
Ce n'est pas génant, et peut-être même mieux pour le Té (selon le sens)...

76 réponses à ce sujet
#21

levend
-

- Membres
-

- 5â¯688 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 06 novembre 2015 - 09:49
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#22
Microrupteurman
-

- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 06 novembre 2015 - 11:08
Pour les T c'est même pas la peine d'essayer je pense.
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !

#24
Ethan66
-
- Membres
- 111 messages
Membre
- Gender:Male
- Location:Perpignan
- Interests:Robot d'exploration et autres
Posté 07 novembre 2015 - 08:57
Microrupteur , il existe 2 types de T , les T dit droit et les pieds de biche qui guident le flux de liquide , quoi qu'il en soit , je ne suis pas sur que le systeme chenillé soit le plus intéréssant car il limiterai la manoeuvrabilité au profit de la traction
http://boutique.3sigma.fr/48-support-pantilt.htmlDans ce style la mais avec un peu de longueur pour que la manoeuvre soit plus fluide et moins cassée pour éviter de rester coincé au milieu d'un coude
On va donc partir sur un système a 2 module , un module de propulsion et un module de débouchage
Le module de propulsion assurera la partie marche avant-arriere (1/4 de la taille totale ? )
Le module de débouchage quand a lui devra être équipé d'un camera avec un eclairage ainsi de la queue de cochon et avec le systeme de direction sur ses deux roues avant ( 3/4 restant ? )
Au delà du possible
#25
sky99
-

- Membres
-
- 271 messages
Habitué
- Gender:Male
Posté 08 novembre 2015 - 12:50
Bonjour, je dis ça comme ça, mais ne serait il pas possible d'envisager un autre mode de déplacement?
On peut penser à un robot utilisant une sorte de reptation.
Il s'agirait d'avoir une sorte de bras, articulé, un peu comme un bras robot, mais avec davantage de segments.
une forme un peu comme ceci : |\/\/\/\/\/|
Chaque section contient un servomoteur assez costaud, et l'ensemble peut donc se plier en accordéon ou se déployer pour gagner en longueur.
Les sections terminales quand à elles comportent des patins qui permettent au robot de s'appuyer sur les parois du tube.
On imagine par exemple un servomoteur qui "pousse" deux patins perpendiculairement vers les bords, et par pression, cale le "pied" du robot.
Donc au départ, le robot cale son pied arrière sur la paroi du tube.
le corps s'étend, et ainsi il s'allonge. Il cale alors son pied avant vers les parois, de la même façon, et libère son pied arrière.
Il se contracte, et l'avant étant fixé, l'arrière se déplace.
On libère alors le pied avant, on cale le pied arrière, et on recommence.
Avec une conception adaptée du pied avant, on peut alors pousser les "trucs" dans la canalisation en avançant à chaque fois.
Pour les coudes, il suffit d'un bon algorithme pour que le corps tourne pendant la poussée (donc une poussée asymétrique sur chaque servo pour faire l'angle).
Le système de "pieds" peut reprendre celui des tunneliers, qui ont des pistons qui poussent vers les parois quand ceux ci placent les bords en béton après le forage:
(o) fermé devient : (--o--) en ouvert. Idéalement, un système à trois points serait plus efficace, mais pas facile a dessiner en asci art ^^
j'essaie quand même :
^
o
( )
devient :
^
|
o
/ \
( )
Bon, le dessin est pas top, mais avec des angles de 120°, vous imaginez l'idée.
Mon site principal : http://www.nagashur.com/ (format blog, un wiki y est aussi)
Mon profil sur hackaday.io : https://hackaday.io/sky99 (hackerspace en anglais, j'y ai plein de projets)
Mon Github : https://github.com/sarinkhan/
#26
levend
-
- Membres
-
- 5â¯688 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 08 novembre 2015 - 03:10
Bah, il n'y a pas assez de reptiles balancés dans les canalisations, sky99 veux balancé des reptiles mécaniques  .
.
L'idée n'est pas si mauvaise que ça, peut-être un peu plus difficile à gérer, mais avec un bon algorithme ça devrait le faire
Ces sales bestioles : https://www.google.f...q=robot serpent .
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#27
Ethan66
-
- Membres
- 111 messages
Membre
- Gender:Male
- Location:Perpignan
- Interests:Robot d'exploration et autres
Posté 08 novembre 2015 - 08:54
L'idée me semble intéressante mais super complexe aux vues des dimensions réduites de l'engin , il doit passer dans une canalisation de 100mm de diamètre et pouvoir passer des coudes et autres Tes ... J'ai peur que le système reptilien soit compliqué a mettre en place pour un débutant comme moi qui n'a jamais passer une ligne de code ni conçu aucune carte électronique
Au delà du possible
#28
Ethan66
-
- Membres
- 111 messages
Membre
- Gender:Male
- Location:Perpignan
- Interests:Robot d'exploration et autres
Posté 08 novembre 2015 - 08:57
Le serpent en question a bien la camera ainsi que la lumière mais il doit être filoguide et aussi muni d'un porte accessoire motorisé pour pouvoir effectuer les opérations de débouchages
Au delà du possible
#29
levend
-
- Membres
-
- 5â¯688 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 08 novembre 2015 - 01:30
A mon avis, c'est vrai que c'est assez complexe même si tu n'es pas obligé de le faire long.
après, la tête tu peux l'équiper comme tu veux, le tout, c'est qu'elle soit assez stable pour déboucher les canalisations.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#30
Ethan66
-
- Membres
- 111 messages
Membre
- Gender:Male
- Location:Perpignan
- Interests:Robot d'exploration et autres
Posté 08 novembre 2015 - 01:41
Je pense rester sur un premier prototype à roues sur 2 wagons avec chacun une petite propulsion et la direction a l'avant avec un systeme soit pan/tilt soit systeme de rotule en trois point avec un en position centrale sans risque de mise en porte feuille car chaque wagon aura sa propulsion indépendante , je vais préparer un plan tout bête sur paint ou un truc du genre pour donner une base de travail
Au delà du possible
#31
Ethan66
-
- Membres
- 111 messages
Membre
- Gender:Male
- Location:Perpignan
- Interests:Robot d'exploration et autres
Posté 09 novembre 2015 - 10:55
J'ai trouvé une solution pour l'outil de destruction des dechets :
Enroulée en spirale et traversée par un axe pour la maintenir en place et la faire tourner grâce a un moteur a haute vitesse ou au grand couple ? , le poids resterait raisonnable pour une efficacité de destruction non negligeable ,
Des idées pour une camera compacte et étanche ?
Au delà du possible
#32
Ethan66
-
- Membres
- 111 messages
Membre
- Gender:Male
- Location:Perpignan
- Interests:Robot d'exploration et autres
Posté 09 novembre 2015 - 06:15
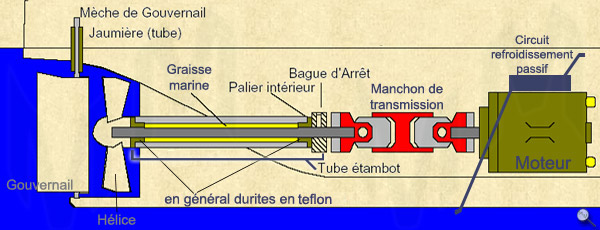
Accesoirement , l'engin doit être étanche a l'immersion complete car les canalisation bouchée sont 99% du temps , pleine d'eau !
Edit : http://nsa19.casimages.com/img/2010/12/05/101205032108266092.gif Ce systeme la permettrai déjà de proteger le moteur de debouchage
Edit 2 le retour : http://www.mini-modelisme.newocx.com/images/Transmission-bateaux-RC.jpg
Au delà du possible
#33
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 09 novembre 2015 - 06:35
Je dis non pour la lame de scie a ruban : c'est trop moue.
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#34
Ethan66
-
- Membres
- 111 messages
Membre
- Gender:Male
- Location:Perpignan
- Interests:Robot d'exploration et autres
Posté 09 novembre 2015 - 06:49
Même maintenue en 2 ou 4 points ?
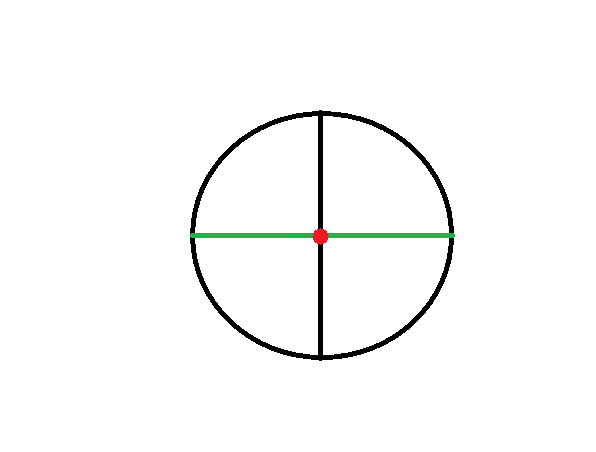
L'axe noir fait 2 points de fixations et l'axe vert en fait 2 de plus , quand a l'axe rouge , il est relié au moteur via un reducteur pour s'adapter dessus , malgré tout ça , ce serait trop mou ?!
Au delà du possible
#35
Ethan66
-
- Membres
- 111 messages
Membre
- Gender:Male
- Location:Perpignan
- Interests:Robot d'exploration et autres
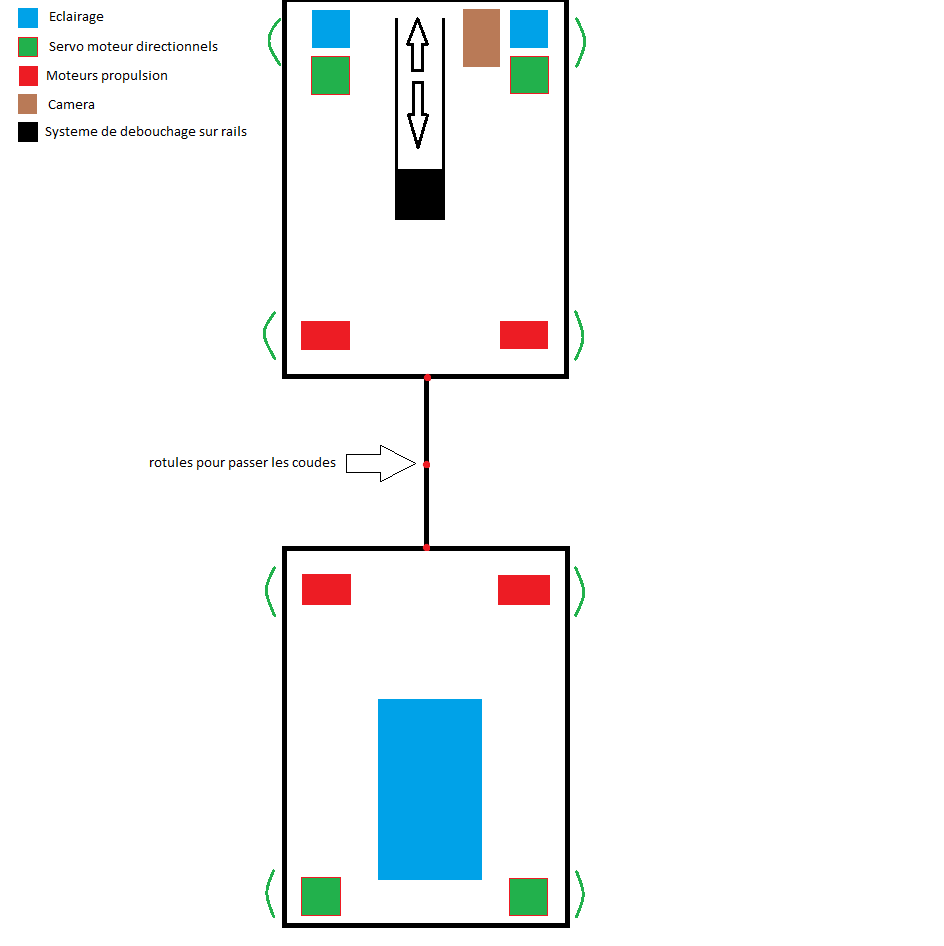
Posté 11 novembre 2015 - 11:16
Voici le premier plan fait sur paint , je ne sais pas manier d'autre logiciel de création ( si on considère bien sur que paint en est un ... )
Au delà du possible
#37
levend
-
- Membres
-
- 5â¯688 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 11 novembre 2015 - 08:04
Et encore, ce n'est même pas utile : tu pilotes les roues arrières séparément et tu peux diriger ton robot comme ça.
Edit : J'avais pas vu que tu avais aussi des roues motrices et des roues directionnelles sur le module arrière 
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#38
Ethan66
-
- Membres
- 111 messages
Membre
- Gender:Male
- Location:Perpignan
- Interests:Robot d'exploration et autres
Posté 11 novembre 2015 - 08:37
Et oui , mes deux modules sont dirigés et propulsés , il serait bon de savoir si je dirige les deux modules simultanément ou indépendamment !
Est-il possible d'avoir un indicateur de position zéro ( en ligne droite ) comme le point mort d'une moto , pour éviter de progresser en crabe ou de me coincer bêtement ...
Est-il possible d'avoir un indicateur de position zéro ( en ligne droite ) comme le point mort d'une moto , pour éviter de progresser en crabe ou de me coincer bêtement ...
Au delà du possible
#39
levend
-
- Membres
-
- 5â¯688 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 11 novembre 2015 - 08:43
Si tu utilises un servo pour diriger les roues, tu peux facilement le mettre au "neutre", puisque la position de ton servo est déterminée par le signal pwm que tu lui envoies.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users





{kind=link}
{kind=link}