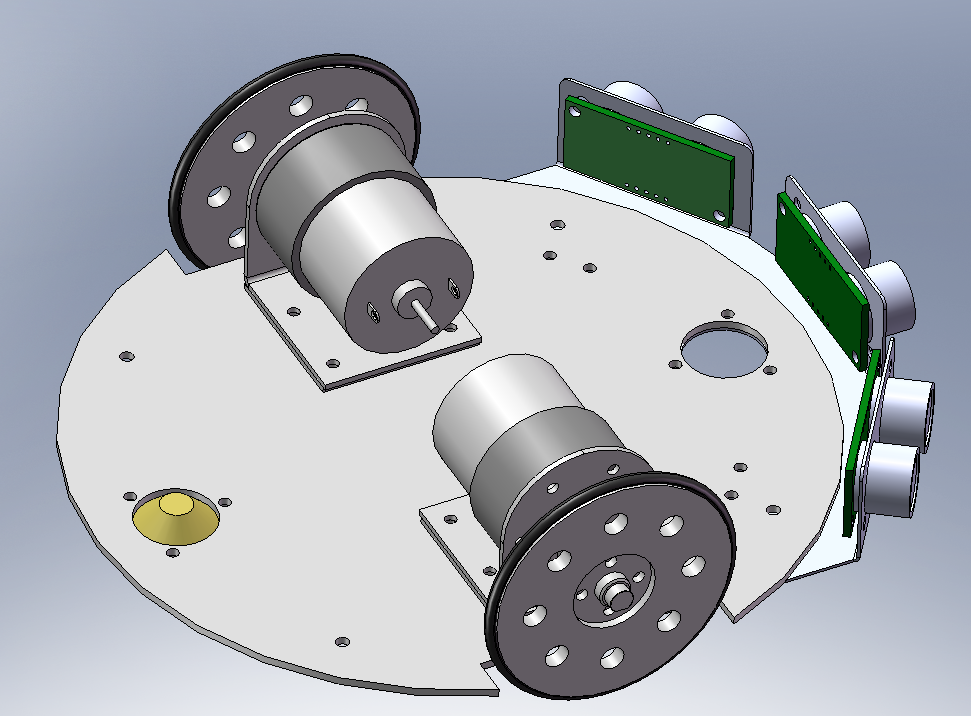
C'est tout a fait ça. La roboard ne sera montée qu'après que tout l'asservissement "simple" soit fonctionnel. J'ai une toute première version "beta" de la carte à cpld pour le décodage des signaux en quadrature qu'il faut que je teste branchée à l'arduino. ça devrait donc pas tarder à avancer si je suis pas trop mauvais pour calculer et coder mon PID.













{kind=link}
{kind=link}