Bonjour
Comme vous je suis également sur la mise en place d'une station météo, mais perso elle sera sur le faitage de ma maison.
Pour le code je me suis très largement inspiré de:
https://www.sla99.fr...capteurs-meteo/
Bonne continuation
Il y a 244 élément(s) pour Gyro49 (recherche limitée depuis 21-mai 13)
 Posté par
sur 21 août 2023 - 10:49
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 21 août 2023 - 10:49
dans
Conseils et aide aux débutants, livres et kits en robotique
Bonjour
Comme vous je suis également sur la mise en place d'une station météo, mais perso elle sera sur le faitage de ma maison.
Pour le code je me suis très largement inspiré de:
https://www.sla99.fr...capteurs-meteo/
Bonne continuation
Posté par
sur 30 avril 2022 - 11:12
dans
Domotique
Bonjour
Si tu cherches un petit volume peux utiliser des boites en plastique de chez Harib... J'avais utilisé cette solution pour mon projet.
Sinon tu as aussi les soucoupe en plastique de dessous les pots de fleur.
Mais il sinon c'est le détournement de produit qui fait le mieux
Posté par
sur 02 septembre 2019 - 04:50
dans
Domotique
Merci Melmet pour ton message et désolé pour l'attente.
En mettant au propre mes codes et mes schémas j'ai trouvé la solution.
Je me débattais avec une version Arduino 1.0.6 ce qui fait qu'après une mise à jour à 1.8.9 le code et viable.
Dans mon cas, depuis la mise à jour il faut choisir "Arduino Duemilanove or Diecimila" à la place de la nano sous peine de plantage.
encore merci pour l'écoute.
Remettre à plat les choses permet de trouver la solution.
Posté par
sur 26 août 2019 - 05:08
dans
Domotique
Bonjour
Je suis sur plusieurs projets (trop certainement) en même temps.
Il y en a deux sur le même thème : la domotique.
-des sondes pour des cuves d'eau de pluie
-une station météo (girouette, anémomètre et pluviomètre)
Il y a une tonne de référence sur le web mais rien qui ne marche dans mon cas.
Pour la cuve j'ai bien tenté:
http://domotique.web2diz.net/capteur-niveau-cuve-sans-fil-pour-5e/
https://github.com/S...l_low_power.ino
mais je n'ai que des messages d'erreur sur la non possibilité de compiler le fichier ino
Pour la station, j'ai les modules suivants:
https://www.lextroni...meteo-2640.html
ils saont simplement à contact magnétique donc avec des attachinterrupt ça marche
De manière générale j'ai regardé également
https://arduino.stac...om-arduino-nano
http://domotique.web2diz.net/teleinfo-edf-arduino-sans-fil-avec-rfxcom/
http://www.connectingstuff.net/blog/encodage-protocoles-oregon-scientific-sur-arduino/
https://wikifab.org/...Cablage_Arduino
Donc la je craque mais vraiment le gros bug cérébral.
Sinon je suis sur atmega 328p avec quartz 16mHz (simulation d'un UNO)
Par avance merci
Posté par
sur 23 mai 2019 - 09:53
dans
Robots domestiques, robots d'entretien
Bon c'est vraiment un scoop alors personne ne me prend l'idée avant environ deux semaines... sinon je boude.
A la recherche du gabarit
Reste la partie électronique

Donc il me reste à régler mon problème de drivers L298N qui surchauffe
Je retour sur le fer à souder
Posté par
sur 22 mai 2019 - 06:57
dans
Robots domestiques, robots d'entretien
Bonjour
Je suis justement sur projet de robot tondeuse.
J'ai bloqué pendant deux semaines sur les contrôleurs moteurs mais j'ai la solution.
Châssis terminé, les enfants à l'école... dernière soudure aujourd'hui j'espère.
La version 1 ne sera pas autonome.
Posté par
sur 15 mai 2019 - 09:27
dans
Electronique
CA MARCHE
il faut vraiment y croire
Donc même schéma, mêmes résistances, mêmes ... tous sauf le code arduino
// moteur droit
int MD_Q1 = 11; //Q5 qui commande Q1
int MD_Q4 = 10;
// moteur gauche
int MG_Q2 = 6; //Q6 qui commande Q2
int MG_Q3 = 5;
void setup() {
Serial.begin(9600);
pinMode(MD_Q1, OUTPUT);
pinMode(MD_Q4, OUTPUT);
pinMode(MG_Q2, OUTPUT);
pinMode(MG_Q3, OUTPUT);
Serial.println("Ca va commencer");
Serial.println();
}
void loop()
{
Serial.println("Moteur PIN 6");
analogWrite(MD_Q1, 100);
analogWrite(MD_Q4, 100);
analogWrite(MG_Q2, LOW);
analogWrite(MG_Q3, LOW);
delay(5000);
analogWrite(MD_Q1, LOW);
analogWrite(MD_Q4, LOW);
analogWrite(MG_Q2, LOW);
analogWrite(MG_Q3, LOW);
Serial.println("Moteur PIN 11");
analogWrite(MD_Q1, LOW);
analogWrite(MD_Q4, LOW);
analogWrite(MG_Q2, 250);
analogWrite(MG_Q3, 250);
delay(5000);
analogWrite(MD_Q1, LOW);
analogWrite(MD_Q4, LOW);
analogWrite(MG_Q2, LOW);
analogWrite(MG_Q3, LOW);
}
Posté par
sur 15 mai 2019 - 08:32
dans
Electronique
juste une batterie 12V + un moteur 12v + un TIP122 (sans radiateur) commandé par un Nano via une résistance 2,2k.
Avec un cycle de 5 secondes de fonctionnement et 5 secondes repos, le TIP122 est bouillant, Vbe=1,15V et Vce=7,80v.
Forcément le moteur ne va que dans un sens.
un deuxième test, le même moteur 12V coincé entre deux TIP122 le premier est bouillant avec une Vce à8,74V et le deuxième est juste tiède avec une Vce à 0,8V.
dernière modification, je suis proche du résultat.
cette fois le moteur est coincé entre un TIP127 et un TIP122 ayant chacun sa commande depuis le Nano, le moteur à9,6V à ses bornes et les deux TIP sont légèrement tiède.
Conclusion, un TIP122 ne supporte pas d'être placé avant la charge à commander
Je retourne vers le pont en H global
Posté par
sur 14 mai 2019 - 10:46
dans
Electronique
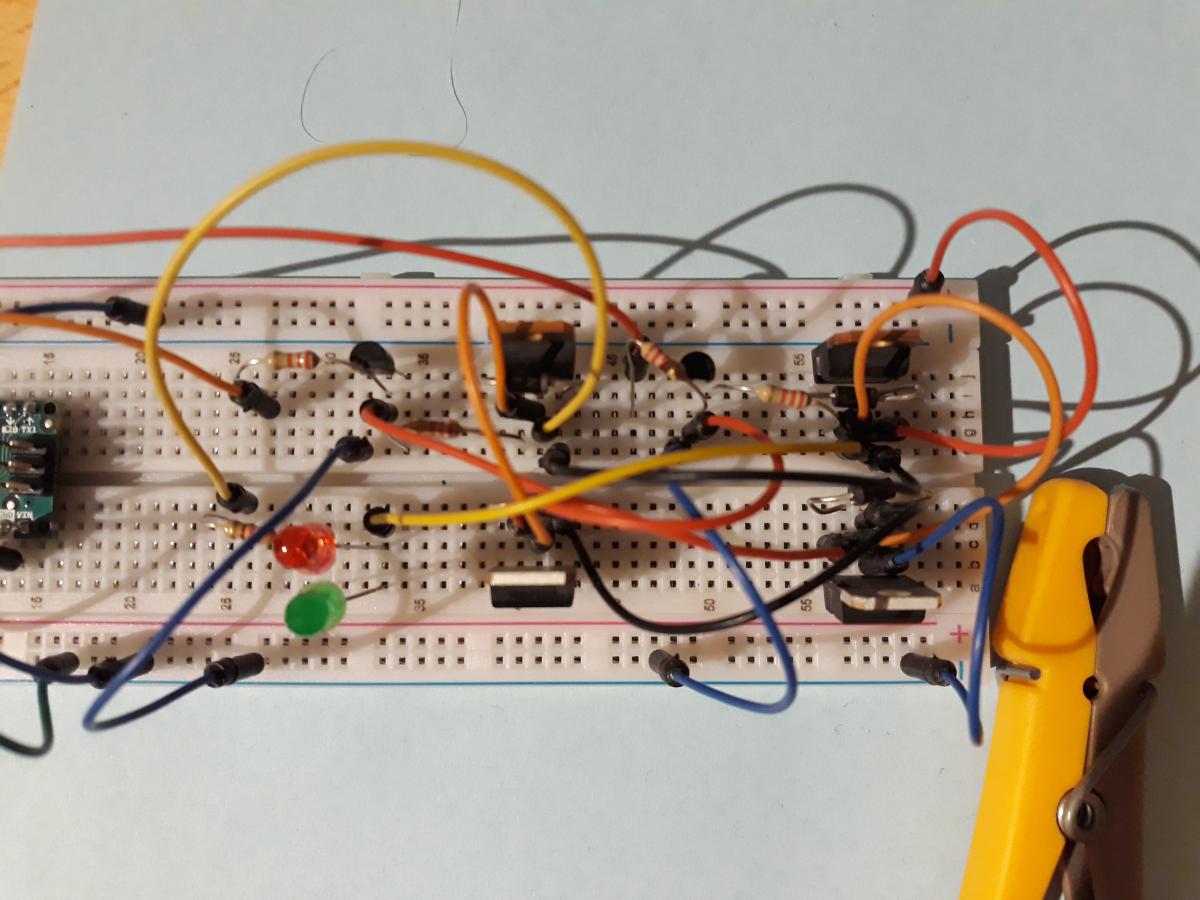
J'ai repris mon schéma du 9 mai (voir plus haut) avec les quatre entrées.
J'ai relié Q3 et Q4 sur le Nano sur les PIN 10 et 5 via des résistance de 470 ohms et c'est pire il ne reste plus que 1,25v au groupe led + résistance
je vais devoir attendre avant de faire de nouveaux essais voir même ne faire que des TIP122
// moteur droit
int MD_Q1 = 11; //Q5 qui commande Q1
int MD_Q4 = 10;
// moteur gauche
int MG_Q2 = 6; //Q6 qui commande Q2
int MG_Q3 = 5;
void setup() {
Serial.begin(9600);
pinMode(MD_Q1, OUTPUT);
pinMode(MD_Q4, OUTPUT);
pinMode(MG_Q2, OUTPUT);
pinMode(MG_Q3, OUTPUT);
Serial.println("Ca va commencer");
Serial.println();
}
void loop()
{
Serial.println("Moteur PIN 6");
analogWrite(MD_Q1, 250);
analogWrite(MD_Q4, HIGH);
analogWrite(MG_Q2, LOW);
analogWrite(MG_Q3, LOW);
delay(5000);
Serial.println("Moteur PIN 11");
analogWrite(MD_Q1, LOW);
analogWrite(MD_Q4, LOW);
analogWrite(MG_Q2, 250);
analogWrite(MG_Q3, HIGH);
delay(5000);
}
Posté par
sur 13 mai 2019 - 09:49
dans
Electronique
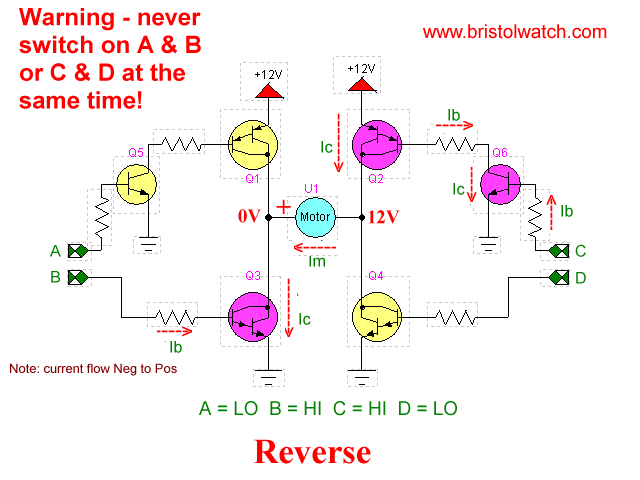
Bon je reviens avec des chiffres, le bon schéma et le code ARDUINO
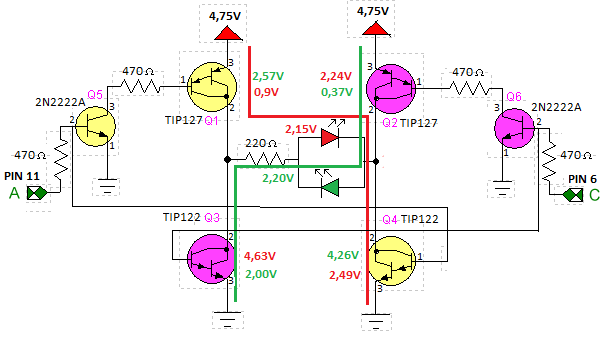
La couleur des tensions correspond à la led (rouge PIN11 et verte PIN6)
Sinon les 2,15V et 2,20V du centre sont aux bornes du groupe led + résistance 220 Ohms.
// moteur droit
int MD = 11;
// moteur gauche
int MG = 6;
void setup() {
Serial.begin(9600);
pinMode(MD, OUTPUT);
pinMode(MG, OUTPUT);
Serial.println("Ca va commencer");
Serial.println();
}
void loop()
{
delay(5000);
Serial.println("Moteur PIN 6");
analogWrite(MG, 250);
analogWrite(MD, LOW);
delay(5000);
Serial.println("Moteur PIN 11");
analogWrite(MD, 250);
analogWrite(MG, LOW);
}
Posté par
sur 10 mai 2019 - 07:48
dans
Electronique
désolé pour hier soir mais j'avais besoin de dormir un peu, donc
-pour Ashira je vais vérifier la tension ce week end, en ce qui concerne la commande, je fais les deux soit un digitalWriter(11, HIGH) soit un diitalwriter(11, 250) le résultat est le même
-pour Forthman
pour éviter les erreurs de commandes j'ai relié au pin11 la commande de Q1 et Q4 et au pin 6 la commande de Q2 et Q3.
Je vais rentrer en réunion, alors dès que j'ai un instant je joindrais le schéma du montage.
Merci pour votre aide
Posté par
sur 10 mai 2019 - 07:35
dans
Et si vous vous présentiez?
bonjour et bienvenue
Posté par
sur 09 mai 2019 - 10:11
dans
Electronique
Aux bornes du tout (led + résistance 220Ohms)
Posté par
sur 09 mai 2019 - 09:53
dans
Electronique
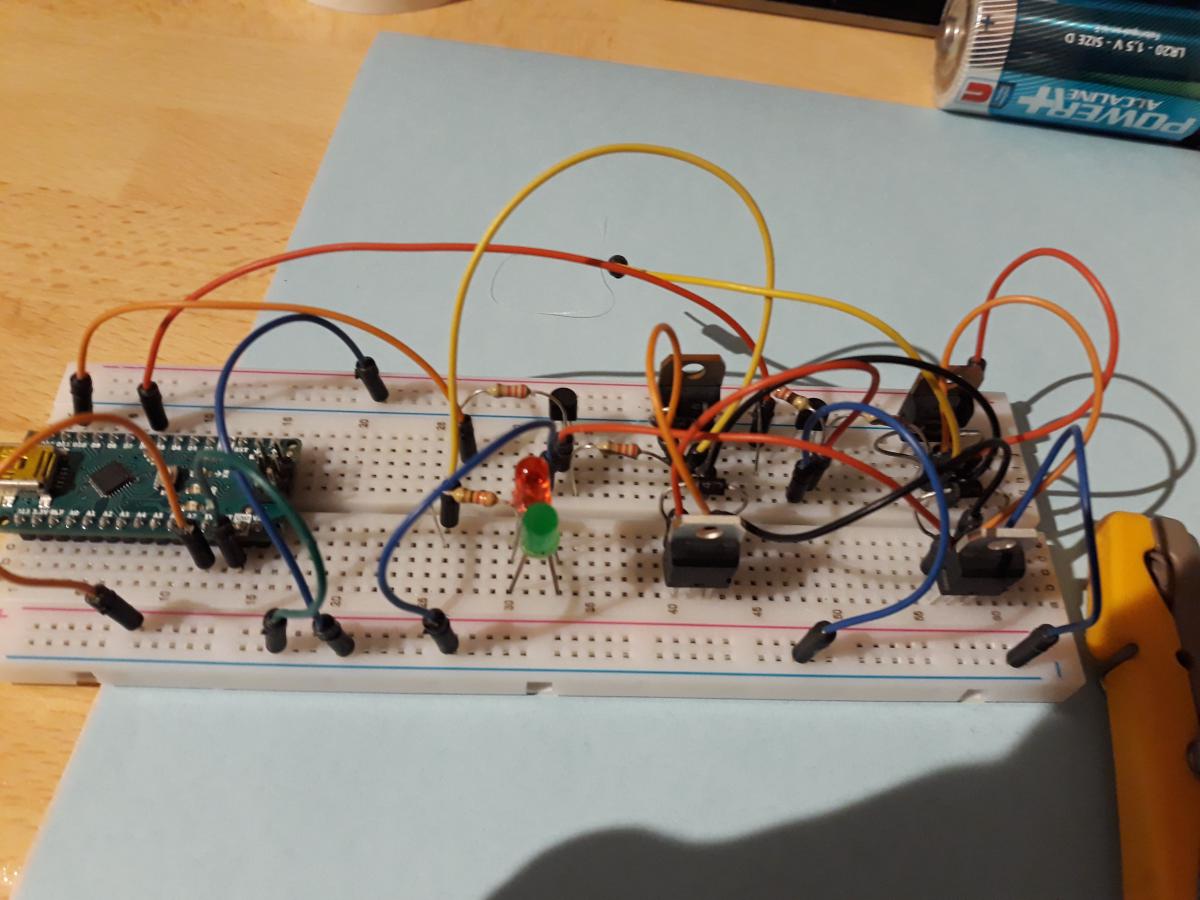
Bonjour
Je suis toujours sur ma commande de moteur.
Je viens de faire un pont H à base de TIP127 et TIP122 deux leds en parallèle et opposition ça marche. Elles s'allument à chaque changement de sens de la tension. C'est génial.
pour les résistance j'ai que des 2.2k
Je mets de la puissance avec du 12v, la masse en commun avec l'Arduino Nano et un moteur 12v .... ça marche pas.
Donc au multimètre sans le moteur il y a bien les 12v à l'emplacement du moteur dès que je mets le moteur dans le circuit ça s’écroule à 0V.
Après une vérification avec les leds, elles n'ont que du 2.2V alors que je balance du 5V
Je suis ouvert d'esprit mais là je bloque.
Petite précision je fais ça sur une plaque d'essai 830 points et des fils comme des cheveux...
Posté par
sur 29 avril 2019 - 09:54
dans
Electronique
C'est exactement mon module.
Je n'ai pas remis le ventilateur après le câblage des diodes.
Sinon pendant les ponts je vais essayer avec des TIP122 et Tip127 de faire mon propre pont en H.
Posté par
sur 29 avril 2019 - 09:06
dans
Electronique
Bonjour
je suis sur la bonne voie.
Après lecture de plusieurs messages et tutos, j'ai doublé le module L298n par des diode 1N4004.
Il met plus de temps à chauffer.
Est ce qu'il existe des diodes plus rapide ou plus... je sais pas quoi ?
Posté par
sur 24 avril 2019 - 10:56
dans
Autres projets inclassables
Bonsoir
je suis sur la même idée que Path sur un contact via l'eau
J'ai des cuves d'eau de pluie et un de mes projets est de mesurer la hauteur du niveau par contact style clavier.
http://domotique.web2diz.net/capteur-niveau-cuve-sans-fil-pour-5e/
donc si ça marche pour cinq fils... pour un contact c'est bon
il y a aussi
http://bateaux.trucs.free.fr/detecteur_eau.html
il suffit d'endormir l'arduino et de le réveiller toutes les heures pour un contrôle.
Je dois tenter l'affaire rapidement
Posté par
sur 16 avril 2019 - 11:02
dans
Electronique
bonsoir
non un moteur de chaque coté du contrôleur avec un pwm à 180
int speed = 180;
analogWrite(MD, speed );
analogWrite(MG, speed );
Posté par
sur 16 avril 2019 - 06:22
dans
Autres projets inclassables
Bonjour
La présence d'eau c'est quoi au juste
humidité ->https://projetsdiy.f...objet-connecte/
pluie -> https://www.kzenjoy....-pluie-arduino/
humidité dans le sol ->https://arduino103.b...-du-jardin.html
pour les 500m il faut tenter le 433mhz.
Posté par
sur 16 avril 2019 - 06:12
dans
Electronique
Les news, j'ai donc pris l'intensité en charge, à la sortie de la batterie (Arduino+ moteur+contrôleur de moteur) j'ai une consommation de 3,49A. Finalement c'est dans les normes.
Je remplace mon contrôleur par un autre module et là même problème.
Finalement je trouve un ventilo de PC pour forcer le refroidissement c'est un peu mieux, mais ça chauffe et sa bloque.
Posté par
sur 15 avril 2019 - 10:34
dans
Electronique
Bon ben je reviens sur le sujet, avec une possibilité, l'intensité des moteurs serait supérieure au 2A max du L298.
Une première mesure de la résistance d'un moteurs est de 8,9 ohms.
Une intensité de 1,5 A à vide.
demain je fais une mesure en charge.
J'ai l'impression que je vais être obligé de faire mon propre pont-H.
Posté par
sur 14 avril 2019 - 03:11
dans
Electronique
Bonjour
Je suis en plein projet et voila que je bloque sur mon contrôleur de moteur.
Je m'explique, j'ai :
- deux moteurs identique à RobArchi avant modification soit 12v 9000 trmin
- un Arduino nano
- un contrôleur l298n également identique à RobArchi
- batterie 12V 12Ah.( en fait elle est chargée à 12,5V
Après trente seconde de mouvement, les moteurs sont en faiblesse comme s'ils manquaient de tension.
j'ai pensé qu'un condensateur aux bornes de chaque moteur serait la solution pais non.
Je me suis cramé le doigt sur le radiateur du L298.
Auriez vous une idée
Par avance merci
Posté par
sur 13 septembre 2018 - 09:32
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je suis de retour car j'ai un petit problème, les deux moteurs 300 w 24v n'arrivent pas à me faire bouger et ont même du mal avec mon fils de 45kg tout mouillé.
je voudrais passer sur un 1000w. C'est là que vous intervenez, est ce que c'est mieux un moteur de 1000w 36v ou deux de 500w 24v
En ce qui concerne les batteries j'ai actuellement 4 x12v
merci pour vos conseils
Posté par
sur 11 août 2018 - 02:09
dans
Robots roulants, chars à chenilles et autres machines sur roues
Ben c'est terminé, je recherche donc un béta testeur 
L'engin fait 32 kg et il faut sauter à 28 centimètres avec un écart entre les pieds de 40 cm
Je rigole je vais attendre que mon fils rentre de vacances, personnellement je ne suis plus certain de vouloir l'essayer.
Je vais commencer autre chose
A +
Posté par
sur 03 juillet 2018 - 06:21
dans
Robots roulants, chars à chenilles et autres machines sur roues
C'est encore moi
Pour les liens j'ai fait plusieurs site
les pneus -> amazon -> 4 x Pneu KENDA K290 145/70–6 2pr 18 F TL pour quad/ATV/poussette -> 105,90
jante -> lebonquad.com ->4 jantes 6 pouces -> 4x15euros= 60
moteurs -> amazon -> 2 de hmparts Moteur électrique - 24V 300W - 2650rpm - MY1016 - E SCOOTER/RC= 2x49,99 = 99,98
controleur -> roboshop ->Contrôleur de Moteur Regénératif SyRen 50A 6V-30V -> 2x114 = 128
sinon pour le reste
a+




