Oui, il y a un grand parking sur place.
Super !
Peux-tu nous en dire plus ? Gratuit, payant, place garantie, réservé aux compétiteurs, à quelle distance du site ?
Peut-on présenter 2 robots ?
Il y a 1000 élément(s) pour Oracid (recherche limitée depuis 07-juillet 14)
 Posté par
sur 28 septembre 2022 - 08:11
dans
TRR : Toulouse Robot Race
Posté par
sur 28 septembre 2022 - 08:11
dans
TRR : Toulouse Robot Race
Oui, il y a un grand parking sur place.
Super !
Peux-tu nous en dire plus ? Gratuit, payant, place garantie, réservé aux compétiteurs, à quelle distance du site ?
Peut-on présenter 2 robots ?
Posté par
sur 28 septembre 2022 - 06:35
dans
TRR : Toulouse Robot Race
Question:
Y a-t-il un parking, sur place ?
Posté par
sur 27 septembre 2022 - 08:01
dans
Robots roulants, chars à chenilles et autres machines sur roues
Oui tu as raison je vais commencer par le test manuel.
J'ai fait mes tests sur 2 moteurs, et ils ne fonctionnent pas de la même manière.
Il vaut donc mieux éliminer les problèmes, à la base.
Posté par
sur 27 septembre 2022 - 06:41
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je pense que 8A, c'est en 7.4V et 12A en 5V ou 6V.
Sur mon gros quadrupède, j'alimentais les servos en 6V avec une batterie 2S (7.4V) de 3600mA. Ce qui fait 300mA par servo MG996R. Ce n'est pas beaucoup.
Sur mes derniers quadrupèdes, les servos sont alimentés directement par une batterie 2S (7.4V) de 850mA. Cela fait environs 70mA par servo.
Ils sont donnés pour 70mA . . . . . à vide, pour les Geekservo. Pour les MG92B, je n'ai pas l'information.
Pourtant ces quadrupèdes fonctionnent parfaitement, sauf le grand, mais pour d'autres raisons.
Il y a donc un vrai problème. Comment se fait-il que mes quadrupèdes fonctionnent avec si peu de courant ?
Je ne sais pas vraiment. Peut-être que la bibliothèque Servo de l'Arduino, n'alimente pas les servos simultanément, mais successivement.
En fait, en raison de mon ignorance, je ne me suis pas posée la question.
De ce fait, je suis obligé de tester. Je commence petit. Si cela fonctionne, je fais un peu plus grand. Si cela ne fonctionne pas, je refait plus petit.
C'est très difficile de faire quelque chose de parfait du premier coup, même si on est très savant.
Il faut tester, retester, et tester encore . . . . et accepter les échecs.
Posté par
sur 27 septembre 2022 - 05:16
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je n'ai pas ce driver qui semble être le JYQD-V7.3E2 par JYITECH.
J'ai le ZS-X11B par RioRand qui lui ressemble beaucoup et qui a été remplacé par le ZS-X11H.
J'attends avec beaucoup d'impatience le résultat de tes tests.
As-tu fait le test en manuel ? Je pense qu'il le décrit dans la partie 1.
Il faut peut-être commencer par-là, pour voir si le moteur tourne avant de le tester avec un Arduino.
Je suppose que tu veux faire un Forward.
Regarde ton code, l'ordre des instructions est différent de celui proposé et le premier delay() également.
void wheelMoveForward(){
analogWrite(m1_VR_speed, speed1);
digitalWrite(m1_EL_Start_Stop,LOW);
delay(1000);
digitalWrite(m1_ZF_Direction,HIGH);
delay(1000);
digitalWrite(m1_EL_Start_Stop,HIGH);
}
Posté par
sur 27 septembre 2022 - 02:25
dans
Bric-à-brac
Pourrais-tu nous mettre quelques photos de ton Truck, ou un lien, ainsi que de ta batterie d'origine et de la batterie actuelle ?
A quelle date as-tu acheté cette dernière batterie ? L'as-tu utilisé très souvent ?
Posté par
sur 27 septembre 2022 - 01:32
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
J'ai essayé de faire un gros quadrupède avec des MG996R (pas MG995), mais sans succès. https://www.robot-ma...-big-quadruped/
Pour l'alimentation, je ne me suis pas pris la tête, j'ai utilisé, ça, https://fr.aliexpres....27426c37pMlK8det j'ai connecté les servos directement en sortie de 5V, ou 6V, ou 7.4V. Il faut tester.
Comme je n'ai pas réussi, j'aurais tendance à te déconseiller de faire un quadrupède avec ces servos.
D'un autre côté, je suis très intéressé, car si tu réussis, je m'y remets tout de suite en m'inspirant de ta réalisation.
Peut-être que mon erreur était de vouloir faire un 12DOF, beaucoup trop lourd, au lieu d'un 8DOF.
Avant de faire un quadrupède complet, il est recommandé de faire une patte et de la tester. Tu trouveras tout cela dans mon sujet. Peut-être que cela pourrait t'inspirer, ainsi que mes autres réalisations.
D'autres, comme Briel, ont également fait des choses intéressantes, n'hésites pas à fouiller dans la rubrique quadrupède.
N'hésite pas à poser des questions.
Posté par
sur 27 septembre 2022 - 11:05
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'ai fait un test avec une R=10K et C=1u.
L'ondulation est tout à fait acceptable et la tension est d'environ 2.5V.
La vitesse du moteur est largement au-dessus de ce que je souhaite.
Donc ça me parait plutôt, pas mal.
Par contre, le moteur "broute" assez souvent au démarrage ou au changement de direction (après arrêt complet) que je fais avec un bouton relié au driver (pas à l'Arduino).
Il me semble que ce "broutage" est dû au fait que ce driver ne gère pas les capteurs Hall.
Mais, de toute façon, avec l'autre driver qui, lui, gère les capteurs Hall, cela arrive également. Alors ?!
Posté par
sur 27 septembre 2022 - 10:37
dans
Robots roulants, chars à chenilles et autres machines sur roues
Merci Sandro.
J'ai utilisé R=1000 ohms
Entre l'entrée potentiomètre et le 5V, j'ai mesuré, V_driver=0.472V
Tes calculs:
1... V_driver = 5V * r/(R+r)
2... V_driver/5V=r/(R+r)
3... (V_driver/5V)*(R+r) = r
4... r * (1-V_driver/5V)=(V_driver/5V)*R
5... r=R * 1/(5V/V_driver - 1)
En remplaçant tes variables, ligne par ligne, par mes valeurs, ça donne ça :
1... 0,472 = 5 * r / (1000 + r)
2... 0,472 / 5 = r / (1000 + r)
3... (0,472 / 5) * (1000 + r) = r
4... r * (1 - 0,472 / 5) = (0,472 / 5) * 1000
5... r = 1000 * 1 / (5 / 0,472 - 1)
6... r = 1000 / 5 / 0,528
7... r = 378,79
Par contre, déjà, je ne comprends pas ta première ligne.
Posté par
sur 27 septembre 2022 - 07:31
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'ai relié mon filtre RC passe-bas en lieu et place du potentiomètre du driver. Cela fonctionne très bien !
Petit problème, la charge.
Quand je tourne le potentiomètre relié à l'Arduino pour augmenter la vitesse, avec R=100K, la tension de commande arrive au maximum à 500mV, au lieu de 5V.
En changeant pour R=46K, je monte à 1V, et le moteur tourne plus vite.
Je savais que j'allais me cogner au problème de la charge, voir la vidéo, ici à 18'43", https://www.robot-ma...board/?p=116772
Question :
- jusqu'où puis-je descendre la valeur de R, sans cramer la sortie de l'Arduino ?
- comment mesurer la valeur de la charge (impédance ?) de l'entrée potentiomètre du driver ?
Merci d'avance pour votre aide.
Posté par
sur 27 septembre 2022 - 06:20
dans
Drone, Robot volant, et autres machines volantes
Cela montre, malheureusement, l'ouverture d'esprit des vieux aéromodélistes. (dont je fait parties)
Bof, je crois même, qu'il y a des clubs de drone, spécialisés dans le drone de vitesse, et pas les autres.
Voici un lien qui liste les clubs par département. https://comparateur-...b-Drone-rc.html
Je devrais surement trouver mon bonheur dans la liste.
Posté par
sur 26 septembre 2022 - 08:06
dans
Robots roulants, chars à chenilles et autres machines sur roues
Avec 2 voies, on peut faire beaucoup de choses, mais pas tout.
Merci Sandro. Tes remarques me confortent dans mon choix.
J'ai testé le PWM sur la pin 3 en 490Hz. Puis j'ai essayé de trouver des valeur de R et C pour les 2 fréquences, 490Hz et 980Hz.
Avec R=50K et C=1u, on obtient une bonne tension continue sans oscillations parasites et avec une réactivité vraiment très bonne.
Mais si on veut avoir quelque chose de parfait, il suffit d'avoir R=100K et C=1u. On perd très légèrement en tension, mais c'est dérisoire.
Maintenant, il ne me reste plus qu'à faire un test avec ce montage à la place du potentiomètre du driver pour faire varier la vitesse de mon moteur.
Je vais tenter un montage directement sur le connecteur Dupont avec des petits composants.
Voici une vidéo qui expose très bien certains problèmes liés au filtre passe-bas. Les choses ne sont pas si simples et j'ai vu plusieurs vidéos qui allaient très loin dans la complexité.
Je ne dirais qu'une chose, "Vivons heureux, vivons dans l'ignorance . . ."
Posté par
sur 26 septembre 2022 - 04:28
dans
Robots roulants, chars à chenilles et autres machines sur roues
4 voies 100Mhz, wow pourquoi ce choix?
Et bien, j'achète un oscilloscope tous les 40 ans. Alors, je ne voulais pas me tromper.
De plus, si je voulais voir les signaux sur les 3 voies d'un moteur Brushless, il fallait au moins ça.
Et puis, qui peut le plus, peut le moins.
Posté par
sur 26 septembre 2022 - 01:34
dans
Robots roulants, chars à chenilles et autres machines sur roues
ça marche !
Pourquoi, je ne sais pas vraiment. J'ai simplement interverti les 2 sondes.
Une sonde montre le signal PWM, l'autre montre le signal en sortie du filtre passe-bas. J'utilise la pin 5 du Nano, donc à 980Hz.
Avec une résistance de 4.7K et une capacité de 100n, je n'ai aucune oscillation et le signal va bien de 0V à 5V. Un vrai miracle !
Ce sont quasiment les même valeurs proposées dans le lien de Patrick, plus haut.
Là, j'utilise mon nouvel oscilloscope SIGLENT SDS1104X-E. C'est un 100Mhz, 4 voies. https://jeulin.com/j..._fr/295267.html
Le problème, c'est que je ne sais pas l'utiliser. Il va falloir que j'investisse un minimum de temps dans quelques vidéos sur YouTube.
Posté par
sur 25 septembre 2022 - 06:39
dans
Robots roulants, chars à chenilles et autres machines sur roues
Tu peux fabriquer cet étage de puissance toi même. C'est assez simple.
Je me suis mal fait comprendre.
Le driver, en lui-même, est assez complexe, mais l'utilisation manuel avec un potentiomètre est relativement facile à mettre en oeuvre.
Par contre, dès que l'on parle de PWM, là, ça devient très compliqué à mettre en oeuvre.
Mais bon, c'est peut-être moi qui ait abimé le driver. J'en ai commandé 2 autres dans 2 boutiques différentes, en espérant qu'une m'enverra la V1.
Ceci dit, j'ai essayé une nouvelle fois mon filtre passe bas, ça ne fonctionne plus. 
J'ai essayé comme indiqué sur ton lien, avec une résistance de 3.9K et un condensateur de 100nF.
J'obtiens un espèce de triangle avec les bords arrondis. J'ai essayé d'autres valeurs, rien à faire
J'ai reçu mon nouveau multimètre, un dimanche ! Bon, demain est un autre jour.
Posté par
sur 25 septembre 2022 - 06:17
dans
Projets logiciels, web, ou simulations
Courage ! 
Posté par
sur 25 septembre 2022 - 07:46
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'ai trouvé cette vidéo qui explique très bien l'utilisation du filtre passe-bas pour éliminer les oscillations et ne garder que la résultante continue moyenne d'un signal oscillant.
Pour la démonstration, ici, Hervé Discours utilise un simulateur en ligne, Falstad. https://falstad.com/.../circuitjs.html
Merci encore, Patrick.
La question que je me pose est, pourquoi les drivers de moteur sont-ils aussi complexes quand il faut utiliser du PWM, alors qu'il suffit d'utiliser un filtre passe-bas ?
En supposant qu'à 99%, les signaux PWM utilisés sont en 5V.
Posté par
sur 24 septembre 2022 - 06:24
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bon, j'ai fait un filtre vite fait sur une Breadbord avec une résistance d'environ 5k et un condensateur qui indique 0.73K
Et bien, cela fonctionne très bien sur la pin 5, PWM à 980Hz.
Demain, j'essayerai de trouver des valeurs plus adaptés dans mes tiroirs.
Le problème, c'est que je n'ai plus de multimètre.
Merci Patrick.
Posté par
sur 24 septembre 2022 - 03:36
dans
Robots roulants, chars à chenilles et autres machines sur roues
Il ne va pas filtrer le signal carré pour le transformer en signal à composante continue.
Ah, zut ! Je pensais que le transistor de sortie amplifiait la luminosité de la LED.
Bon, ok ! Je vais essayer de faire ce filtre.
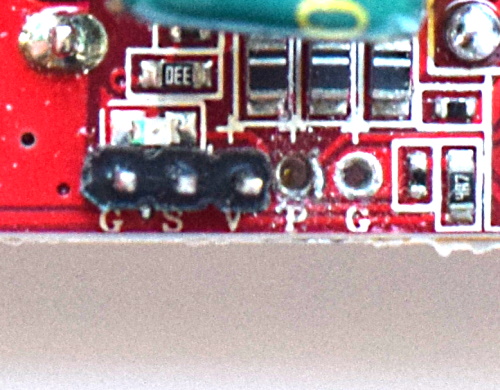
Pour Melmet. Voici une image très agrandi du point P.
Pourquoi le fabricant n'a pas mis un connecteur à 5 pins au lieu de 3 pins, c'est un mystère. D'autant que le point P est celui qui permet le PWM.
A l'origine, ce n'était même pas percé. C'est moi qui ait percé en 1mm, mais je crois que la pastille, en dessous, s'est décollé.
Peut-être, même, que j'ai abimé une piste. C'est très serré, à cet endroit.
Malheureusement, je ne peux pas faire de photo du dessous, car il y a un gros radiateur qui est collé.
Posté par
sur 24 septembre 2022 - 01:47
dans
Robots roulants, chars à chenilles et autres machines sur roues
Tu peux convertir le signal PWM en sortie de Arduino en une tension analogique en utilisant un filtre RC passe bas, dont il faut calculer la valeur de fréquence de coupure en fonction de ton besoin.
Merci Patrick.
A dire vrai, j'avais un peu peur que l'on me propose cette solution . . .
Non, l'idée, c'est vraiment d'avoir un optocoupleur relié à mon driver, avec 2 fils. Les 2 autres fils étant reliés à l'Arduino.
Mais peut-être, n'est-ce pas une bonne idée ?
Posté par
sur 24 septembre 2022 - 01:40
dans
Drone, Robot volant, et autres machines volantes
Oui, merci Mike.
J'ai déjà vu cette carte, mais ce que je recherche, c'est plutôt un club avec un terrain et des autorisations incontestables.
Je suis à la campagne, mais dans la Région Parisienne. Un luxe !
Et je vois déjà l'agriculteur avec son fusils, venir me demander de dégager au plus vite.
Je suis quand même dans le "neuf cinq" . . . 
Posté par
sur 24 septembre 2022 - 01:33
dans
Programmation
Les sorties PWM ( ~ ) de l'Arduino fournissent 2 fréquences différentes (490Hz et 976Hz) en fonction de la pin utilisée, https://www.arduino....io/analogwrite/
Mais, peut-on changer la fréquence de sortie de ces pins PWM ?
Et bien, oui ! Voici la solution :
Posté par
sur 24 septembre 2022 - 01:04
dans
Robots roulants, chars à chenilles et autres machines sur roues
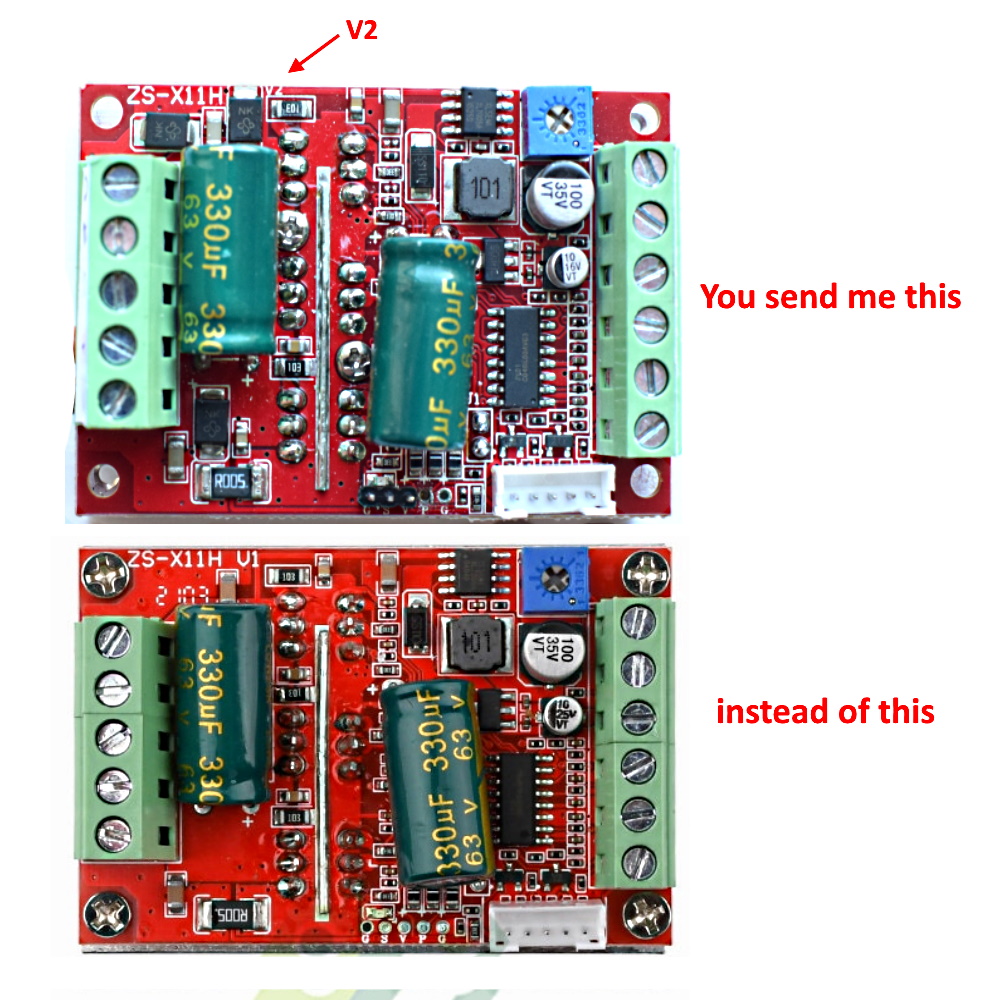
J'ai testé un driver de moteur d'HoverBoard, en me basant sur la vidéo ci-dessous.
Malheureusement le driver utilisé est un ZS-X11HV1, alors que j'ai reçu la V2 qui a un connecteur (P) pour la mise en oeuvre du PWM qui n'est pas percé. J'ai percé en 1mm, mais j'ai fait du boudin . . .
Bref grosse galère ! Un malheur n'arrivant jamais seul, je me suis aperçu, après beaucoup de tests, que mon contrôleur universel ne fonctionnait plus. J'ai failli devenir chèvre. Bien entendu, j'en ai commandé un nouveau.
De plus, indépendamment, sans PWM, en manuel, le moteur ne fonctionne pas bien, impossible d'inverser le sens de rotation.
C'est peut-être moi le problème, néanmoins, j'ai réussi à faire tourner le moteur dans les 2 sens avec un autre driver, le ZS-X11F.
Du coup, je ne sais plus où j'en suis.
Voici l'image que j'ai envoyée à mon fournisseur sur Ali.
Dans la vidéo, Mad-EE n'utilise pas un potentiomètre, mais fait varier la tension de son alimentation de laboratoire de 0V à 5V. A 6'27".
Je me suis dit, alors, pourquoi ne pas transformer le signal PWM d'un Arduino en une tension continue variable.
La plupart du temps, les tutos sur le PWM font varier l'intensité lumineuse d'une LED avec l'instruction analogWrite().
En réalité, c'est du pseudo analogique. Cela fonctionne avec une LED, mais à l'oscilloscope on peut voir que le signal est bien carré et que la tension ne varie absolument pas.
L'idée serait d'utiliser un optocoupleur avec une LED (et sa résistance !) en entrée, et un transistor délivrant une tension variable de 0V à 5V, en sortie. https://fr.wikipedia...i/Photocoupleur
Je pense que ce composant devrait remplacer un potentiomètre. Cela pour éviter de passer en mode PWM, difficile à mettre en oeuvre sur les drivers.
Alors, si vous connaissez ce composant, ce serait super de m'en donner la référence, voir un lien.
Merci d'avance.
Posté par
sur 24 septembre 2022 - 06:19
dans
Drone, Robot volant, et autres machines volantes
je ne suis pas le seul à vouloir m'affranchir de ces logiciels où tu rentre des coordonnées et que après IL fait tout sans que tu ne fasse plus rien et que tu ne comprends rien.
C'est exactement ça !
Perso, je ne suis pas sûr que le pilotage va beaucoup m'intéresser. C'est surtout la maitrise de la technologie du drone qui m'intéresse.
Apres, je ne pense pas qu'il faille pousser cette logique à l'extrême.
Il y a quelques temps, j'ai essayé de construire une grosse imprimante 3D, sans rien connaitre à la 3D.
Je me suis planté et ce type d'imprimante est sorti pour un prix bien plus bas que mes dépenses.
Du coup, je me suis lassé.
Quelques nouvelles. En attendant, mon récepteur RX8R-PRO, je me suis remis à mon autre projet, https://www.robot-ma...ou-dhoverboard/
Le récepteur n'arrivera jamais, il s'est perdu en chemin. J'ai demandé son remboursement, et j'en ai commandé un autre chez https://www.flashrc....bus_fr_sky.html
Il devrait arrivé la semaine prochaine et je suis impatient d'au moins faire décoller mon drone, si la météo le permet.
A ce sujet, j'aimerais bien savoir s'il n'y a pas des endroits sécurisés, un peu comme les petits aéroports pour les avions, où je pourrais le faire voler en toute sécurité.
Posté par
sur 19 septembre 2022 - 06:57
dans
Robots roulants, chars à chenilles et autres machines sur roues
je reste curieux de connaître vos avis et remarques sur le sujet =)
Si je devais faire un suiveur de ligne roulant, avec les compétences que toi, Thot et Pat avez, je m'inspirerais de ça, https://www.robot-ma...ylens/?p=115247
Pour 2022, c'est un peu tard, mais pour 2023 . . .




