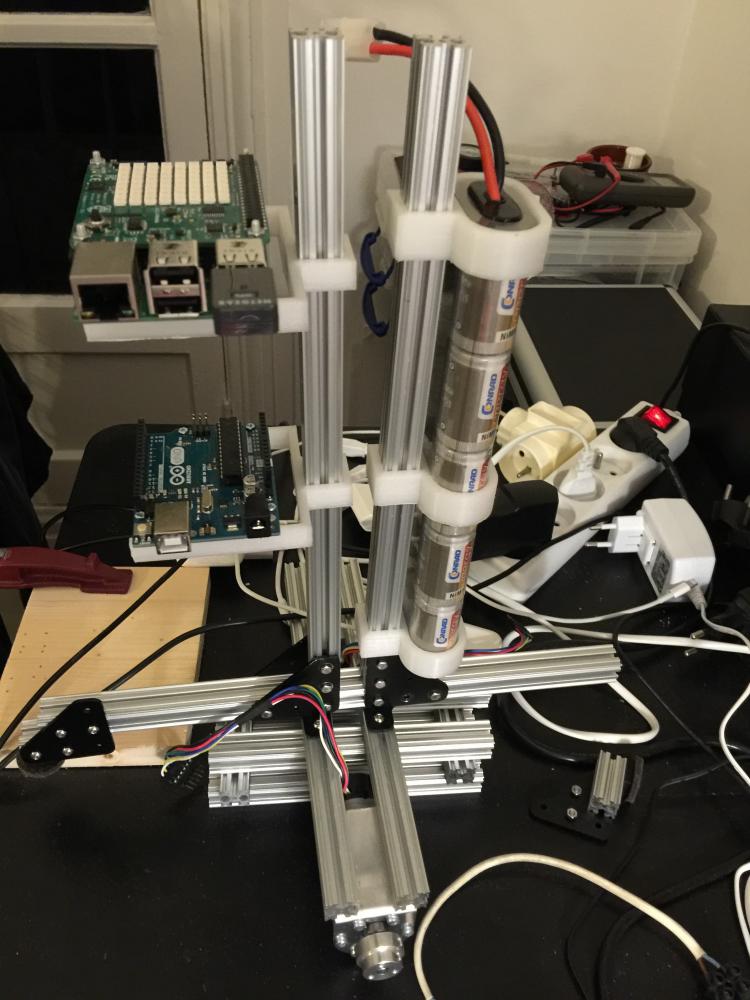
Quelques nouvelles de Ash. J'entame la V5. 5 pour sa version mécanique. Cette version est toujours basée sur des profilés en alu et profite de composants imprimés avec la discovery 200 (pour laquelle je croise les doigts). J'ai présenté partiellement son logiciel avec le tuto sur nodeJS. Mais voilà. J'ai changé de job au 1er aout. Je dois consacrer plus de temps à ce job qu'à mon hobby. Pour le moment. Cela explique pourquoi je suis moins dessus en ce moment. Je lâche pas le morceau pour autant.
J'ai autorisé Bob à se servir des yeux de Ash (le capteur US) puisqu'il en avait plus besoin. Et surtout parce que je vais me concentrer sur la capacité de Ash à se tenir debout, avec ou sans charge, posée aléatoirement. Donc exit la detection de son environnement pour le moment. Il doit apprendre à détecter son axe vertical avec les roues codeuses et son capteur IMU. J'ai de la matière encore inexploitée pour cela dans les précédents posts. Il conserve son raspberry et son aduino. L'arduino a la responsabilité de compter les roues codeurs et de piloter le pont en H des moteurs. Le raspberry lui est responsable des commandes via une interface web, de recevoir les infos de l'IMU et du calcul des différents PID.
Je vous tiens au courant.











 Trop de taf ... Dans un sens je ne vais pas m'en plaindre. Mais le pauvre Ash est en morceau depuis bien longtemps. Il me fait de la peine.
Trop de taf ... Dans un sens je ne vais pas m'en plaindre. Mais le pauvre Ash est en morceau depuis bien longtemps. Il me fait de la peine. 














