Dans le programme, je ne sais pas pourquoi vous utilisez la valeur 666. Les personnes superstitieuses pensent que c'est un mauvais chiffre. Et c'est en le voyant que je me suis dit que ce programme était peut-être une blague, alors je n'ai pas cherché à répondre.
Sinon, en regardant rapidement, je vois qu'il manque :
#include <Servo.h>
Il y aurait eu un message à la compilation à ce sujet, je pense.
Lancer la compilation permet de détecter beaucoup d'erreurs sans prendre aucun risque. Donc, vous auriez pu le faire.
Je ne vois rien dans le programme qui pourrait faire "tout casser lol".
Quand on n'est pas sûr de soi, le mieux est de procéder petit à petit.
Par exemple, au départ, on fait un programme assez petit. On le teste. Puis on rajoute quelques lignes. On reteste. Etc.
Ou bien on peut avoir un programme assez long au début dans lequel on met des zones en commentaires pour tester petit à petit.
Jusqu'à présent, je n'ai jamais vu de servomoteur qui aurait "cassé" suite à un programme mal écrit. Quand le servomoteur reçoit l'ordre de bouger, soit la valeur est dans ses limites et il bouge, soit la valeur est hors des limites, et il ne fait rien.
Par contre, j'ai grillé un servo en me trompant dans les branchements. Un des fils a reçu trop de voltage. Donc, il faut bien vérifier son montage.
Contenu de olivthill
Il y a 137 élément(s) pour olivthill (recherche limitée depuis 16-juillet 14)
Par type de contenu
Voir pour ce membre
#59541 Valeur neutre microservo
 Posté par
sur 25 janvier 2014 - 11:24
dans
Programmation
Posté par
sur 25 janvier 2014 - 11:24
dans
Programmation
#59544 Valeur neutre microservo
Posté par
sur 26 janvier 2014 - 01:02
dans
Programmation
C'est 90, comme il est indiqué dans la documentation http://arduino.cc/en/Reference/ServoWrite :
0 désigne l'un des points les plus extrêmes (à gauche ou à droite selon les modèles de servos), et 180 désigne l'autre point extrême.
myservo.write(90); // set servo to mid-point
0 désigne l'un des points les plus extrêmes (à gauche ou à droite selon les modèles de servos), et 180 désigne l'autre point extrême.
#58072 Utilisation regulateur PID
Posté par
sur 10 octobre 2013 - 12:23
dans
Programmation
Merci dav2mars pour avoir attiré l'attention sur ce type de régulateur.
Merci Black Templar pour les liens, surtout le deuxième, http://www.ferdinandpiette.com/blog/2012/04/asservissement-en-vitesse-dun-moteur-avec-arduino/ , qui montre un schéma et un programme pour arduino de cette régulation pour un moteur.
J'aime bien aussi la page de Wikipedia en anglais sur le sujet, notamment l'introduction :
The proportional, the integral and derivative values, denoted P, I, and D can be interpreted in terms of time:
Mais je me méfie un peu des formules qui considèrent la dérivée première.
Pourquoi ne pas prendre en compte la dérivée seconde aussi pendant qu'on y est ?
Quelle fréquence de lecture du capteur prendre ? Cela a une influence sur la dérivée.
En tous cas, c'est un sujet intéressant.
Merci Black Templar pour les liens, surtout le deuxième, http://www.ferdinandpiette.com/blog/2012/04/asservissement-en-vitesse-dun-moteur-avec-arduino/ , qui montre un schéma et un programme pour arduino de cette régulation pour un moteur.
J'aime bien aussi la page de Wikipedia en anglais sur le sujet, notamment l'introduction :
The proportional, the integral and derivative values, denoted P, I, and D can be interpreted in terms of time:
- P depends on the present error,
- I on the accumulation of past errors,
- D is a prediction of future errors, based on current rate of change.
Mais je me méfie un peu des formules qui considèrent la dérivée première.
Pourquoi ne pas prendre en compte la dérivée seconde aussi pendant qu'on y est ?
Quelle fréquence de lecture du capteur prendre ? Cela a une influence sur la dérivée.
En tous cas, c'est un sujet intéressant.
#56701 Un nouveau site de partage de projets electronique
Posté par
sur 20 juin 2013 - 10:53
dans
Projets logiciels, web, ou simulations
J'aime bien.
La présentation est claire et compacte. On voit rapidement les sujets grâce aux photos et aux résumés.
Bravo !
La présentation est claire et compacte. On voit rapidement les sujets grâce aux photos et aux résumés.
Bravo !
#92333 Un banc de test de couple moteur/servo
Posté par
sur 07 février 2018 - 07:33
dans
Bancs de tests et autres machines d'expérimentations
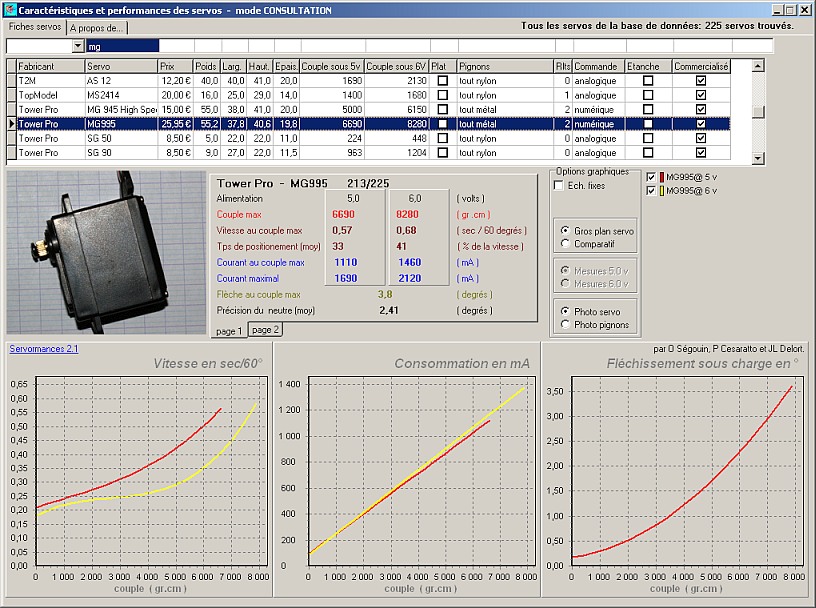
Juste pour infos, des aéromodélistes, Patrick Cesarato, Jean-Luc Delort et Olivier Segouin, ont créé deux bancs de test qui ont permis de mesurer les caractéristiques de plus d'une centaine de servomoteurs répertoriés dans la base de données Servomances .
Cf. http://www.teaser.fr/~osegouin/aeromode/servos.phtml et http://www.aeroglide.net/2013/02/servormances-mise-a-jour-fevrier-2013/
Edit : Par exemple, pour le MG995, ils ont créé la fiche suivante, où ils indiquent avoir trouvé un couple max de 6.690 à 5V et 8.280 à 6V.
#56133 Télécommande 2,4GHZ et arduino ?
Posté par
sur 15 mai 2013 - 12:17
dans
Electronique
Le principe pour une liaison 2.4GHz, est de connecter le module de réception de la liaison 2.4GHz sur les broches Tx et Rx de la Arduino (et aussi le + et la masse). Cela permet d'utiliser les fonctions Serial.read(), etc. Un petit inconvénient est que la liaison USB utilise aussi Tx et Rx, donc on ne peut pas développer et tester en même temps. Si on veut choisir d'autres broches que Tx et Rx, il y a d'autres solutions avec autre chose que Serial, mais qui sont un peu plus compliquées.
Personnellement, je n'ai pas utilisé une liaison 2.4GHz (j'ai utilisé une liaison bluetooth qui est assez proche), donc je ne connais pas tous les détails.
Pour le L298N et le contrôle des moteurs, c'est une autre question qui mériterait un autre fil de discussion.
Edit : Je vois qu'il existe plusieurs modèles de recepteurs 2.4GHz, et que ca peut changer la manière dont on fait les connexions et dont on lit les signaux dans le programme. Donc, ce que j'ai dit ci-dessus concerne l'un des cas possibles, mais peut-être pas celui de votre recpeteur.
Re-Edit : En fait, il semble que la plupart des recepteurs ne fonctionnent pas comme des liaisons série (comme je le croyais), mais en envoyant directement des signaux PWM. Voir par exemple, http://forum.arduino.cc/index.php?PHPSESSID=q4rh2ngjphtrevo13ror6ptt81&topic=166409.0 . Faire une recherche dans Google avec les mots clés : radio 2.4GHz Arduino.
Personnellement, je n'ai pas utilisé une liaison 2.4GHz (j'ai utilisé une liaison bluetooth qui est assez proche), donc je ne connais pas tous les détails.
Pour le L298N et le contrôle des moteurs, c'est une autre question qui mériterait un autre fil de discussion.
Edit : Je vois qu'il existe plusieurs modèles de recepteurs 2.4GHz, et que ca peut changer la manière dont on fait les connexions et dont on lit les signaux dans le programme. Donc, ce que j'ai dit ci-dessus concerne l'un des cas possibles, mais peut-être pas celui de votre recpeteur.
Re-Edit : En fait, il semble que la plupart des recepteurs ne fonctionnent pas comme des liaisons série (comme je le croyais), mais en envoyant directement des signaux PWM. Voir par exemple, http://forum.arduino.cc/index.php?PHPSESSID=q4rh2ngjphtrevo13ror6ptt81&topic=166409.0 . Faire une recherche dans Google avec les mots clés : radio 2.4GHz Arduino.
#56685 Tebby one
Posté par
sur 19 juin 2013 - 03:16
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour,
Je ne vais pour vous jeter la pierre à mon tour, puisque j'essaye de faire un peu la même chose.
C'est un bon projet, mais c'est difficile pour un amateur.
Voici quelques petites pistes.
Beaucoup de robots de ce genre sont construits à partir de servomoteurs, mais pas tous.
Un problème avec les servos, c'est qu'ils ont une rotation maximale qui est généralement de 170 degrés, parfois plus, et parfois moins.
Or, cette limitation empêche des mouvements amusants comme le grand écart, ou des tours avec les bras.
Il faudra choisir la bonne puissance.
Ce n'est pas facile, parce que les spécifications des constructeurs sont évidemment un peu gonflées.
Il est difficile de s'y fier. Les torques indiqués donnent un ordre de grandeur.
Mais il faut tester en situation réelle pour se rendre compte si un moteur est trop faible ou pas.
Les servos peuvent être de type "analogique" ou "digitaux".
Les "digitaux" ont un temps de réponse plus rapide et sont plus précis.
Mais ils font du bruit dès que le servo fait un peu d'effort, et ça devient vite très énervant.
Par ailleurs, le temps de réponse et la précision des analogiques sont malgré tout assez bons,
et c'est peut-être suffisant pour vous. Mais pour le savoir, il faut tester.
Les servos ont des dimensions qui sont souvent différentes d'un modèle à l'autre.
On trouve les minis qui font 8 à 10g, les moyens qui font 20 à 30 grammes, les "standards" qui font 40 à 60 grammes, les "BB" qui sont applatis, et beaucoup d'autres variantes.
Personnellement, au départ, je voulais utiliser un peu toutes les tailles, selon les articulations, et notamment je pensais pouvoir prendre beaucoup de minis.
Mais, je me suis rendu compte que les minis n'ont pas beaucoup de puissance, et j'ai dû me rabattre vers des "standards améliorés", du moins pour les jambes.
Pour relier les servos, il faut des pièces rigides. Il faut choisir la matière.
Personnellement j'ai choisi l'aluminium, mais on peut prendre autre chose.
Ensuite, il faut découper, limer et percer, ce qui n'est pas évident à faire, car il faut être très précis.
Quand j'ai commencé, j'ai grandement sous estimé le nombre de trous que j'aurai à faire.
Pour un robot entier, il doit falloir entre 200 et 600 trous.
J'ai investi dans une "perceuse colonne" avec une "table croisée" en-dessous, et je me félicite de les avoir.
La partie électronique est essentielle bien sûr.
Il existe des modules qui aident, mais ils ne font pas tout, et surtout il faut comprendre comment s'en servir.
Des ajouts sont pratiquement inévitables, pour lesquels le fer à souder sera mis à contribution.
Pour la programmation, c'est facile pour moi qui ait 30 ans d'informatique derrière moi.
Mais pour les autres, c'est surement une étape un peu difficile.
Il faut souvent lire de la documentation ou des exemples en anglais avec du vocabulaire qui est spécialisé,
sans parler de l'installaiton des outils, de l'algorithmique, du codage, du débugage, etc.
Enfin, il reste la modèlisation de la marche.
Je croyais initialement, qu'il suffisait de soulever une jambe et de l'allonger, puis de faire la même chose avec l'autre jambe.
En fait, c'est plus compliqué que ça.
Par exemple, avant de pouvoir soulever une jambe, il faut déplacer le poids du corps ailleurs. Sinon, c'est comme si on enlevait une colonne qui soutient une maison, et tout tombe par terre.
Et il y a d'autres difficultés que je n'ai pas encore bien vues.
Bref, tout ça demande :
- pas mal d'argent (non seulement les bons servos et le bon outillage coutent chers, mais en plus il y a beaucoup de "déchets" comme des servos qui grillent, des servos qu'on a mal choisis au départ, des morceaux mal coupés ou mal percés, etc.),
- beaucoup de temps et donc de persévérance (je compte au moins 5 minutes par découpe, et 3 minutes par trou),
- de ne pas avoir peur de revenir en arrière très souvent, parce qu'on se trompe inévitablement, et qu'il faut souvent faire, défaire, et refaire jusqu'à obtenir le bon résultat.
Bon courage.
Je ne vais pour vous jeter la pierre à mon tour, puisque j'essaye de faire un peu la même chose.
C'est un bon projet, mais c'est difficile pour un amateur.
Voici quelques petites pistes.
Beaucoup de robots de ce genre sont construits à partir de servomoteurs, mais pas tous.
Un problème avec les servos, c'est qu'ils ont une rotation maximale qui est généralement de 170 degrés, parfois plus, et parfois moins.
Or, cette limitation empêche des mouvements amusants comme le grand écart, ou des tours avec les bras.
Il faudra choisir la bonne puissance.
Ce n'est pas facile, parce que les spécifications des constructeurs sont évidemment un peu gonflées.
Il est difficile de s'y fier. Les torques indiqués donnent un ordre de grandeur.
Mais il faut tester en situation réelle pour se rendre compte si un moteur est trop faible ou pas.
Les servos peuvent être de type "analogique" ou "digitaux".
Les "digitaux" ont un temps de réponse plus rapide et sont plus précis.
Mais ils font du bruit dès que le servo fait un peu d'effort, et ça devient vite très énervant.
Par ailleurs, le temps de réponse et la précision des analogiques sont malgré tout assez bons,
et c'est peut-être suffisant pour vous. Mais pour le savoir, il faut tester.
Les servos ont des dimensions qui sont souvent différentes d'un modèle à l'autre.
On trouve les minis qui font 8 à 10g, les moyens qui font 20 à 30 grammes, les "standards" qui font 40 à 60 grammes, les "BB" qui sont applatis, et beaucoup d'autres variantes.
Personnellement, au départ, je voulais utiliser un peu toutes les tailles, selon les articulations, et notamment je pensais pouvoir prendre beaucoup de minis.
Mais, je me suis rendu compte que les minis n'ont pas beaucoup de puissance, et j'ai dû me rabattre vers des "standards améliorés", du moins pour les jambes.
Pour relier les servos, il faut des pièces rigides. Il faut choisir la matière.
Personnellement j'ai choisi l'aluminium, mais on peut prendre autre chose.
Ensuite, il faut découper, limer et percer, ce qui n'est pas évident à faire, car il faut être très précis.
Quand j'ai commencé, j'ai grandement sous estimé le nombre de trous que j'aurai à faire.
Pour un robot entier, il doit falloir entre 200 et 600 trous.
J'ai investi dans une "perceuse colonne" avec une "table croisée" en-dessous, et je me félicite de les avoir.
La partie électronique est essentielle bien sûr.
Il existe des modules qui aident, mais ils ne font pas tout, et surtout il faut comprendre comment s'en servir.
Des ajouts sont pratiquement inévitables, pour lesquels le fer à souder sera mis à contribution.
Pour la programmation, c'est facile pour moi qui ait 30 ans d'informatique derrière moi.
Mais pour les autres, c'est surement une étape un peu difficile.
Il faut souvent lire de la documentation ou des exemples en anglais avec du vocabulaire qui est spécialisé,
sans parler de l'installaiton des outils, de l'algorithmique, du codage, du débugage, etc.
Enfin, il reste la modèlisation de la marche.
Je croyais initialement, qu'il suffisait de soulever une jambe et de l'allonger, puis de faire la même chose avec l'autre jambe.
En fait, c'est plus compliqué que ça.
Par exemple, avant de pouvoir soulever une jambe, il faut déplacer le poids du corps ailleurs. Sinon, c'est comme si on enlevait une colonne qui soutient une maison, et tout tombe par terre.
Et il y a d'autres difficultés que je n'ai pas encore bien vues.
Bref, tout ça demande :
- pas mal d'argent (non seulement les bons servos et le bon outillage coutent chers, mais en plus il y a beaucoup de "déchets" comme des servos qui grillent, des servos qu'on a mal choisis au départ, des morceaux mal coupés ou mal percés, etc.),
- beaucoup de temps et donc de persévérance (je compte au moins 5 minutes par découpe, et 3 minutes par trou),
- de ne pas avoir peur de revenir en arrière très souvent, parce qu'on se trompe inévitablement, et qu'il faut souvent faire, défaire, et refaire jusqu'à obtenir le bon résultat.
Bon courage.
#56703 Tebby one
Posté par
sur 20 juin 2013 - 05:06
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Oui, c'est cher, et c'est un problème important pour beaucoup de monde.
La robotique, actuellement, est un sport de riches.
Par exemple, il parait que le robot Asimo couterait cent mille dollars.
Les prix des servos moteurs que l'on voit dans les kits avancés coutent entre 50 et 200 euros l'unité.
Et comme il en faut une bonne douzaine, ca explique que ces kits soient vendus entre 2000 et 15000 euros.
Peut-être qu'on peut utiliser des moteurs moins chers.
C'est ce que j'essaye de faire, mais mon projet débute, et je n'ai pas encore réussi.
Des modifications sont possible avec ces kits.
Mais il ne s'agit pas de lego, donc ça peut être un peu compliqué.
Ca dépend de ce qu'on veut faire.
L'expression "servo standard" est utilisée par de nombreux fabricants, et signifie que le servo se présente dans un boitier d'environ 40mm de long, d'environ 20mm de large, d'environ 40 à 50mm de haut, et qui a des petites "oreilles" ou "bras" sur les côtés pour la fixation, avec deux trous espacés d'exactement 10mm dans chaque oreille (ou bras), et que le servo a un torque théorique d'environ 4 à 6 kilogrammes au centimètre.
Mon expression personnelle "servomoteur standard amélioré" signifie un servo qui se présente dans une boitier standard, mais qui a un torque théorique plus grand que 6 kg cm.
La robotique, actuellement, est un sport de riches.
Par exemple, il parait que le robot Asimo couterait cent mille dollars.
Les prix des servos moteurs que l'on voit dans les kits avancés coutent entre 50 et 200 euros l'unité.
Et comme il en faut une bonne douzaine, ca explique que ces kits soient vendus entre 2000 et 15000 euros.
Peut-être qu'on peut utiliser des moteurs moins chers.
C'est ce que j'essaye de faire, mais mon projet débute, et je n'ai pas encore réussi.
Des modifications sont possible avec ces kits.
Mais il ne s'agit pas de lego, donc ça peut être un peu compliqué.
Ca dépend de ce qu'on veut faire.
L'expression "servo standard" est utilisée par de nombreux fabricants, et signifie que le servo se présente dans un boitier d'environ 40mm de long, d'environ 20mm de large, d'environ 40 à 50mm de haut, et qui a des petites "oreilles" ou "bras" sur les côtés pour la fixation, avec deux trous espacés d'exactement 10mm dans chaque oreille (ou bras), et que le servo a un torque théorique d'environ 4 à 6 kilogrammes au centimètre.
Mon expression personnelle "servomoteur standard amélioré" signifie un servo qui se présente dans une boitier standard, mais qui a un torque théorique plus grand que 6 kg cm.
#56698 Tebby one
Posté par
sur 20 juin 2013 - 10:31
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Oui, je posterai des photos à la fin.
Le schéma est simple : une tête, un tronc, deux bras et deux jambes.
J'ai dépensé quelques centaines d'euros jusqu'à présent.
En relisant vos messages, j'ai l'impression, que le mieux pour vous, serait d'avoir un kit.
Voyez par exemple ceux de Robotshop : http://www.robotshop.com/eu/plateformes-developpement-bipedes.html
Le schéma est simple : une tête, un tronc, deux bras et deux jambes.
J'ai dépensé quelques centaines d'euros jusqu'à présent.
En relisant vos messages, j'ai l'impression, que le mieux pour vous, serait d'avoir un kit.
Voyez par exemple ceux de Robotshop : http://www.robotshop.com/eu/plateformes-developpement-bipedes.html
#58296 Table oscillante
Posté par
sur 09 novembre 2013 - 12:22
dans
Mécanique
Il existe des moteurs vibreurs qui sont, par exemple, employés dans les téléphones portables.
En général, ils sont petits, donc, ils ne peuvent pas faire osciller un récipient trop lourd sous lequel ils seraient placés.
Mais ils peuvent être mis au-dessus du récipient, et on peut leur coller une plume ou une brosse à dent pour augmenter l'amplitude du mouvement.
Robotshop en propose 4 modèles différents : http://www.robotshop.com/eu/fr/moteurs-actuateurs.html?dir=asc&order=price
En général, ils sont petits, donc, ils ne peuvent pas faire osciller un récipient trop lourd sous lequel ils seraient placés.
Mais ils peuvent être mis au-dessus du récipient, et on peut leur coller une plume ou une brosse à dent pour augmenter l'amplitude du mouvement.
Robotshop en propose 4 modèles différents : http://www.robotshop.com/eu/fr/moteurs-actuateurs.html?dir=asc&order=price
#56899 Table avec chariot mobile en X et en Y.
Posté par
sur 30 juin 2013 - 12:01
dans
Bras robots, pinces, tourelles, et autres manipulateurs
En fait, tu as raison !
On ne peut pas faire des choses très précises avec les servomoteurs à rotation continue basiques que j'ai utilisés.
Au début (quand j'ai posté la présentation de ma machine), je n'avais pas fait beaucoup de tests, et j'étais très optimiste.
Plus tard, je me suis rendu compte, qu'avec deux envois d'ondes électrique identiques quant à la forme et à la durée, le servomoteur ne produisait pas toujours exactement le même mouvement.
J'ai noté des différences pouvant aller jusqu'à un quart de tour, ou même un demi-tour.
Etant donné, que j'utilise des tiges filetées ordinaires, qui ont un pas assez petit, la différence d'un quart de tour ne voit pas beaucoup, moins d'un ou deux milimètres d'écart.
C'est peu, mais les écarts s'accumulent quand on fait beaucoup de mouvements, et finalement la dérive devient trop grande pour un usage convenable.
Donc, je mettrais des moteurs pas à pas, quand j'aurais le temps.
On ne peut pas faire des choses très précises avec les servomoteurs à rotation continue basiques que j'ai utilisés.
Au début (quand j'ai posté la présentation de ma machine), je n'avais pas fait beaucoup de tests, et j'étais très optimiste.
Plus tard, je me suis rendu compte, qu'avec deux envois d'ondes électrique identiques quant à la forme et à la durée, le servomoteur ne produisait pas toujours exactement le même mouvement.
J'ai noté des différences pouvant aller jusqu'à un quart de tour, ou même un demi-tour.
Etant donné, que j'utilise des tiges filetées ordinaires, qui ont un pas assez petit, la différence d'un quart de tour ne voit pas beaucoup, moins d'un ou deux milimètres d'écart.
C'est peu, mais les écarts s'accumulent quand on fait beaucoup de mouvements, et finalement la dérive devient trop grande pour un usage convenable.
Donc, je mettrais des moteurs pas à pas, quand j'aurais le temps.
#56503 Table avec chariot mobile en X et en Y.
Posté par
sur 04 juin 2013 - 09:31
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Bonjour,
Voici ma dernière réalisation : une table CNC.

A gauche, un servomoteur à rotation continue fait tourner une tige filetée, au centre. Sur les côtés, des tiges coulissantes de tiroir sont montées.
Ensuite, des traverses sont placées entre les tiges. Un deuxième étage est réalisé selon le même principe.
Et voici le résultat final :

Les deux étaux se déplacent avec précision, en X et Y.
Cela permet de placer une pièce à percer, exactement à l'endroit voulu, sous le foret d'une perceuse colonne.
Un troisième servomoteur, placé tout en haut, permet d'abaisser le foret.
Vidéo pour la voir en action :
http://www.youtube.com/watch?v=iPGFXn0qL7A
Elle se commande à l'aide d'un programme Windows et/ou d'un programme Android qui envoie des instructions via une connexion Bluetooth.
Je vais l'utiliser pour percer les nombreux trous qu'il faut pour les pièces de mon prochain robot.
Si elle marche bien, j'en ferais une petite série qui sera vendu à 80 euros l'unité.
Je ferai aussi une petite "scie colonne" qui se mettra à la place de la perceuse colonne pour découper des pièces avec précision.
Voilà, c'est OliCNC.
Voici ma dernière réalisation : une table CNC.
A gauche, un servomoteur à rotation continue fait tourner une tige filetée, au centre. Sur les côtés, des tiges coulissantes de tiroir sont montées.
Ensuite, des traverses sont placées entre les tiges. Un deuxième étage est réalisé selon le même principe.
Et voici le résultat final :
Les deux étaux se déplacent avec précision, en X et Y.
Cela permet de placer une pièce à percer, exactement à l'endroit voulu, sous le foret d'une perceuse colonne.
Un troisième servomoteur, placé tout en haut, permet d'abaisser le foret.
Vidéo pour la voir en action :
http://www.youtube.com/watch?v=iPGFXn0qL7A
Elle se commande à l'aide d'un programme Windows et/ou d'un programme Android qui envoie des instructions via une connexion Bluetooth.
Je vais l'utiliser pour percer les nombreux trous qu'il faut pour les pièces de mon prochain robot.
Si elle marche bien, j'en ferais une petite série qui sera vendu à 80 euros l'unité.
Je ferai aussi une petite "scie colonne" qui se mettra à la place de la perceuse colonne pour découper des pièces avec précision.
Voilà, c'est OliCNC.
#56532 Table avec chariot mobile en X et en Y.
Posté par
sur 05 juin 2013 - 06:57
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Merci beaucoup pour tous vos messages positifs.
Vous êtes super !
Les servomoteurs à rotation continue me paraissent fiables pour le moment.
Mais, c'est vrai que ça aurait été bien de prendre des moteurs pas à pas.
Je les aurais probablement choisis, si j'avais vu plus tôt le robot Scribe v2 de Leon http://www.robot-maker.com/forum/topic/8690-robot-scribe-version-2
Sa machine m'impressionne.
Avoir un mouvement par poulies et chenilles est sans doute une meilleur solution que celle des tiges filetées.
Je vais bientôt aborder la prochaine étape qui est de faire un robot bipède ayant de bonnes jambes et une bonne vue pour jouer au football.
Ca va me prendre peut-être trois mois ou un an.
A+
Vous êtes super !
Les servomoteurs à rotation continue me paraissent fiables pour le moment.
Mais, c'est vrai que ça aurait été bien de prendre des moteurs pas à pas.
Je les aurais probablement choisis, si j'avais vu plus tôt le robot Scribe v2 de Leon http://www.robot-maker.com/forum/topic/8690-robot-scribe-version-2
Sa machine m'impressionne.
Avoir un mouvement par poulies et chenilles est sans doute une meilleur solution que celle des tiges filetées.
Je vais bientôt aborder la prochaine étape qui est de faire un robot bipède ayant de bonnes jambes et une bonne vue pour jouer au football.
Ca va me prendre peut-être trois mois ou un an.
A+
#57784 ssougnez
Posté par
sur 12 septembre 2013 - 08:42
dans
Et si vous vous présentiez?
Etant programmeur à la base, comme toi, j'ai cherché à combler mes lacunes dans les domaines de l'électronique et des moteurs.
Pour l'électronique, j'ai lu de la documentation, par exemple à http://itp.nyu.edu/physcomp/Tutorials/Tutorials , et je me suis tout particulèrement intéressé à la carte Arduino. Elle est assez bon marché et facile à utiliser pour commencer des premiers montages. Elle m'a permis de comprendre beaucoup de choses et de prendre confiance.
Pour les moteurs, je suis allé voir ce que proposent les magasins de modèlisme de ma région. On pense souvent dès le début aux moteurs pas à pas. Ils ont l'avantage d'être précis, mais ils sont souvent moins puissants, plus chers, et plus difficile à relier, que les moteurs classiques ou que les servomoteurs.
Bienvenue et bon courage.
Pour l'électronique, j'ai lu de la documentation, par exemple à http://itp.nyu.edu/physcomp/Tutorials/Tutorials , et je me suis tout particulèrement intéressé à la carte Arduino. Elle est assez bon marché et facile à utiliser pour commencer des premiers montages. Elle m'a permis de comprendre beaucoup de choses et de prendre confiance.
Pour les moteurs, je suis allé voir ce que proposent les magasins de modèlisme de ma région. On pense souvent dès le début aux moteurs pas à pas. Ils ont l'avantage d'être précis, mais ils sont souvent moins puissants, plus chers, et plus difficile à relier, que les moteurs classiques ou que les servomoteurs.
Bienvenue et bon courage.
#59874 soucis d'affichage - lib stdin
Posté par
sur 12 février 2014 - 02:35
dans
Programmation
Ca me fait la même chose avec ce petit programme.
Le problème vient de la saisie, qui n'est pas la saisie d'un seul caractère ('5'), mais qui est en fait la saisie de deux caractères ('5' et '\n'). En plus, il est inutile de réafficher le caractère car il est affiché par défaut lors de la saisie.
Pour palier à cet inconvénient, je propose deux solutions (que j'ai testées) :
Le problème vient de la saisie, qui n'est pas la saisie d'un seul caractère ('5'), mais qui est en fait la saisie de deux caractères ('5' et '\n'). En plus, il est inutile de réafficher le caractère car il est affiché par défaut lors de la saisie.
Pour palier à cet inconvénient, je propose deux solutions (que j'ai testées) :
char c, d;
for (; c != 'Q'<img src='http://www.robot-maker.com/forum/public/style_emoticons/<#EMO_DIR#>/wink.gif' class='bbc_emoticon' alt=';)' />/> {
printf("\n veuillez inscrire une nouvelle lettre : ");
c = getchar();
d = getchar();
}
char c, s[200];
for (; c != 'Q'<img src='http://www.robot-maker.com/forum/public/style_emoticons/<#EMO_DIR#>/wink.gif' class='bbc_emoticon' alt=';)' />/> {
printf("\n veuillez inscrire une nouvelle lettre : ");
gets(s);
c = s[0];
}
#57188 servos ssc-32 rotation anormale
Posté par
sur 23 juillet 2013 - 12:07
dans
Electronique
Oui, ça ne m'étonne pas trop que le point neutre soit à 1400, car ce genre de servomoteurs bons marchés, ne sont pas très précis.
Je n'ai pas utilisé ces servos-là, mais d'autres qui sont très proches (http://www.robotshop.com/eu/servomoteur-a-rotation-continu-parallax-futaba-2.html). Sur les miens, il y a une petite vis près du cable, que l'on peut tourner pour ajuster le point neutre à la bonne valeur.
Pour le problème de la vibration à 1200, 1300, et 1400, cela peut venir, soit d'un écart trop faible par rapport à la valeur précédente, soit d'un défaut du servo. Ce défaut peut venir des tests précédents quand des valeurs en dehors de l'intervalle 800-2200 ont été utilisées, ou bien à cause d'une surtension qui aurait eu lieu, ou au contraire à cause d'un manque de courant. Les servos sont assez fragiles, et personnellement, j'en ai déjà endommagés trois ou quatre. Il faudrait voir si le problème existe aussi avec l'autre servo.
Comment sont alimentés en courant ces servos ? Quel est le voltage ? Est-ce que c'est par une batterie ou par un transformateur ? Est-ce qu'il y a un régulateur de tension entre la source d'alimentation et les servos ?
Je n'ai pas utilisé ces servos-là, mais d'autres qui sont très proches (http://www.robotshop.com/eu/servomoteur-a-rotation-continu-parallax-futaba-2.html). Sur les miens, il y a une petite vis près du cable, que l'on peut tourner pour ajuster le point neutre à la bonne valeur.
Pour le problème de la vibration à 1200, 1300, et 1400, cela peut venir, soit d'un écart trop faible par rapport à la valeur précédente, soit d'un défaut du servo. Ce défaut peut venir des tests précédents quand des valeurs en dehors de l'intervalle 800-2200 ont été utilisées, ou bien à cause d'une surtension qui aurait eu lieu, ou au contraire à cause d'un manque de courant. Les servos sont assez fragiles, et personnellement, j'en ai déjà endommagés trois ou quatre. Il faudrait voir si le problème existe aussi avec l'autre servo.
Comment sont alimentés en courant ces servos ? Quel est le voltage ? Est-ce que c'est par une batterie ou par un transformateur ? Est-ce qu'il y a un régulateur de tension entre la source d'alimentation et les servos ?
#57182 servos ssc-32 rotation anormale
Posté par
sur 22 juillet 2013 - 09:29
dans
Electronique
"p" signifie "pulse" en anglais ou "pulsation" en français. Ca correspond à des ondes.
Les servos sont faits pour fonctionner avec des "p" entre 1000 et 2000, et parfois un peu plus ou un peu moins, par exemple, entre 800 et 2200.
Il ne faut pas sortir de la fourchette 800-2200, sinon, on risque d'endommager le servomoteur, ou en tous cas, on n'aura pas de résultat intéressant.
Donc, il ne faut pas faire p0 ni p400. Il faut rester entre p1000 et p2000, et avec certains servos, entre p800 et p2200.
1500 est la valeur médiane. Ca positionne le palonnier au milieu. Parfois, c'est 1480 ou 1450 ou encore 1550 au lieu de 1500.
Pour avoir le mouvement le plus petit, il faut faire une différence de 30 environ. Par exemple, si le servo est à 1500, il faut envoyer 1530. Si on n'envoie que 1510, le servo considèrera que l'écart n'est pas assez grand et il ne bougera pas. Cela dépend bien sûr des servos. Certains réagiront avec un écart de 20 ou de 15. D'autres auront besoin d'un écart minimum de 50.
Edit :
Je vois que ce sont des servos à rotation continue, et je parlais des servos standards qui sont limités à des mouvements de 180 degrés.
Mais, le principe reste le même.
Pour une vitesse nulle (un arrêt), il faut envoyer la valeur médiane qui est p1500, plus ou moins un chouia (p1510, ou p1480, selon le calibrage du servo).
Pour une petite vitesse dans un sens, il faut envoyer p1400, et p1600 pour une petite vitesse dans l'autre sens.
Pour une très grande vitesse dans un sens, il faut envoyer p1000, et p2000 pour une très grande vitesse dans l'autre sens.
Ne pas sortir de la fourchette 1000-2000 (ou 800-2200).
Les servos sont faits pour fonctionner avec des "p" entre 1000 et 2000, et parfois un peu plus ou un peu moins, par exemple, entre 800 et 2200.
Il ne faut pas sortir de la fourchette 800-2200, sinon, on risque d'endommager le servomoteur, ou en tous cas, on n'aura pas de résultat intéressant.
Donc, il ne faut pas faire p0 ni p400. Il faut rester entre p1000 et p2000, et avec certains servos, entre p800 et p2200.
1500 est la valeur médiane. Ca positionne le palonnier au milieu. Parfois, c'est 1480 ou 1450 ou encore 1550 au lieu de 1500.
Pour avoir le mouvement le plus petit, il faut faire une différence de 30 environ. Par exemple, si le servo est à 1500, il faut envoyer 1530. Si on n'envoie que 1510, le servo considèrera que l'écart n'est pas assez grand et il ne bougera pas. Cela dépend bien sûr des servos. Certains réagiront avec un écart de 20 ou de 15. D'autres auront besoin d'un écart minimum de 50.
Edit :
Je vois que ce sont des servos à rotation continue, et je parlais des servos standards qui sont limités à des mouvements de 180 degrés.
Mais, le principe reste le même.
Pour une vitesse nulle (un arrêt), il faut envoyer la valeur médiane qui est p1500, plus ou moins un chouia (p1510, ou p1480, selon le calibrage du servo).
Pour une petite vitesse dans un sens, il faut envoyer p1400, et p1600 pour une petite vitesse dans l'autre sens.
Pour une très grande vitesse dans un sens, il faut envoyer p1000, et p2000 pour une très grande vitesse dans l'autre sens.
Ne pas sortir de la fourchette 1000-2000 (ou 800-2200).
#57992 Servomoteur force ? Arduino
Posté par
sur 03 octobre 2013 - 09:50
dans
Programmation
Ce n'est pas possible avec les servos à rotation continue que j'ai testés, qui sont assez courant http://www.robotshop.com/eu/servomoteur-a-rotation-continu-parallax-futaba-2.html
Ils n'ont que trois fils : +5V, masse, et signal. Le fil du signal ne fonctionne que dans le sens : de la carte vers le servo.
Les servos dit "intelligents" ont un quatrième fil qui donne des informations dans l'autre sens, mais je n'ai jamais vu ce genre de servo faire une rotation continue.
Tester le courant consommé pourrait être une solution.
Ou bien, avoir une détection de la vitesse par une roue bicolore et une capteur lumineux.
Ou par d'autres capteurs, comme un capteur à ultrasons, un capteur flexible, un accéléromètre, etc.
Voir http://www.robotshop.com/eu/capteurs.html
Ils n'ont que trois fils : +5V, masse, et signal. Le fil du signal ne fonctionne que dans le sens : de la carte vers le servo.
Les servos dit "intelligents" ont un quatrième fil qui donne des informations dans l'autre sens, mais je n'ai jamais vu ce genre de servo faire une rotation continue.
Tester le courant consommé pourrait être une solution.
Ou bien, avoir une détection de la vitesse par une roue bicolore et une capteur lumineux.
Ou par d'autres capteurs, comme un capteur à ultrasons, un capteur flexible, un accéléromètre, etc.
Voir http://www.robotshop.com/eu/capteurs.html
#58228 Servo en direct sur une Arduino
Posté par
sur 31 octobre 2013 - 07:51
dans
Conseils et aide aux débutants, livres et kits en robotique
Le tutorial sweep marche très bien. Je m'en suis déjà servi.
Le bidouillage de servo n'est pas obligatoire, parce qu'on trouve toutes sortes de servos dans le commerce, y compris des servos à rotation continue.
Il existe des shields pour les servos, si on veut, mais c'est facultatif. Bizarrement, ils s'appellent "sensor shield", par exemple http://www.miniinthebox.com/fr/shield-v5-0-carte-d-extension-du-capteur-compatible-arduino-capteur_p639011.html
Ils présentent deux avantages :
1. Ils permettent de brancher une alimentation qui est plus puissante que celle du Vout de la Arduino. Cette alimentation va alimenter ce qui est connecté au shield, et peut aussi alimenter la Arduino.
2. La connectique est simplifiée. Il n'y a pas de soudure à faire. Le cable à trois fils du servo se raccorde facilement dans n'importe lequel des connecteurs à trois broches du shield.
Et quand on se sert de servos, on a parfois besoin de les tester. Pour cela, il y a par exemple ce petit testeur pas cher que j'aime bien : http://www.miniinthebox.com/fr/testeur-de-servo-rc-c1_p340449.html
Le bidouillage de servo n'est pas obligatoire, parce qu'on trouve toutes sortes de servos dans le commerce, y compris des servos à rotation continue.
Il existe des shields pour les servos, si on veut, mais c'est facultatif. Bizarrement, ils s'appellent "sensor shield", par exemple http://www.miniinthebox.com/fr/shield-v5-0-carte-d-extension-du-capteur-compatible-arduino-capteur_p639011.html
Ils présentent deux avantages :
1. Ils permettent de brancher une alimentation qui est plus puissante que celle du Vout de la Arduino. Cette alimentation va alimenter ce qui est connecté au shield, et peut aussi alimenter la Arduino.
2. La connectique est simplifiée. Il n'y a pas de soudure à faire. Le cable à trois fils du servo se raccorde facilement dans n'importe lequel des connecteurs à trois broches du shield.
Et quand on se sert de servos, on a parfois besoin de les tester. Pour cela, il y a par exemple ce petit testeur pas cher que j'aime bien : http://www.miniinthebox.com/fr/testeur-de-servo-rc-c1_p340449.html
#58231 Servo en direct sur une Arduino
Posté par
sur 01 novembre 2013 - 10:54
dans
Conseils et aide aux débutants, livres et kits en robotique
Oui ce testeur peut servir à positionner un servo avant un montage.
Il a trois modes.
1. Au début, il est en mode manuel. Le servo se positionne en fonctionne du gros bouton rotatif du potentiomètre.
2. Ensuite, si on appuie sur un petit bouton, alors le testeur passe en mode point neutre. C'est-à dire qu'il envoie la valeur 1500 au servo.
3. Si on réappuie, sur le bouton, alors le testeur passe en mode automatique. Il envoie des valeurs comprises entre 1000 et 2000 et de 2000 à 1000, ce qui fait bouger le palonnier du servo comme un essuie-glace.
4. Si on réappuie sur le bouton, le testeur revient au premier mode qui est le mode manuel.
Le testeur permet de raccorder de 1 à 3 servos. Ca peut mettre en évidence des différences de comportement entre des servos différents.
Et le testeur peut être alimenté en 5V ou en 6V, et peut-être même avec plus de volts.
Il existe d'autres modèles similaires faits par d'autres fabricants, mais en général ils sont plus chers que celui-là, et pas mieux.
Ce modèle est commercialisé par MiniInTheBox, qui est un distributeur de Hong Kong. MiniInTheBox ne fait pas ses envois par la poste, mais par UPS. C'est plus rapide par UPS, mais ça peut prendre tout de même plusieurs jours voire plusieurs semaines. Mon dernier achat a été livré 6 jours après la commande. UPS demande à l'arrivée que l'on paye en plus la TVA française et les droits de douane, ce qui fait un surcoût d'une vingtaine d'euros pour une commande de 80 euros. De plus, il vaut mieux être là quand UPS passe, sinon il faut aller chercher le colis dans un dépôt qui se trouve en général assez loin de chez soi.
Deux autres modèles sont distribués par dx.com : http://dx.com/p/e-sky-ek2-0907-9-pin-mini-servo-tester-for-r-c-helicopters-15594 et http://dx.com/p/3-mode-ccpm-servo-esc-consistency-master-checker-for-r-c-helicopter-122546 . DX est un distributeur de Hong Kong. Il fait les envois par la Poste, ce qui est parfois un peu long, entre 1 et 4 semaines. Il n'y a pas de surcoût à la reception.
Deux autres modèles sont distribués par Conrad, voir http://www.conrad.fr/ce/fr/overview/1207055/Accessoires-divers-pour-servos . Conrad est une société allemande qui a une filliale en France. Les colis sont envoyés par la Poste en 3 à 6 jours, sans surcoût à la réception.
Le testeur n'est pas obligatoire, parce qu'on peut faire la même chose avec une Arduino, mais c'est pratique.
Il a trois modes.
1. Au début, il est en mode manuel. Le servo se positionne en fonctionne du gros bouton rotatif du potentiomètre.
2. Ensuite, si on appuie sur un petit bouton, alors le testeur passe en mode point neutre. C'est-à dire qu'il envoie la valeur 1500 au servo.
3. Si on réappuie, sur le bouton, alors le testeur passe en mode automatique. Il envoie des valeurs comprises entre 1000 et 2000 et de 2000 à 1000, ce qui fait bouger le palonnier du servo comme un essuie-glace.
4. Si on réappuie sur le bouton, le testeur revient au premier mode qui est le mode manuel.
Le testeur permet de raccorder de 1 à 3 servos. Ca peut mettre en évidence des différences de comportement entre des servos différents.
Et le testeur peut être alimenté en 5V ou en 6V, et peut-être même avec plus de volts.
Il existe d'autres modèles similaires faits par d'autres fabricants, mais en général ils sont plus chers que celui-là, et pas mieux.
Ce modèle est commercialisé par MiniInTheBox, qui est un distributeur de Hong Kong. MiniInTheBox ne fait pas ses envois par la poste, mais par UPS. C'est plus rapide par UPS, mais ça peut prendre tout de même plusieurs jours voire plusieurs semaines. Mon dernier achat a été livré 6 jours après la commande. UPS demande à l'arrivée que l'on paye en plus la TVA française et les droits de douane, ce qui fait un surcoût d'une vingtaine d'euros pour une commande de 80 euros. De plus, il vaut mieux être là quand UPS passe, sinon il faut aller chercher le colis dans un dépôt qui se trouve en général assez loin de chez soi.
Deux autres modèles sont distribués par dx.com : http://dx.com/p/e-sky-ek2-0907-9-pin-mini-servo-tester-for-r-c-helicopters-15594 et http://dx.com/p/3-mode-ccpm-servo-esc-consistency-master-checker-for-r-c-helicopter-122546 . DX est un distributeur de Hong Kong. Il fait les envois par la Poste, ce qui est parfois un peu long, entre 1 et 4 semaines. Il n'y a pas de surcoût à la reception.
Deux autres modèles sont distribués par Conrad, voir http://www.conrad.fr/ce/fr/overview/1207055/Accessoires-divers-pour-servos . Conrad est une société allemande qui a une filliale en France. Les colis sont envoyés par la Poste en 3 à 6 jours, sans surcoût à la réception.
Le testeur n'est pas obligatoire, parce qu'on peut faire la même chose avec une Arduino, mais c'est pratique.
#54908 Roulements a billes
Posté par
sur 29 mars 2013 - 01:26
dans
Mécanique
Une petite astuce liée au sujet,
est d'utiliser des petits patins en téflon. Ca diminue bien les frottements.
Dans mon cas, j'ai un axe cylindrique qui passe dans le trou central d'une pièce rectangulaire.
Et pour limiter les mouvements latéraux de l'axe, j'ai mis des rondelles métalliques de chaque côté.
Or, je me suis aperçu, que les frottements étaient surtout importants au niveau des rondelles, et peu importants au niveau du trou.
Je mets donc des rondelles de téflon entre les rondelles métalliques et la pièce, et ça va beaucoup mieux.
est d'utiliser des petits patins en téflon. Ca diminue bien les frottements.
Dans mon cas, j'ai un axe cylindrique qui passe dans le trou central d'une pièce rectangulaire.
Et pour limiter les mouvements latéraux de l'axe, j'ai mis des rondelles métalliques de chaque côté.
Or, je me suis aperçu, que les frottements étaient surtout importants au niveau des rondelles, et peu importants au niveau du trou.
Je mets donc des rondelles de téflon entre les rondelles métalliques et la pièce, et ça va beaucoup mieux.
#60648 Roue compatible pour un servo ?
Posté par
sur 02 mai 2014 - 09:03
dans
Reventes, matériel d'occasion, récup
Oui, généralement, les servos sont vendus avec des palonniers.
#60646 Roue compatible pour un servo ?
Posté par
sur 01 mai 2014 - 11:22
dans
Reventes, matériel d'occasion, récup
Edit : Je n'avais pas bien vu la description des produits. Donc j'efface mon commentaire qui n'était pas pertinent.
A priori, Robotshop dit que c'est compatible, et il y a une photo de la roue avec un servo du même genre. Donc, ca devrait marcher.
ReEdit : Cela dit, Robotshop parle de compatibilité avec des servos "standard", et celui qui est choisi n'est pas "standard" mais "micro" (ou "mini"). Les servos standards sont des servos qui font en général 40 grammes et qui ont des dimensions d'environ 40x40x20mm, comme celui-là. Normalement, on devrait pouvoir dévisser la vis noire du dessus du servo, enlever le palonnier en croix, mettre la roue et la fixer en revissant la vis noire.
A priori, Robotshop dit que c'est compatible, et il y a une photo de la roue avec un servo du même genre. Donc, ca devrait marcher.
ReEdit : Cela dit, Robotshop parle de compatibilité avec des servos "standard", et celui qui est choisi n'est pas "standard" mais "micro" (ou "mini"). Les servos standards sont des servos qui font en général 40 grammes et qui ont des dimensions d'environ 40x40x20mm, comme celui-là. Normalement, on devrait pouvoir dévisser la vis noire du dessus du servo, enlever le palonnier en croix, mettre la roue et la fixer en revissant la vis noire.
#58127 [controlleur de servo] et puissance
Posté par
sur 22 octobre 2013 - 12:49
dans
Energie
Est-ce que ça a déjà marché au moins une fois, quand tout est assemblé ?
Quelle est la marque et quel est le modèle des servos ?
Est-ce que l'abaisseur de tension n'aurait pas été oublié ?
Les servos fonctionnent en 6V (sauf exception). La batterie fait 7.4V (en réalité, elle peut même monter jusqu'à 8V). Il ne faut pas donner trop de tension aux servomoteurs.
Les servos sont reliés à la carte qui est montrée dans le lien. Cette carte est alimentée en courant via les deux bornes bleues. Si la batterie est directement branchée à ces bornes, alors ça ne va pas, car il y aura une tension de 7.4 V au lieu de 6V, ce qui peut provoquer des comportements anormaux, et ce qui peut griller les servos. Il faut mettre un module abaisseur de tension, ou régulateur de tension entre la batterie et les bornes. S'il y a en a un, quelle est sa marque et quel est son modèle ? Il faut qu'il soit réglé pour donner les bonnes valeurs de tension et qu'il puisse fournir suffisamment de courant.
Enfin, le problème peut venir aussi de servos qui seraient endommagés. Dans ce cas, il peut arriver qu'ils marchent bien sans charge et qu'ils se mettent à ne plus fonctionner ou à avoir un comportement bizarre avec une charge à déplacer.
Quelle est la marque et quel est le modèle des servos ?
Est-ce que l'abaisseur de tension n'aurait pas été oublié ?
Les servos fonctionnent en 6V (sauf exception). La batterie fait 7.4V (en réalité, elle peut même monter jusqu'à 8V). Il ne faut pas donner trop de tension aux servomoteurs.
Les servos sont reliés à la carte qui est montrée dans le lien. Cette carte est alimentée en courant via les deux bornes bleues. Si la batterie est directement branchée à ces bornes, alors ça ne va pas, car il y aura une tension de 7.4 V au lieu de 6V, ce qui peut provoquer des comportements anormaux, et ce qui peut griller les servos. Il faut mettre un module abaisseur de tension, ou régulateur de tension entre la batterie et les bornes. S'il y a en a un, quelle est sa marque et quel est son modèle ? Il faut qu'il soit réglé pour donner les bonnes valeurs de tension et qu'il puisse fournir suffisamment de courant.
Enfin, le problème peut venir aussi de servos qui seraient endommagés. Dans ce cas, il peut arriver qu'ils marchent bien sans charge et qu'ils se mettent à ne plus fonctionner ou à avoir un comportement bizarre avec une charge à déplacer.
#56174 [C++]SerialPort Visual C++ 2010 Express
Posté par
sur 16 mai 2013 - 12:58
dans
Programmation
Pour récupérer les données, c'est presque comme l'écriture, sauf qu'il y a un read au lieu d'un write.
Voir la doc du C++.
Voir la doc du C++.




