TroisiÃĻme maillon dans la chaÃŪne matÃĐrielle qui animera JEKERT, le module de multiplexage intervient dans l’interface entre l’ordinateur de bord NANO Arduino et les entrÃĐes de pilotage des moteurs. Cette platine ÃĐlectronique est fondamentale. Elle autorise l’envoi de consignes jusqu’à seize moteurs indÃĐpendants en ne 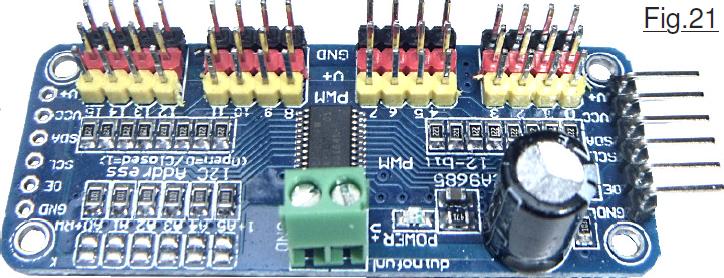 monopolisant que deux broches analogiques par ÃĐmulation d’une ligne sÃĐrie au standard I2C. Par ailleurs, ce module ÃĐlectronique nous affranchit d’avoir à gÃĐnÃĐrer les seize signaux à 50Hz, avec des rapports cycliques correspondant à la position dÃĐsirÃĐe pour chaque moteur. Le comportement parfait de cette ÃĐlectronique est vital, sans compter le fait que pour la programmation nous devons nous montrer capables de le maitriser pour dÃĐvelopper le logiciel. ParticuliÃĻrement compact, ce module prÃĐsentÃĐ sur la Fig.21 peut Être chaÃŪnÃĐ avec d’autres compÃĻres si l’on dÃĐsire plus de moteurs sur la machine envisagÃĐe. Avec seulement douze degrÃĐs de mobilitÃĐ sur JEKERT ce ne sera pas nÃĐcessaire.
monopolisant que deux broches analogiques par ÃĐmulation d’une ligne sÃĐrie au standard I2C. Par ailleurs, ce module ÃĐlectronique nous affranchit d’avoir à gÃĐnÃĐrer les seize signaux à 50Hz, avec des rapports cycliques correspondant à la position dÃĐsirÃĐe pour chaque moteur. Le comportement parfait de cette ÃĐlectronique est vital, sans compter le fait que pour la programmation nous devons nous montrer capables de le maitriser pour dÃĐvelopper le logiciel. ParticuliÃĻrement compact, ce module prÃĐsentÃĐ sur la Fig.21 peut Être chaÃŪnÃĐ avec d’autres compÃĻres si l’on dÃĐsire plus de moteurs sur la machine envisagÃĐe. Avec seulement douze degrÃĐs de mobilitÃĐ sur JEKERT ce ne sera pas nÃĐcessaire.
Les signaux à fournir à la motorisation.
Pour dÃĐterminer les caractÃĐristiques des moteurs qui sont à notre disposition, nous nous sommes contentÃĐs de faire confiance au programme P01_Commande_Servo_par_Angles.ino et de tourner le bouton d’un potentiomÃĻtre. Peu importe le signal de commande qui ÃĐtait envoyÃĐ sur la ligne orange des asservissements. Nous ne sommes pas trÃĻs à l’aise, car le technicien qui a dÃĐballÃĐ le multiplexeur PCA9685 nous a tout de suite informÃĐ que la documentation qui l’accompagne n’est pas claire et nous a souhaitÃĐ bon courage. On va faire avec …
Ce jour, en revanche, on n’y coupe pas d’apprÃĐhender la façon de faire fonctionner les moteurs, car pour programmer le multiplexeur il nous sera indispensable de savoir ce que doivent gÃĐnÃĐrer les sorties 0 à 15 de ce dernier.
Donc, sur le bureau, on farfouille pour trouver la fiche nommÃĐe Pilotage des servomoteurs.
Outre la fonction de chacun des trois fils, on comprend finalement qu’il suffit pour chaque individu de lui envoyer en permanence en consigne un ÂŦ signal binaire carrÃĐ Âŧ à 50Hz dont on modulera la durÃĐe à l’ÃĐtat logique ÂŦ 1 Âŧ entre environ 1000ÂĩS et 2000ÂĩS. C’est exactement ce que devra faire le module de pilotage à seize canaux PCA9685 dÃĐveloppÃĐ par l’entreprise ADAFRUIT.
Ayant compris ce que devra gÃĐnÃĐrer ce circuit ÃĐlectronique, il nous reste à voir comment lui dÃĐlivrer par logiciel les consignes. Dans ce but, on ne montre pas notre malaise au technicien qui nous observe, et avec autoritÃĐ et assurance on saisit à son tour la Fiche n°4 nommÃĐe :
MÃĐthodes de la bibliothÃĻque Adafruit_PWMServoDriver.h.
L’entreprise ADAFRUIT commercialise toute une variÃĐtÃĐ de petits modules ÃĐlectroniques dÃĐdiÃĐs pour la famille Arduino. Pour inciter les clients potentiels à acheter ces produits, ils accompagnent leurs rÃĐfÃĐrences par des bibliothÃĻques bien pensÃĐes qui facilitent considÃĐrablement la programmation. Vous avez dÃĐduit que la fiche mentionnÃĐe ci-avant constitue un rÃĐsumÃĐ des fonctions fournies par la bibliothÃĻque associÃĐe directement au circuit PCA9685. Avant de dÃĐtailler le processus de pilotage, examinons l’architecture ÃĐlectronique de la carte PCA9685 :
Structure ÃĐlectronique du multiplexeur et ses branchements.
La Fig.22 rÃĐsume assez bien les branchements à effectuer et surtout la mission dont s’acquitte le module d’interfaçage. Ce dessin fait apparaÃŪtre les liaisons filaires ÃĐlectriques à ÃĐtablir. En 1 une petite alimentation alimente la carte Arduino NANO qui ne consomme qu’une ÃĐnergie dÃĐrisoire. (Ce peut Être la ligne sÃĐrie USB qui va au P.C. durant la programmation.) On utilise des fils de faible section. En 2 l’alimentation musclÃĐe en ÂŦ gros fils Âŧ 3 va directement au bornier. Logiquement en 4 il faudrait  ÃĐtablir un lien entre les deux masses de rÃĐfÃĐrence. Ce n’est pas indispensable, car en 7 la liaison est ÃĐtablie en interne sur la carte ÃĐlectronique. Notez au passage que les deux lignes de picots du bas pour la masse et pour le +5V de puissance sont rÃĐunies, comme sur le petit connecteur de la Fig.18 qui servait aux tests. Ainsi tous les moteurs branchÃĐs seront en parallÃĻle comme en 11 sur ces deux lignes d’alimentation. Enfin, chaque ligne orange d’un moteur va sur la sortie 0 à 15 de pilotage qui lui est rÃĐservÃĐe. L’ÃĐlectronique locale est alimentÃĐe par une ligne 5 à part qui logiquement sera reliÃĐe à celle de la carte Arduino. Passons à l’ÃĐtude des signaux ÃĐlectriques qui animent le total :
ÃĐtablir un lien entre les deux masses de rÃĐfÃĐrence. Ce n’est pas indispensable, car en 7 la liaison est ÃĐtablie en interne sur la carte ÃĐlectronique. Notez au passage que les deux lignes de picots du bas pour la masse et pour le +5V de puissance sont rÃĐunies, comme sur le petit connecteur de la Fig.18 qui servait aux tests. Ainsi tous les moteurs branchÃĐs seront en parallÃĻle comme en 11 sur ces deux lignes d’alimentation. Enfin, chaque ligne orange d’un moteur va sur la sortie 0 à 15 de pilotage qui lui est rÃĐservÃĐe. L’ÃĐlectronique locale est alimentÃĐe par une ligne 5 à part qui logiquement sera reliÃĐe à celle de la carte Arduino. Passons à l’ÃĐtude des signaux ÃĐlectriques qui animent le total :
Fonctionnement de la carte ÃĐlectronique PCA9685.
Lorsque le circuit n’a jamais reçu de consigne pour une ligne de sortie, cette derniÃĻre reste au repos à l’ÃĐtat logique ÂŦ 0 Âŧ. Avant de chercher à gÃĐnÃĐrer de la PWM sur les diverses sorties du module, on doit prÃĐciser la frÃĐquence de rÃĐpÃĐtition dÃĐsirÃĐe avec pwm.setPWMFreq(FrÃĐquence);
Comme on veut commander des servomoteurs l’instruction devient pwm.setPWMFreq(50); car la pÃĐriode T souhaitÃĐe est de 20mS. Cette consigne est envoyÃĐe sur la ligne I2C en 6 et respecte les protocoles du circuit intÃĐgrÃĐ soudÃĐ sur le circuit imprimÃĐ. Pour l’instant les seize sorties sont au repos. Pour commander un servomoteur, (Ou tout dispositif branchÃĐ sur le module.) on dÃĐsigne la sortie concernÃĐe et la durÃĐe de l’impulsion à l’ÃĐtat ÂŦ 1 Âŧ. C’est l’instruction de la bibliothÃĻque :
pwm.setPWM(Num_sortie, Ton, Toff); qui se charge de cette mission.
Par exemple pwm.setPWM(12, 0, 465); va immÃĐdiatement engendrer sur la sortie 12 le signal qui va par la ligne 9 au servomoteur B. La durÃĐe de l’impulsion à l’ÃĐtat ÂŦ 1 Âŧ sera de 2272ÂĩS et la frÃĐquence du signal de 50Hz. (2271ÂĩS = 465 x 4,884) Le moteur B adopte la position qui en dÃĐcoule. Il la conserve, car, bien que le signal de consigne en 6 ne dure qu’une fraction de seconde, à partir d’une commande de gÃĐnÃĐration PWM la sortie gÃĐnÃĐrera le signal dÃĐcoupÃĐ jusqu’à ce qu’une nouvelle consigne dÃĐsignant cette sortie soit envoyÃĐe. Si maintenant on active l’instruction suivante :
pwm.setPWM(15, 0, 137); c’est le moteur C qui sur la ligne 10 sera pilotÃĐ par un signal de frÃĐquence identique 50Hz la durÃĐe à l’ÃĐtat logique ÂŦ 1 Âŧ faisant cette fois 669ÂĩS. (669ÂĩS = 137 x 4,884) Le moteur C tourne rapidement et se positionne à son tour à l’angle de dÃĐviation correspondant à ce
rapport cyclique. Enfin, pour ne pas que le troisiÃĻme moteur ne reste dans une attitude quelconque, le programme rencontre pwm.setPWM(10, 0, 291); qui imposera un signal à 50Hz d’impulsion positive de 1421ÂĩS sur la ligne 8. (1421ÂĩS = 291 x 4,884)
Coupons toutes les alimentations. DÃĐbranchons les liaisons entre Arduino NANO et le multiplexeur. Puis rÃĐalimentons la carte ÃĐlectronique sans rebrancher les deux lignes de la liaison I2C. L’ensemble de la configuration est rÃĐtablie sur le multiplexeur qui conserve dans une mÃĐmoire non volatile le contexte qui est mÃĐmorisÃĐ. Ainsi les moteurs reprennent la mÊme position que celles qu’ils avaient avant la mise hors tension de l’ensemble.
PremiÃĻre mise en Åuvre de l’interface de motorisation.
Bien qu’initialement les informations fournies avec la bibliothÃĻque ÃĐtaient trop sommaires, divers essais sur le rÃĐel ont permis de dÃĐgager les grandes lignes qui sont consignÃĐes sur la fiche dÃĐdiÃĐe. Finalement la mise en service de cette petite merveille d’ÃĐlectronique ne sera pas bien compliquÃĐe. Elle va nous permettre de piloter chaque moteur indÃĐpendamment des autres. C’est un incontournable pour prÃĐtendre programmer à notre dÃĐsir la mobilitÃĐ de JEKERT.
 La rÃĐception des moteurs dans le chapitre n°2 a clairement fait apparaÃŪtre une dispersion de caractÃĐristique entre les divers individus. Hors, pas question lorsque la sonde sera posÃĐe sur Mars, de ÂŦ voir Âŧ un moteur passer en divergence. La mÃĐcanique irait en butÃĐe ce qui est formellement interdit, la ligne ÃĐlectrique tortillerait des nÅuds avant que tout ne se bloque. Aussi, il nous faudra programmer une subroutine de servitude qui pour chaque moteur cantonnera sa plage de rotation dans la fourchette 0° à 180°.
La rÃĐception des moteurs dans le chapitre n°2 a clairement fait apparaÃŪtre une dispersion de caractÃĐristique entre les divers individus. Hors, pas question lorsque la sonde sera posÃĐe sur Mars, de ÂŦ voir Âŧ un moteur passer en divergence. La mÃĐcanique irait en butÃĐe ce qui est formellement interdit, la ligne ÃĐlectrique tortillerait des nÅuds avant que tout ne se bloque. Aussi, il nous faudra programmer une subroutine de servitude qui pour chaque moteur cantonnera sa plage de rotation dans la fourchette 0° à 180°.
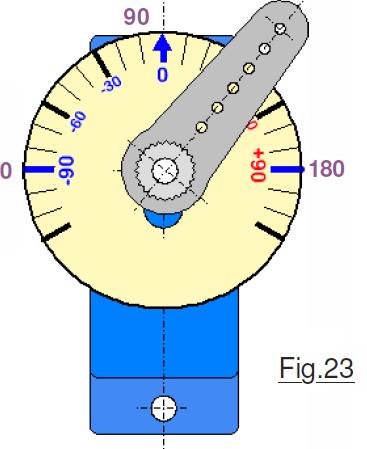
GÃĐnÃĐralement, comme indiquÃĐ en violet sur la Fig.23 les positions angulaires sont repÃĐrÃĐes entre 0 et 180° avec 90° pour la position centrale. C’est un arbitraire, du reste certains techniciens utilisent le sens inverse. Personnellement, la notion de ÂŦ neutre opÃĐrationnel Âŧ est prioritaire, raison pour laquelle je prÃĐfÃĻre adopter des positions repÃĐrÃĐes entre -90° et +90°, le neutre valant alors zÃĐro pour satisfaire ÂŦ mon arbitraire Âŧ. Chacun a sa logique propre, j’espÃĻre que la mienne ne vous choquera pas. Quand au signe, n’ayant à ce stade aucun critÃĻre spÃĐcial, j’adopte le moins à gauche et le plus à droite, comme pour des axes trirectangles cartÃĐsiens.
Ayant cernÃĐ le principe de fonctionnement du circuit PCA9685, c’est avec fiertÃĐ qu’en prÃĐsence des techniciens nous tÃĐlÃĐchargeons P02_Test_de_base_du_Multiplexeur.ino dans le cerveau du petit calculateur. Son comportement est rudimentaire et ressemble à celui de l’expÃĐrience dÃĐcrite sur la Fig.19 sauf que cette fois les commandes des moteurs ne sont plus branchÃĐes sur une sortie d’Arduino unique, mais pilotÃĐes sÃĐparÃĐment par les sorties individuelles du multiplexeur. Dans un premier temps on ne branchera qu’un seul moteur à la fois pour en dÃĐterminer les caractÃĐristiques pertinentes.
– Ben Totoche, tu perds ton temps, c’est dÃĐjà fait dans le chapitre 02, on a tout notÃĐ dans le beau tableau plein plein plein de nombres en couleurs !
– Et oui Dudule, c’est la vie du dÃĐveloppeur. Quand on a passÃĐ tout ce temps à rÃĐdiger ce tableau, nous ne savions pas encore quels seraient les paramÃĻtres pertinents … et ce ne sont pas les bons.
– Mince alors, quels sont les bons ? Faut tout recommencer ?
– Voui, tout à refaire, il nous faut connaitre les durÃĐes d’impulsions à fournir pour chaque moteur quand il se trouve exactement à -90° et +90°.

La suite est ici.