Contenu de Jekert
Il y a 193 élément(s) pour Jekert (recherche limitée depuis 05-mai 13)
Par type de contenu
Voir pour ce membre
#96030 Glenn Robot Humanoide
 Posté par
sur 02 juin 2018 - 07:06
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 02 juin 2018 - 07:06
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Et ça pour tes capteurs : ? http://s.aliexpress.com/7bu2uYZV
#103890 Glenn Robot Humanoide
Posté par
sur 15 juin 2019 - 12:10
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
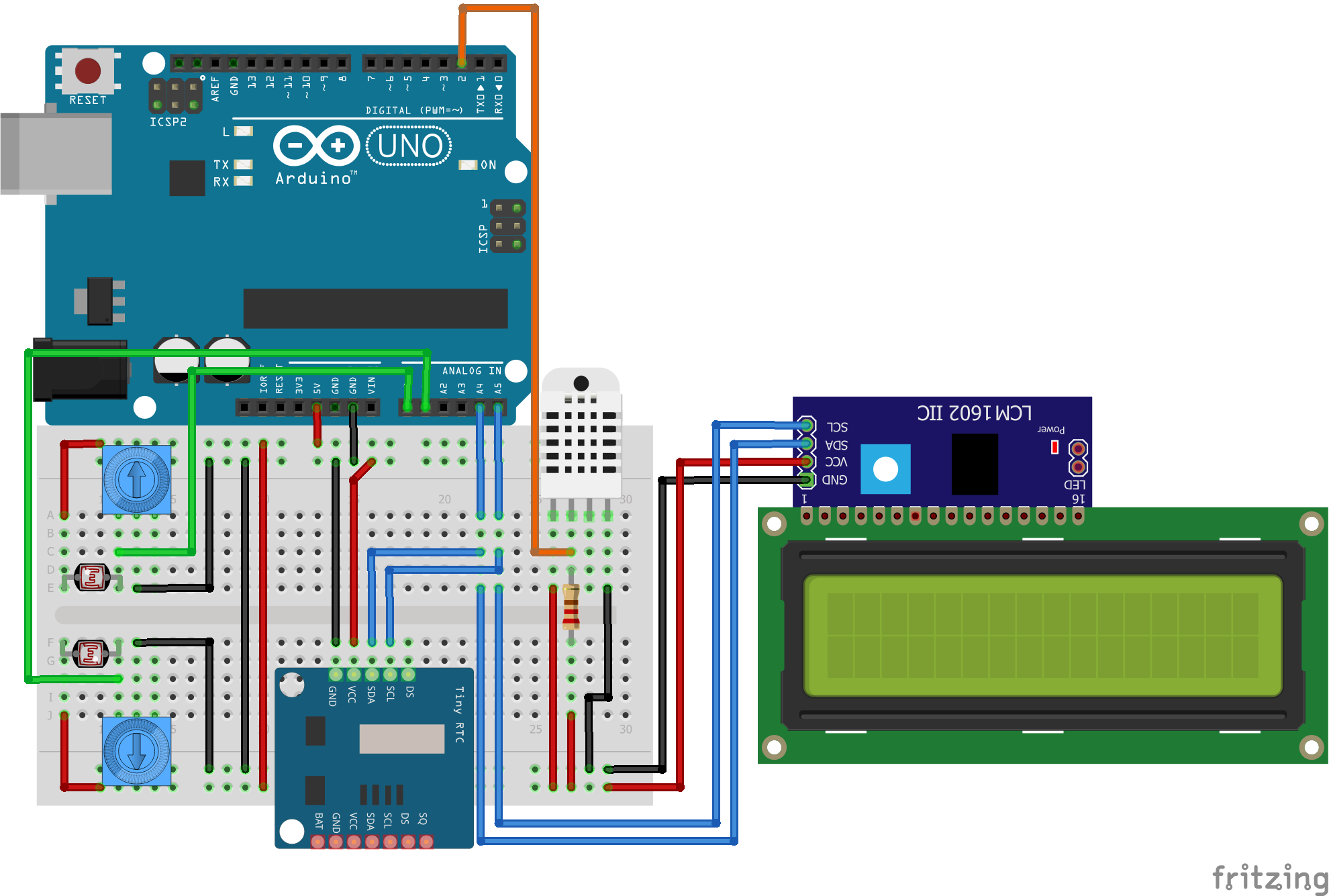
Tu m'as perdu, j'ai du mal à comprendre ton problème. Tu as donc deux capteurs utilisant l'I2C, si c'est 2 esclaves tu ne devrais avoir aucun problèmes pour les connecter les deux en parallèle à ton esp en maitre si ils ont la même tension d'alimentation. Je l'avais déjà fait sans problèmes pour ma station météo où tout est en 5V (l'écran et le module RTC sont tout les 2 branchés sur les pins I2C de l'arduino) je sais pas si c'est différent pour esp:
J'ai pas bien compris plusieurs trucs dans tes derniers messages :
- Pourquoi vouloir les mettre en série ? Et comment ?
- Pourquoi tu veux changer une adresse I2C dans une bibliothèque ? Quelle bibliothèque ?
- Pourquoi tu veux 2 adresses I2C ?
- Et plus généralement, qu'es-ce que tu as réussi à faire et que tu n'as pas réussi ? Es-ce que tu as déjà réussi à communiquer en I2C avec l'IMU seul ?
#79370 Et si on faisait une imprimante 3D ?
Posté par
sur 18 février 2017 - 11:03
dans
Impression 3D et Imprimantes 3D
Salut,
Je sais pas si vous en êtes déjà à ces détails, mais ça pourrais être utile de pouvoir retirer "facilement" tout le bloc de la tête d'impression pour pouvoir le remplacer par d'autres outils (laser, cnc, ...) pour de futurs améliorations si déjà vous avez une telle surface.
#85346 Et si on faisait une imprimante 3D ?
Posté par
sur 02 juillet 2017 - 01:57
dans
Impression 3D et Imprimantes 3D
Dans le même genre que celle de Mike: https://www.kickstar...belt-3d-printer
#82058 Rocbot
Posté par
sur 12 avril 2017 - 11:31
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut,
Tu utilises un module HC05 ou tu es passé au HC12 ?
#82065 Rocbot
Posté par
sur 12 avril 2017 - 12:23
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'ai déjà écrit une page à propos de l'appareillage de 2 modules HC05 mais je ne l'ai pas encore publiée, donc je te retranscris ici les actions que j'avais fais pour le maitre (il me parait logique que la télécommande soit en mode esclave) :
Première étape essaie de trouver l'adresse avec le téléphone (si il n'apparait pas dans le menu bluetooth, tu peux utiliser l'appli Arduino BlueControl qui affiche les adresses avec les noms).
Téléverse ce programme sur une arduino et connecte le module BT comme décrit dans le programme. Et quand tu remets le tout sous tension reste appuyer sur le bouton du module, une fois relâché il devrait clignoter lentement (période de 2secondes environ)
#include <SoftwareSerial.h>
SoftwareSerial HC05(10, 11); // TXmodule->10, RXmodule (après pont diviseur de tension ou non)-> 11
// Key -> VCC
void setup()
{
//Liaison série :
Serial.begin(9600);
Serial.println("Pret a recevoir vos commandes");
HC05.begin(38400); // Vitesse par défaut en mode AT du module bluetooth
}
void loop()
{
// Communication HC05 -> Moniteur Série
if (HC05.available())
{
Serial.write(HC05.read());
}
// Communication Moniteur Série -> HC05
if(Serial.available())
{
HC05.write(Serial.read());
}
}
Puis ouvre l'interface Série et choisi ce paramètre :
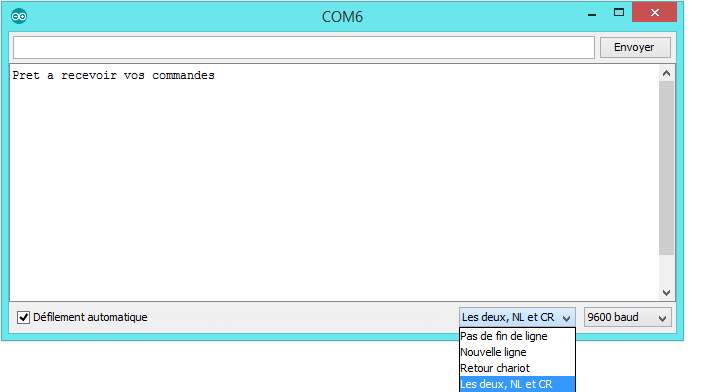
Si quand tu envoie AT dans l'interface Série et qu'il te renvoie OK, c'est que tu peux modifier les paramètres.
Et ensuite j'ai entré les commandes suivantes (sans les commentaires ^^) :
- AT+RMAAD //Pour vider la liste des appareils appairé.
- AT+ROLE=1 //Role = maitre
- AT+NAME=HC05M //Renomme le module (facultatif)
- AT+CMODE=0 //Active connexion auto
- AT+BIND=2016,2,307468 //Adresse à laquelle se connecter (je pense qu'il faut garder le même format)
- AT+UART=38400,0,0 //38400 étant le baudrate choisi (doit être le même que celui de la télécommande)
Et normalement tu devrais pouvoir connecter ton module à la télécommande après l'avoir redémarrer.
Voilà, j'espère que ça pourra t'aider 
#84996 Robot suiveur de personne
Posté par
sur 22 juin 2017 - 07:44
dans
Robots roulants, chars à chenilles et autres machines sur roues
Ton histoire de glacière m'a fait penser à un projet que j'ai vu la semaine dernière: https://www.hackster...e-cooler-7ca8bc
Par contre il utilise le GPS, donc ça ne fonctionne pas en intérieur... mais il y a peut-etre des idées à garder de côté
#84963 Robot suiveur de personne
Posté par
sur 21 juin 2017 - 07:05
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut !
C'est drôle, j'étais dans une situation similaire à la tienne il y a 5 ou 6 ans
Comme l'a dit Path, il faut y aller pas à pas et je répète sa question: Es-ce que tu as déjà utilisé Arduino ? Es-ce que tu as déjà programmé ?
Le concours se termine quand ? Es-ce que le concours est ta seule motivation ?
#97902 Brainstorming projets robotiques originaux
Posté par
sur 26 juillet 2018 - 09:42
dans
Lego
Besoin de beaucoup de matériel mais j'aime bien l'idée :
#72155 Le shop est en ligne mais...
Posté par
sur 12 juillet 2016 - 01:20
dans
Les annonces Robot Maker
J'ai vu récemment l'oscilloscope en kit DSO138, c'est peut être un bon kit pour s'initier à la soudure et à l'électronique mais vu son prix je ne sais pas si il est assez précis pour que ses mesures soient exploitables (peut-être suffisamment précis pour un débutant ?).
Vous en pensez quoi ?
#74567 Guide pour débuter avec Arduino
Posté par
sur 02 octobre 2016 - 11:16
dans
Les annonces Robot Maker
Hello les Makers !
Mike118 vous tease depuis plusieurs jours à propos du premier chapitre de l'ouvrage dédié à Arduino que nous avons écrit avec Jan, et c'est à moi que reviens le plaisir de vous annoncer la publication officielle de celui-ci !


Pour qui ?
Cet ouvrage a été écrit afin de permettre à une personne n'ayant jamais utilisé de cartes programmables de créer ses premiers programmes facilement donc que vous soyez totalement novice, curieux ou que vous souhaitez revoir les bases, ce premier chapitre est fait pour vous 
Comment ?
Le principe que nous essayerons de respecter tout au long de l'ouvrage est d'apprendre par l'essai de programmes commentés et expliqués aux fils des pages ainsi qu'à l'aide d'exemples permettant de mélanger et utiliser ce que nous avons vu au cours du chapitre.
Donc l'ouvrage est disponible dès maintenant ici, parmi ceux déjà publiés par Nulentout.
Nous attendons avec impatience vos premiers retours donc n'hésitez pas à réagir ici ou dans les commentaires des pages de l'ouvrage !
#97205 Let's go !!
Posté par
sur 08 juillet 2018 - 12:36
dans
Et si vous vous présentiez?
Bienvenue !
Bon courage pour le bras, je suis certain que tu trouveras ce dont tu as besoin ici
Bon courage pour le bras, je suis certain que tu trouveras ce dont tu as besoin ici
#94729 Les logiciels pour la conception d'un robot de qualité déjà tester !...
Posté par
sur 22 avril 2018 - 11:01
dans
Logiciels
Pareil que thermo_nono, j'ajouterais juste :
- Cura pour l'impression 3D
- Inkscape pour le dessin vectoriel (utile pour la découpe laser)
- PiBakery pour l'installation d'une RPi (permet de la connecter au wifi dès le premier démarrage)
- Git pour les codes
- Kicad pour le design de PCB (j'ai aussi essayé Eagle et Circuit Maker)
- Algodoo (merci @Oracid) pour les simulations très simples et de temps en temps Scilab/Matlab/Octave
- GeoGebra pour certains schémas
- Dia pour les algorigrammes
Et comme éditeur j'utilise nano sous linux (dans le terminal) ou Atom sous windows
PS: Je vais éditer ce message un de ces jours pour ajouter les liens
#86719 Créer mon premier robot
Posté par
sur 14 août 2017 - 11:21
dans
Autres projets inclassables
Salut, es-ce que tu as déjà vu ce robot : http://www.robot-maker.com/forum/tutorials/article/8-cocotix-mon-premier-robot/ ?
Il coute pas cher et il y a toutes les explications nécessaires pour le construire
#78910 Arduino // Intelligence artificiel
Posté par
sur 06 février 2017 - 06:37
dans
Intelligence artificielle
Salut,
Je me permets de te répondre en attendant que quelqu'un de plus expérimenté vienne donner son avis
En fait, ça dépend de ce que tu entends par intelligence artificielle.
Je me suis intéressé un petit peu intéressé à ce sujet l'année dernière et en particulier à l'utilisation de l'algorithme Q-Learning qui est un algorithme d'apprentissage par renforcement (qui s'améliore par l'erreur et l'essai), j'avais trouvé quelques ressources que j'ai placé dans le sujet (mais je ne suis pas allé jusqu'au bout). Voici ce que j’essayai de faire :
Et quelques exemples supplémentaires :
Et je crois que Bobox utilise une Arduino et un algorithme génétique pour son Crabeel.
Si tu pensais plutôt à quelque chose comme JARVIS dans les MARVEL, certains ont essayé de le reproduire avec des Raspberry ou PC:
- http://jasperproject.github.io/
-
Sinon je pense qu'en général l'Arduino n'est pas utilisée comme cerveau mais plutôt un micro-ordinateur (comme les Raspberry Pis) ou un PC/Serveur connecté à une Arduino qui gère la partie capteur + moteurs.
Si tu souhaite en savoir plus sur la programmation de différentes intelligences artificielles, je te recommande la chaine de Siraj Raval ou encore cette playlist de vidéos.
#96002 salutation Ho maker's community
Posté par
sur 01 juin 2018 - 09:25
dans
Et si vous vous présentiez?
Bienvenue !
#84604 Matrice à LED - A la benne.
Posté par
sur 10 juin 2017 - 06:08
dans
Electronique
Panneau d'affichage pour le score du combat des makers !
#85929 Bonjour le monde, je suis martin
Posté par
sur 17 juillet 2017 - 10:23
dans
Et si vous vous présentiez?
Bienvenue !
#95578 Hello !
Posté par
sur 20 mai 2018 - 04:24
dans
Et si vous vous présentiez?
Bienvenue !
#113296 Alimenter 100 LEDs avec un Arduino Uno.
Posté par
sur 13 avril 2021 - 01:02
dans
Electronique
Bonjour,
Ce type de projet est courant, tu n'as pas dû utiliser les bons mots-clés, tu peux voir ce genre de projet qui utilise des bandes de LEDs :
Il existe par exemple les bandes de leds adressables (que tu peux donc contrôler individuellement) et RGB mais tu peux aussi les acheter sous forme de cercle, de matrice ou à l'unité pour les placer comme tu veux. Généralement on voit les leds Neopixel WS2812B si ça peut t'aider dans tes recherches. Je ne sais pas si tu cherchais des RGB mais c'est possible qu'elles soient moins chères que de trouver une alternative unicolore.
Ton Arduino Uno pourra contrôler individuellement les leds grâce à un fil qui parcourt l'ensemble de tes leds mais elle n'a pas suffisamment de puissance pour alimenter toutes les leds (ces leds consomment jusqu'à 50mA donc fois 100 tu te retrouves à 5A pour 5V) donc il te faut soit une alimentation secteur 5V 5A soit une batterie avec un convertisseur 5V en fonction de tes besoins.
#113301 Alimenter 100 LEDs avec un Arduino Uno.
Posté par
sur 13 avril 2021 - 10:04
dans
Electronique
Tu en trouveras plein sur internet, par exemple : https://howtomechatr...-using-arduino/
#113152 Condensateur aux bornes d'un moteur courant continu
Posté par
sur 14 mars 2021 - 11:26
dans
Electronique
Salut,
Depuis que tu as publié ce sujet, cette question me trotte dans la tête... Je suis persuadé qu'il y a une solution plus "simple" qui utilise l'électronique ou la mécanique.
Mon idée est d'utiliser un principe similaire à une flywheel, ton moteur démarre normalement à vitesse constante, mais entre ta roue (qui a une masse élevée) et ton moteur, tu peux mettre une sorte transmission par friction (ou sortes d'aimants pour ne pas avoir d'usures). De cette manière, au démarrage l'inertie de ta roue sera trop importante pour qu'elle tourne à pleine vitesse mais au fur et à mesure que le moteur continue de tourner il va fournir de l'énergie à la roue et l'accélérer jusqu'à ce qu'ils aient la même vitesse. Dès que ton moteur s'arrête, la roue continue de tourner à cause de son inertie mais la friction la ralenti progressivement. Cette méthode devrait aussi éviter de consommer trop de courant au démarrage puisque le moteur tournera dans le vide une fois la force de friction dépassée.
Je ne sais pas du tout c'est réalisable ou fonctionnel mais peut-être que ça pourra aider à trouver des solutions alternatives ^^
Depuis que tu as publié ce sujet, cette question me trotte dans la tête... Je suis persuadé qu'il y a une solution plus "simple" qui utilise l'électronique ou la mécanique.
Mon idée est d'utiliser un principe similaire à une flywheel, ton moteur démarre normalement à vitesse constante, mais entre ta roue (qui a une masse élevée) et ton moteur, tu peux mettre une sorte transmission par friction (ou sortes d'aimants pour ne pas avoir d'usures). De cette manière, au démarrage l'inertie de ta roue sera trop importante pour qu'elle tourne à pleine vitesse mais au fur et à mesure que le moteur continue de tourner il va fournir de l'énergie à la roue et l'accélérer jusqu'à ce qu'ils aient la même vitesse. Dès que ton moteur s'arrête, la roue continue de tourner à cause de son inertie mais la friction la ralenti progressivement. Cette méthode devrait aussi éviter de consommer trop de courant au démarrage puisque le moteur tournera dans le vide une fois la force de friction dépassée.
Je ne sais pas du tout c'est réalisable ou fonctionnel mais peut-être que ça pourra aider à trouver des solutions alternatives ^^
#76535 Ma présentation
Posté par
sur 22 novembre 2016 - 08:05
dans
Et si vous vous présentiez?
Bienvenue Salvatore
#78731 "Recyclage"
Posté par
sur 01 février 2017 - 01:34
dans
Recyclage
Salut,
Pour la wii: les manettes et la board devraient se connecter facilement à une RPi ou un PC, la nunchuk est en i2C donc tu peut l'utiliser avec Arduino et RPi je pense et tu peut utiliser la caméra sur les manettes comme l'a fait Leon ( http://heli.bot.free.fr/capteurs.html ) et la barre comme balise infrarouge, pour le reste de la console, peut être que les pas à pas du lecteur CD peuvent être récupéré (ça peut être utile pour ceci ou ceci par exemple ou encore pour la diode)
#67994 Présentation
Posté par
sur 16 mars 2016 - 10:27
dans
Et si vous vous présentiez?
Hello 
Après cette "blague" ridicule voici ma petite présentation originale (ha bah non en fait)
Mon pseudo est Jekert je suis en première filière Sciences de l'Ingénieure. Je m'intéresse beaucoup aux nouvelles technologies, j'ai découvert Arduino il y a peu de temps, et j'ai commencer à zyeuter l'impression 3D, etc...
Je vous avez prévenus que ça allait être original 
Voilà voilà.




