
Ok je vois le problème cela sera corrigé bientôt ! =)

124 réponses à ce sujet
#61

Mike118
-

- Administrateur
-

- 10â¯326 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 16 février 2018 - 10:14
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#63
Nulentout
-

- Membres
- 82 messages
Membre
- Gender:Male
Posté 01 mars 2018 - 12:06
Bonjour les amis,
Pratiquement un mois que je n’ai plus donné de nouvelles, et vous avez le droit d’imaginer que le projet de la petite sonde stagne.
Rassurez-vous, il n’en est rien, je viens donc vous donner quelques petits renseignements.
Je n’étais pas à mon domicile durant presque trois semaines ce qui explique mon silence. Rien de grave, bien au contraire. Mais j’ai de ce fait négligé de passer sur le forum.
Le projet évolue de façon "linéaire" et je peux vous affirmer que la version "pilotage par petit pupitre de commande" est incontestablement un pas en avant considérable sur le plan de l’agrément et de la convivialité d’utilisation. Plus la peine de retenir des codes. Le petit clavier à 16 touches sera présenté pour une utilisation "naturelle". Un codeur rotatif fait défiler à convenance des menus "bavards". Il suffit de consulter l’écran et l’on sait exactement dans quel domaine d’exploitation on explore les items. Par ailleurs, l’écran graphique ouvre des perspectives de présentation vraiment très agréables.
Le pris à payer, c’est le temps de programmation, car je dois mener de front deux programmes : Celui de la Sonde et celui du pupitre. En effet, le logiciel Esclave est complètement à reconditionner, ce qui revient globalement à entièrement le réécrire. Par ailleurs, maintenant les deux entités dialoguent directement, avec à la clef de sérieux problème pour ne jamais risquer de perdre la synchronisation des échanges de données.
Bon, vous avez compris que c’est long … mais ça avance de façon "nominale".
C’est fait, les deux logiciels sont globalement achevés, je vais pouvoir reprendre l’écriture du didacticiel. Pour la raquette de commande j’avais envisagé un Tome 5, mais vu la quantité d’informations à développer, sans compter la réalisation du pupitre proprement dit, je crois qu’il faudra au moins deux ouvrages, voir trois !
Pour vous donner une idée, voici l’écran qui simule un tableau de bord avec affichage en permanence des données de navigation. :
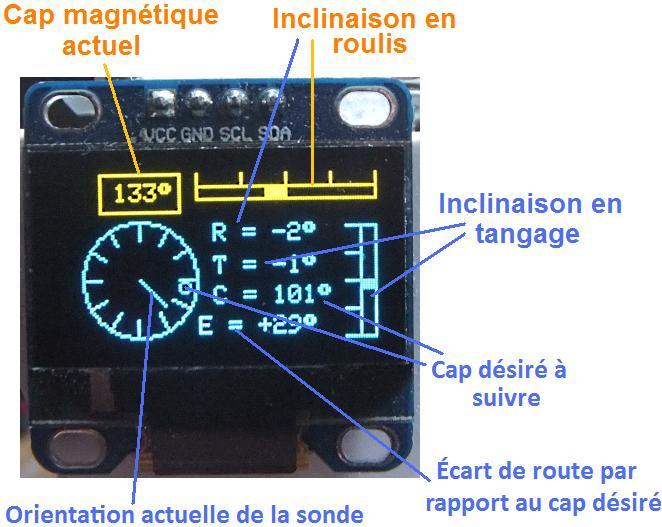
Quand on bouge la sonde, les diverses données sont mises à jour et le rayon orientation tourne sur la "rose des caps".
Bon, sur ces quelques nouvelles, je vais commencer à rédiger les pages internet du Tome 4, ensuite je passerai à la rédaction du TOME 5 …
Amicalement : Nulentout.
P.S : Ne vous posez pas de question sur la valeur de l'écart de route qui n'est pas précise, c'est une ancienne photographie qui prenait en référence le gyroscope ... qui comme vous le verrez dans le didacticiel dérive car il est influencé par la rotation terrestre.
#64
Mike118
-
- Administrateur
-
- 10â¯326 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 02 mars 2018 - 11:07
Bon nulentout à fini de mettre le tome 4 ... Il me donne donc du boulot ... Je m'y atèle bientôt ! ( Mais j'ai un autre ouvrage à travailler avant ! Depuis le temps que je le promet à Jekert, ( pas la sonde bien entendu ^^ ) faut vraiement que je m'y mette!
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#65
Nulentout
-
- Membres
- 82 messages
Membre
- Gender:Male
Posté 06 mars 2018 - 09:00
Bonjour les amies et les amis,
C’est fait, j’ai rédigé le TOME 5 qui commence à décrire les procédures d’utilisation du pupitre de commande et des écrans affichés sur le petit module graphique.
Mon logiciel de Pagination Assistée par Ordinateur refuse de travailler sur un fichier plus volumineux. Aussi, pour décrire la raquette de commande je vais devoir rédiger deux tomes.
Comme je sais que Mike118 est très sollicité et qu’il n’aura certainement pas la possibilité de mettre rapidement en ligne le TOME 4, (Ce qui m’empêche de créer les pages Web du tome 5.) pour celles et ceux qui ont envie de voir rapidement la suite, vous avez l’intégralité des fichiers du TOME 5 sur le lien suivant :
* Sonde JEKERT TOME5.zip :
Direct : http://www.mediafire.com/file/np2o83o8n8bcj6n/Sonde_JEKERT_TOME_5.zip
Je résume en deux mots : BONNE LECTURE à toutes et à tous.
Amicalement : Nulentout
#66
Nulentout
-
- Membres
- 82 messages
Membre
- Gender:Male
Posté 16 avril 2018 - 10:57
Bonjour les amis(es),
Nom d’une sonde spatiale ça fait une orbite vénusienne que je n’ai pas donné de nouvelles, Uranie, que le temps passe vite !
C’est avec plaisir que je viens vous parler du projet. Bonne nouvelle, le TOME 6 est terminé et disponible provisoirement sur :
http://www.mediafire.com/file/rnqtr70l0uds3zx/Sonde_JEKERT_TOME_6.zip
provisoirement, car je dois attendre que notre Ami MIKE128 puisse trouver le temps nécessaire pour mettre en ligne le tome 5 ce qui me permettra alors de rédiger les pages virtuelle du TOME 6 pour leur mise en ligne sur notre site favoris.
La version «pilotage par petit pupitre de commande» est aboutie, et la mise en œuvre de la sonde JEKERT par son entremise est particulièrement agréable. Pour celles et ceux qui sont pressés de tester le logiciel de la raquette, vous trouverez dans le fichier.ZIP du TOME 6 tous les programmes pour expérimenter à votre guise, associés naturellement au didacticiel.
Surtout, est livré dans ce dernier volet de la saga un petit manuel d’utilisation au format A5 que je vous invite fortement à imprimer. La façon de le réaliser est explicitée en page 54 du tutoriel. Ce petit livret aux dimensions réduites résume tout ce dont on peut avoir besoin pour piloter la petite machine.
Reste que pour le moment, le pupitre se résume ici à une « tignasse » de fils électrique réunissant les composants électroniques. Le total fonctionne correctement, mais les deux microcontrôleurs sont alimentés par les lignes USB du P.C. Pour l’autonomie … ce n’est pas terrible !
Le TOME 7 est prévu pour décrire en détails la réalisation électrique, électronique et matérielle du pupitre. Ce sera probablement assez long, car il me faut étudier les dessins des circuits imprimés et j’avoue que celui du clavier me fait un peu peur, car à priori ce n’est pas évident.
Je vous souhaite à toutes et à tous une bonne lecture, et des expérimentations agréables.
Et voui cher MIKE 128, l’année 2018 continue tragiquement … tu vas devoir y laisser non seulement tes nuits, mais aussi toutes tes journées ouvrables et fermables !
Bon, sur ces quelques nouvelles, je vais me faire un peu oublier et me consacrer à la réalisation du pupitre. La belle saison arrive, et c’est important car la concrétisation du coffret est assujettie à une température clémente dans mon atelier, ce qui exclut la saison froide. Il faut par conséquent que tout soit terminé avant le prochain hiver …
Amicalement : Nulentout.
#67
Mike118
-
- Administrateur
-
- 10â¯326 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 16 avril 2018 - 08:42
Mon pseudo à pris un upgrade ? =) Je vais bientôt me mettre à publier les tomes =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!

#69
Oracid
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 27 mai 2018 - 06:47
Coucou Nulentout. J'ai entrepris de lire ton très intéressant ouvrage dans le détail.
Sur cette page, http://www.robot-maker.com/ouvrages/14092017-reception-multiplexeur-pilotage-moteurs/
tu indiques avec plusieurs exemple comment positionner un servo :
"Par exemple pwm.setPWM(12, 0, 465); va immédiatement engendrer sur la sortie 12 le signal qui va par la ligne 9 au servomoteur B. La durée de l’impulsion à l’état « 1 » sera de 2272µS et la fréquence du signal de 50Hz. (2271µS = 465 x 4,884)"
Petite question. A quoi correspond la constante 4,884 ?
Sur cette page, http://www.robot-maker.com/ouvrages/14092017-reception-multiplexeur-pilotage-moteurs/
tu indiques avec plusieurs exemple comment positionner un servo :
"Par exemple pwm.setPWM(12, 0, 465); va immédiatement engendrer sur la sortie 12 le signal qui va par la ligne 9 au servomoteur B. La durée de l’impulsion à l’état « 1 » sera de 2272µS et la fréquence du signal de 50Hz. (2271µS = 465 x 4,884)"
Petite question. A quoi correspond la constante 4,884 ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#70
Nulentout
-
- Membres
- 82 messages
Membre
- Gender:Male
Posté 04 juin 2018 - 05:29
Bonjour les copains, bonjour Oracid,
Désolé de ne pas t’avoir répondu plus rapidement, mais il y a environ 15 jours le HD principal de mon ordinateur a scrachhhhhé. Étant sous WINDOWS VISTA tout réinstaller confine à une galère sans nom. Bon, actuellement j’ai réussi à réimplanter mes logiciels principaux et en particulier Internet. Je peux donc lire ma B.L. et répondre aux copains.
Pour répondre à ta question, j’ai consulté la documentation 16-channel-pwm-servo-driver.pdf car probablement c’est cette dernière qui permet de définir ce coefficient. Il se trouve que ma version actuelle d’Acrobat Reader ne peut pas lire tous les contenus et certaines pages restent blanches. Du coup, je ne peux pas répondre avec précision.
Si j’arrive à corriger mon lecteur de fichiers PDF je pousserai plus avant mon analyse. Ceci dit, pour mettre à jour les logiciels avec VISTA c’est la croix et la bannière.
Amicalement : Nulentout.
#71
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 04 juin 2018 - 06:25
Pas de soucis, je patienterai, d'autant que je pars en vacances vendredi, jusqu'à la fin du mois.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#72
Jordan
-

- Membres
- 21 messages
Nouveau membre
Posté 25 juin 2018 - 01:16
Bonjour,
Mon fils est fan des Robots et j'ai entrepris de faire cette sonde martienne...
tout d'abord un grand merci pour votre ouverture et le fait de partager votre savoir de cette manière.
pour votre bonne information
-nous avons acheté le kit complet sur le site mais nous sommes coincés
- le corps et les servo moteurs de la sonde sont montés
-mais je ne sais pas comment monté les cartes par rapport au multiplexeur... je ne vois pas comment l'alimenter
pourriez-vous me guidé pas pas pour cette partie de la réalisation...
ensuite j'aurai besoin de votre aide pour savoir comment faire bouger ce Robot...
j'espère que cela ne fait pas trop pour vous de revenir à des conseils aussi basiques...
merci d'avance
Jordan
#73
Mike118
-
- Administrateur
-
- 10â¯326 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 25 juin 2018 - 01:48
Bonjour avez vous suivi l'ouvrage de nulentout ?
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#74
Jordan
-
- Membres
- 21 messages
Nouveau membre
Posté 25 juin 2018 - 02:18
oui j'ai suivi l'ouvrage mais je vous avoue que par rapport à mes connaissances cela n'est pas très explicite par rapport aux connections à faire entre l'arduino Nano et les autres composants... j'ai besoin d'explication plus orienté photo et composants comme proposé sur le site...si possible
#75
Jordan
-
- Membres
- 21 messages
Nouveau membre
Posté 25 juin 2018 - 03:21
est ce possible d'avoir une photo du test de Jekert avec le detail de ses connections sur les composants et comment il s'y prend pour le faire. j'ai bien suivi son tuto et d'après moi il manque un peu d'info à ce niveau.
ensuite si on peut me guider sur la mise en route du programme etc cela peut -être très utile pour un novice.
j'espère ne pas en demander de trop...
jordan
#76
Mike118
-
- Administrateur
-
- 10â¯326 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 25 juin 2018 - 03:53
avez vous suivi ce test : test du driver pour servo ?
Avant de vouloir faire fonctionner le quadrupède au complet il me semble important de maîtriser les différentes parties =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#77
Jordan
-
- Membres
- 21 messages
Nouveau membre
Posté 25 juin 2018 - 04:29
Super merci pour la réponse c'est un bon début ...
il me manque
-ou se trouve le programme à télécharger comment commande t'on le programme du PC vers la carte...
- la gestion de l'alimentation quand et comment rajoute-t-on de la puissance au système...
Il semble que pour ce test quand il n'y a qu'un seul servo moteur il n'y a pas besoin d'alimentation extérieur? (est- ce juste?)
merci d'avance
bonne soirée
#78
Mike118
-
- Administrateur
-
- 10â¯326 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 25 juin 2018 - 04:44
Super merci pour la réponse c'est un bon début ...
Il semble que pour ce test quand il n'y a qu'un seul servo moteur il n'y a pas besoin d'alimentation extérieur? (est- ce juste?)
Oui c'est juste, pour un seul servomoteur l'alimentation par l'usb suffit. Par contre il faudra relier le 5V sur la ligne des servo moteur ... 5V arduino et V+ carte driver.
Pour le reste je ne peux que vous inviter à lire ce qui est déjà écrit dans le sujet du test...
Les différents code à copier coller pour apprendre à utiliser le driver sont disponible directement dans les tests...
Après si cela peut vous aider il y a ce schémas que j'ai réalisé pour un bipède :
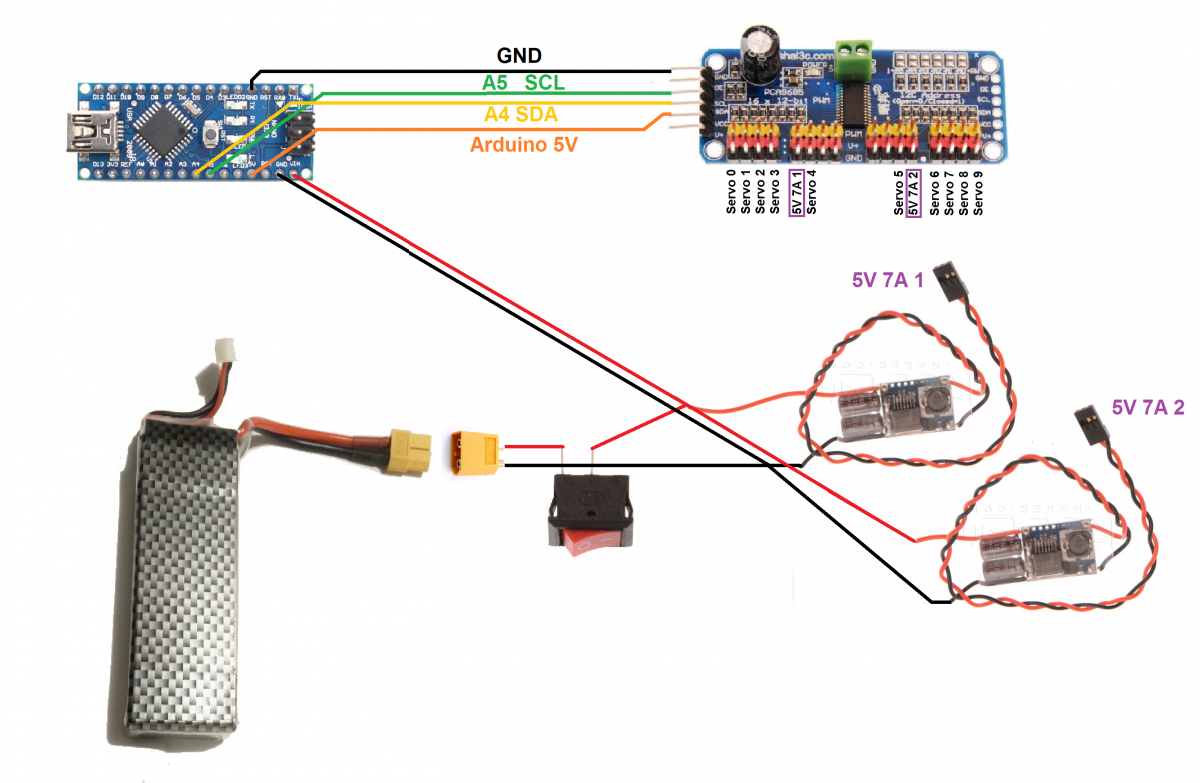
Schémas pour le bipède avec deux convertisseur 5V, mais pour le quadrupède avec les servo 9G un seul convertisseur suffit.
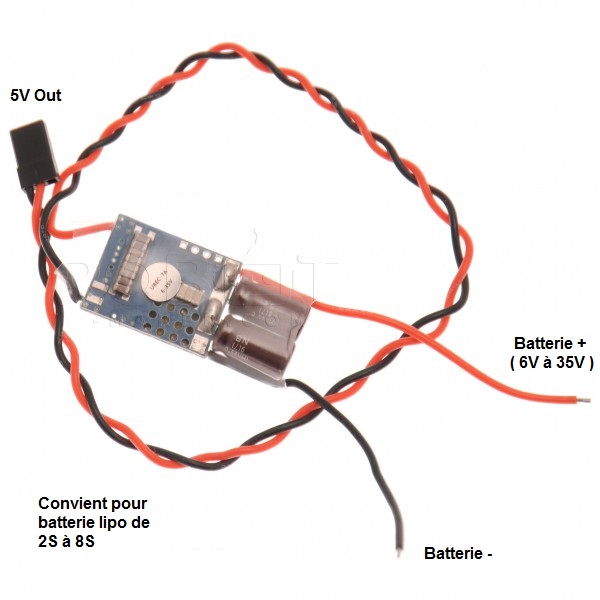
Le convertisseur 5V qui permet de donner du jus au robot
Pour plus d'info sur le bipède : Briel code de test, câblage etc...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#80
Jordan
-
- Membres
- 21 messages
Nouveau membre
Posté 26 juin 2018 - 03:37
merci il ne me manque que deux choses
- dans le kit que j'ai recu(comme il était conseillé sur le site) il n'y a pas de fer a souder: emboitant les connections cela est-til suffisant?
- comment fait t-on pour charger le programme de base et le connecter le PC à la carte: il y a t-il un tuto à ce sujet?
Merci d'avance pour vos réponses
Jordan
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

