Étude dont on ne peut absolument pas faire l’économie, on va devoir examiner chaque possibilité, faire un choix et surtout le justifier, c’est à dire orienter la décision en fonction de critères techniques objectifs. S’il s’agissait de créer un petit robot ludique, uniquement pour se faire plaisir, on assemblerait fébrilement sans se poser de questions. Dans le spatial, l’improvisation est exclue du dictionnaire. Tout doit se voir OPTIMISÉ, c’est d’autant plus justifié que ça ne coutera que le salaire de deux ou trois ingénieurs sur disons trois à quatre jours. Des sommes dérisoires où les budgets habituels sont chiffrés en méga Euros. Aussi, avant d’avoir enfin le plaisir de prendre les clefs et les tournevis, on doit obligatoirement passer par la case CONCEPTION MÉCANIQUE.
Retour dans la salle S2, on distribue les études aux trois ingénieurs disponibles ce jour julien 58018. Les consignes sont claires concernant les critères à prendre en compte :
• Minimiser les efforts qui seront soumis aux paliers des moteurs et à leurs engrenages internes,
• Permettre la plus grande amplitude des mouvements élémentaires dans chaque articulation,
associées aux nombreuses postures qui seront envisagées en fonction des phases de la mission,
• Éliminer autant que possible les risques d’interférences matérielles dans la structure.
Justification du choix des palonniers.
Plusieurs principes généraux en mécanique dominent le monde de la conception. Pour aider à effectuer nos choix nous allons naturellement y faire appel, tout en tenant compte des consignes claires qui nous ont été imposées. Ces préceptes fondamentaux en conception mécanique sont résumés dans le petit encadré figurant à la fin de ce chapitre.
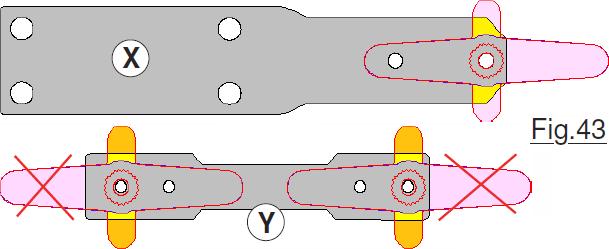 Considérons la Fig.43 en X qui représente le Fémur vu de dessus dans le cas d’une combinaison D extérieure. On constate que le fait de choisir un palonnier cruciforme augmente la surface de contact dans les proportions coloriées en jaune. La stabilité entre les deux éléments n’en sera que meilleur et le principe n°1 est satisfait. Pour le Tibia en Y on constate que le gain de surface en jaune est très faible au regard du dépassement des parties colorées en orange. On propose donc de privilégier le principe n°2. Par ailleurs les dépassements roses sont préjudiciables au principe n°2, donc on choisira des Palonniers Courts sur le Tibia.
Considérons la Fig.43 en X qui représente le Fémur vu de dessus dans le cas d’une combinaison D extérieure. On constate que le fait de choisir un palonnier cruciforme augmente la surface de contact dans les proportions coloriées en jaune. La stabilité entre les deux éléments n’en sera que meilleur et le principe n°1 est satisfait. Pour le Tibia en Y on constate que le gain de surface en jaune est très faible au regard du dépassement des parties colorées en orange. On propose donc de privilégier le principe n°2. Par ailleurs les dépassements roses sont préjudiciables au principe n°2, donc on choisira des Palonniers Courts sur le Tibia.
Certains d’entre vous vont certainement penser que dans ces choix nous sommes en présence de « gagne petit ». Soit, mais l’ennemi le plus dangereux d’un concepteur, c’est l’arbitraire. L’expérience séculaire montre que dans le domaine industriel « le hasard ne fait jamais bien les choses ». Il s’agit plus d’un mode de pensée d’autant plus justifié dans ces lignes, que l’on s’est proposé de pousser au maximum les analyses. Alors « gagne petit » ou non nous justifierons le maximum de choix envisagés. Par ailleurs, n’oublions pas que dans le monde industriel, ce sont les décisions qui sont prises tout au début d’un projet qui engagent le plus, c’est à dire celles qui auront les conséquences les plus pénalisantes si l’on s’est trompé. Autant dire qu’à ce stade il vaut mieux cogiter au mieux !

Propagation des efforts dans un mécanisme
Analyser la configuration à adopter pour les diverses liaisons mécaniques de notre machine devra forcément tenir compte de l’influence de l’option adoptée sur les efforts qui vont soumettre les éléments à des contraintes qu’il faudra chercher à minimiser. (Principe n°3.) Il nous faut impérativement comprendre comment les efforts se transmettent de pièce mécanique en pièce mécanique voisine. Pour cela, analysons la Fig.44 qui présente l’une des Jambes dans la pire configuration envisageable, c’est à dire quand elle est déployée « de tout son long. Il s’agit bien évidemment d’un cas extrême qui sera exclus des configurations en exploitation. En effet, dans cette posture la sonde reposera sur le bouclier. Il faudrait un rocher sur le coté particulièrement haut pour que la griffe porte dessus. Néanmoins pour les explications les effets sont « plus visuels » …
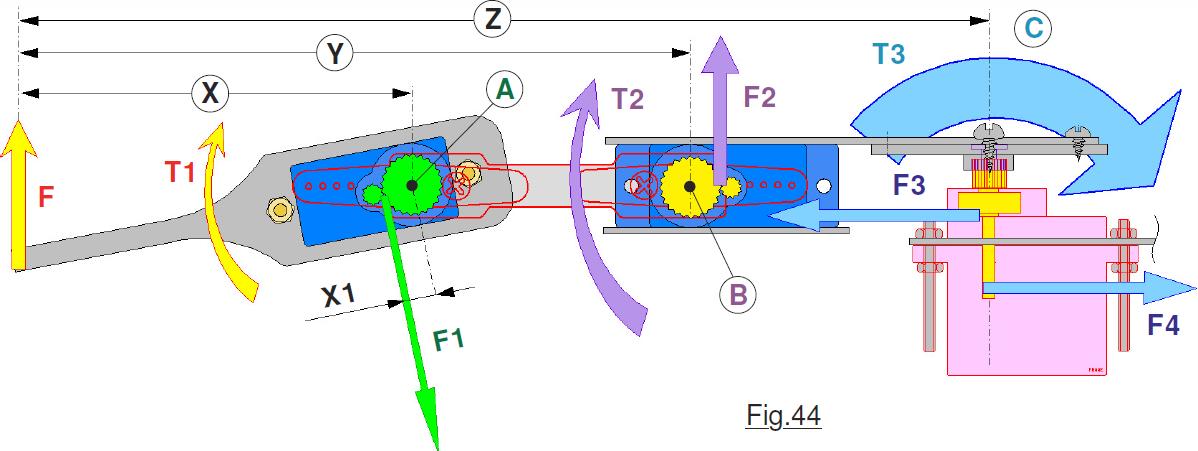 En F est représentée la poussée du sol sur la Griffe, effort qui correspond à environ la moitié ou le tiers du poids de la sonde. Par rapport à l’articulation A la tendance à faire tourner T1 est proportionnelles à la distance X. (Le « bras de levier ».) C’est l’effort exercé par le tout petit pignon F1 exercé dans l’engrenage vert qui s’oppose à T1. Comme le robot est au repos, on peut affirmer que les deux efforts contraires sont égaux en grandeur donc T1 = F * X = F1 * X1. On voit que X est environ 12 fois plus grand que X1. Donc l’effort dans l’engrenage est environ 12 fois plus grand que celui exercé par le sol sur la Griffe F.
En F est représentée la poussée du sol sur la Griffe, effort qui correspond à environ la moitié ou le tiers du poids de la sonde. Par rapport à l’articulation A la tendance à faire tourner T1 est proportionnelles à la distance X. (Le « bras de levier ».) C’est l’effort exercé par le tout petit pignon F1 exercé dans l’engrenage vert qui s’oppose à T1. Comme le robot est au repos, on peut affirmer que les deux efforts contraires sont égaux en grandeur donc T1 = F * X = F1 * X1. On voit que X est environ 12 fois plus grand que X1. Donc l’effort dans l’engrenage est environ 12 fois plus grand que celui exercé par le sol sur la Griffe F.
Pour l’articulation B le rapport est encore plus critique. La tendance à tourner T2 contrée par l’engrenage jaune est plus importante puisque le bras de levier Y pour le même effort F est plus long. Le rapport des bras de levier dans l’engrenage jaune est d’environ 24 à 25. L’effort dans la petite denture en matière plastique F2 est donc 24 fois plus grand que F. Si la configuration impose le tiers du poids en F, F2 devient égal à 8 fois le poids total de la sonde !
Ça se passe dans le petit moteur, et ce dernier souffre en silence. On ne s’en rend absolument pas compte, pourtant le phénomène est bien réel. Pour le moteur de la hanche en C le bras de levier Z est encore plus grand et la tendance à tourner T3 augmente dans les mêmes proportions.
Nous ne savons pas exactement comment l’arbre de sortie, enchâssé dans le corps du servomoteur est guidé. On peut affirmer toutefois que les efforts supportés par les deux paliers tels que F3 et F4 qui s’opposent à la rotation T3 seront pour le moins notables.
CONCLUSION : Les études de morphologie devront privilégier les configurations qui minimiseront les « bras de levier », c’est à dire des distances telles que X, Y et Z. Les postures relatives à différentes phases de la mission seront également construites en tenant compte de ce critère prioritaire.
Les déplacements seront étudiés de façon à ce que le poids soit réparti sur trois jambes, en évitant par exemple de lever simultanément deux membres opposés.
Justification de l’orientation « verticale » du Tibia. (Choix J.)
Franchement on pourrait laisser le hasard choisir et les orienter n’importe comment. La différence d’effet restera dérisoire et l’argumentation « faible ». Seule observation qui puisse conserver une certaine crédibilité : En observant la Fig.41 et compte tenu des explications sur la propagation des efforts, la zone A subira des contraintes plus élevées que la région B. N’ayant pas d’autres observations pertinentes à proposer, on placera la section la plus « résistante » vers le haut
dans la région du Genou.
 Sortie moteur châssis sur le Dessus. (Choix A.)
Sortie moteur châssis sur le Dessus. (Choix A.)
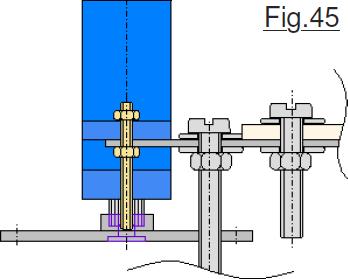
Sachant que sur ces articulations on a opté pour des palonniers cruciformes, le dessin de la Fig.45 montre immédiatement que lorsque le Fémur sera orienté vers l’avant ou vers l’arrière, il y aura interférence matérielle avec les boulons qui relient le bouclier de protection. Les moteurs seront situés dessous avec leur arbre de sortie orienté vers le haut.
Sortie moteur châssis Extérieur. (Choix C.)
Considérons la Fig.46 sur laquelle les deux options envisageables sont tracées. Sorties moteur situées vers l’intérieur en 1 les palonniers longs se superposeraient, on serait obligé de sélectionner des courts ce qui est contraire au choix effectué. En effet, il est facile de comprendre qu’avec les palonniers longs la portée P dans la liaison est plus grande favorisant le principe N°1. Par ailleurs, si l’on désirait adopter la semelle dessus comme le montre l’épure coloriée en rose pastel, en 2 la bride du moteur 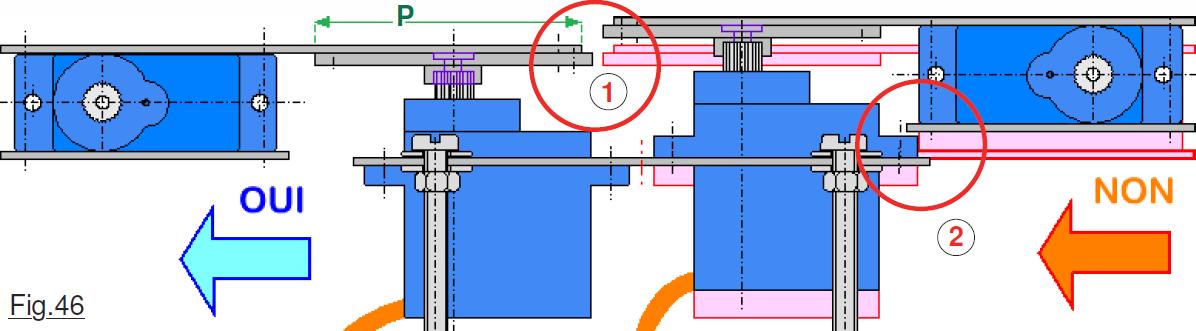 entrerait en interférence avec le châssis. Bien que nous n’ayons pas encore choisi pour la variable B ce serait une possibilité de moins. Deux inconvénients alors qu’il semble ne pas y avoir d’avantage : Les sorties des moteurs seront vers l’extérieur.
entrerait en interférence avec le châssis. Bien que nous n’ayons pas encore choisi pour la variable B ce serait une possibilité de moins. Deux inconvénients alors qu’il semble ne pas y avoir d’avantage : Les sorties des moteurs seront vers l’extérieur.
Justifier Moteur châssis Palonnier vers l’Intérieur. (Choix D.)
L’observation de la Fig.47 démontre à l’évidence que le « bras de levier » en Y est bien plus important que celui en X. Choisir un assemblage déporté vers l’extérieur augmenterait de façon notable les efforts dans les pièces mécaniques, et en particuliers ceux sur les paliers qui guident les arbres de sortie des hanches. Par ailleurs la surface de contact P mentionnée dans l’étude précédente serait réduite, facteur défavorable. C’est surtout Y > X qui constitue l’argument principal pour guider ce choix. Il ne faut toutefois pas oublier que les efforts subis par les pièces mécaniques ne constituent pas les seuls critères à prendre en compte. Nous devons simultanément étudier les postures particulières, la mobilité etc. Pour le cas en cours d’évaluation D on peut vérifier que dans les deux cas la griffe peut s’escamoter de façon équivalente avec pour avantage à la solution Intérieure un encombrement global très inférieur ce qui sera un avantage pour la posture de décollage.

Justifier Semelle moteur châssis sur le Dessus. (Choix B.)
Représentée sur la Fig.48 la sonde se trouve dans la posture particulière qui sera nommée « Posture stable raisonnable ». En A la semelle du moteur est sous le châssis alors qu’en B elle se trouve sur le dessus. La structure dans le cas B sera légèrement plus basse de la différence de 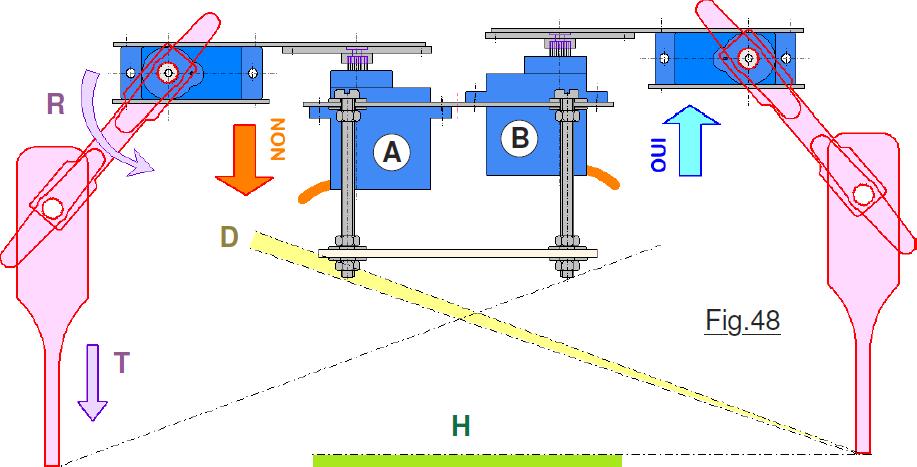 hauteur H. La garde au sol dans le cas B est donc légèrement plus faible, mais de toute façon lors du pilotage sur le terrain on évitera les gros rochers. Ce n’est pas très évident, mais l’inclinaison potentielle est légèrement plus grande pour A la différence étant toutefois minime et soulignée en D. Quand on cherchera à tester des marches d’escalier, la translation T obtenue par la rotation R sera légèrement plus faible pour B que pour A dans la marge H. Bien que la solution A semble cumuler plusieurs petits bénéfices, c’est la variante B qui est sélectionnée car elle confine à une posture légèrement plus stable puisque le centre de gravité est plus bas.
hauteur H. La garde au sol dans le cas B est donc légèrement plus faible, mais de toute façon lors du pilotage sur le terrain on évitera les gros rochers. Ce n’est pas très évident, mais l’inclinaison potentielle est légèrement plus grande pour A la différence étant toutefois minime et soulignée en D. Quand on cherchera à tester des marches d’escalier, la translation T obtenue par la rotation R sera légèrement plus faible pour B que pour A dans la marge H. Bien que la solution A semble cumuler plusieurs petits bénéfices, c’est la variante B qui est sélectionnée car elle confine à une posture légèrement plus stable puisque le centre de gravité est plus bas.
Justifier Moteur Genou sur le Dessus. (Choix E.)
Départager les deux candidats n’a rien d’évident et nous impose d’examiner plusieurs postures qui sont actuellement envisagées en fonction des phases de la mission. Au point de vue des efforts dans les pièces mécaniques, les deux solutions sont strictement équivalentes. Pour les déplacements de translation et de rotation idem. La sélection de la solution devra faire appel à d’autres critères. Pour aider à l’analyse, la Fig.49
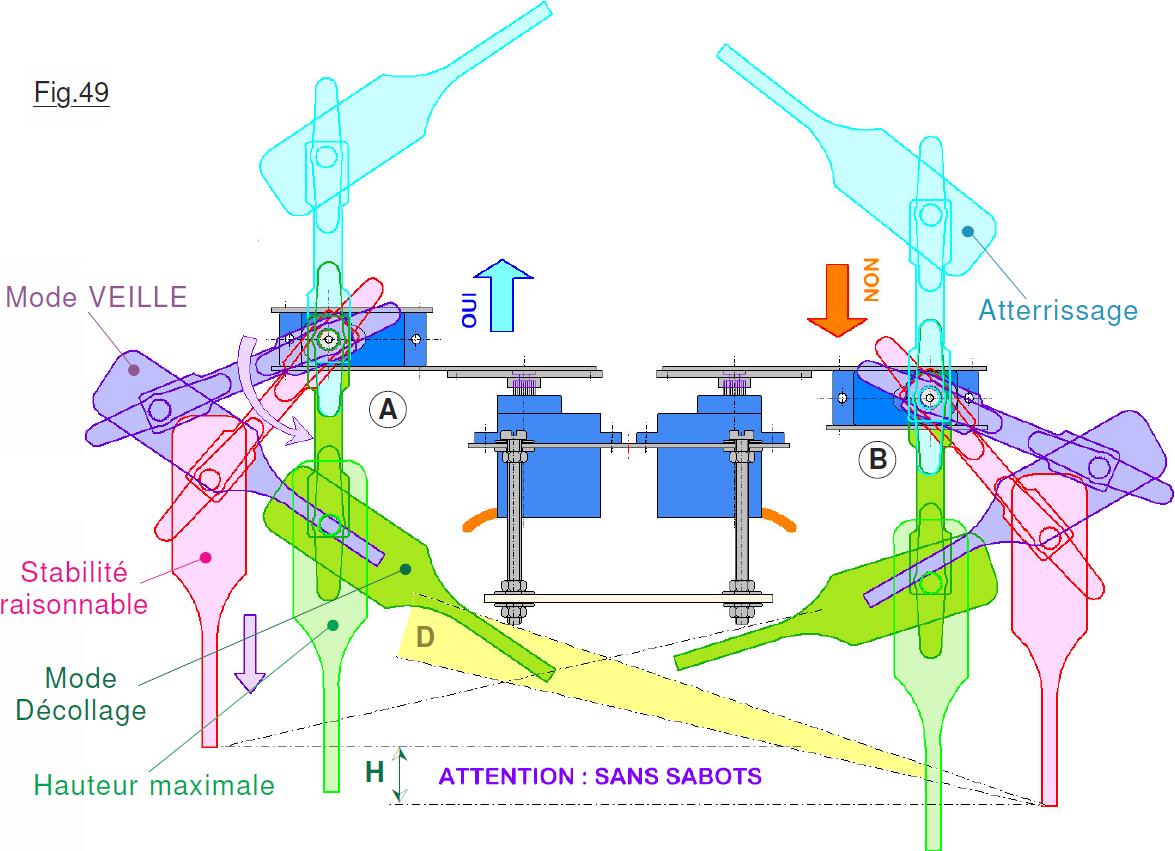 représente les deux approches possibles pour cinq postures caractéristiques. Examinons les différents cas de figure. Dans toutes les épures colorées il est manifeste que c’est la solution A qui place le centre de gravité le plus proche du sol. Donc elle procurera la stabilité la meilleure. L’épure en rose est relative à la configuration « stabilité raisonnable ». En violet est représenté le mode VEILLE. En vert foncé est visualisée la configuration de lancement. Pour ces trois postures on observe des situations équivalentes. Enfin, que ce soit la configuration « Hauteur maximale » en vert clair, ou celle en bleu pastel qui correspond à la posture d’atterrissage, difficile à dégager des avantages ou des faiblesses. Pour l’inclinaison maximale permise, c’est A qui l’emporte, la différence D étant soulignée en jaune. La garde au sol est également bien plus grande pour A que pour B. En fin de compte, en espérant ne pas se fourvoyer, la configuration A est privilégiée car elle procure une meilleure stabilité critère estimé prépondérant. De plus, ce n’est pas évident à vue de ces dessins, mais le berceau dont il sera question plus avant sera moins haut. C’est encore du « gagne petit » … gratuit donc autant en profiter.
représente les deux approches possibles pour cinq postures caractéristiques. Examinons les différents cas de figure. Dans toutes les épures colorées il est manifeste que c’est la solution A qui place le centre de gravité le plus proche du sol. Donc elle procurera la stabilité la meilleure. L’épure en rose est relative à la configuration « stabilité raisonnable ». En violet est représenté le mode VEILLE. En vert foncé est visualisée la configuration de lancement. Pour ces trois postures on observe des situations équivalentes. Enfin, que ce soit la configuration « Hauteur maximale » en vert clair, ou celle en bleu pastel qui correspond à la posture d’atterrissage, difficile à dégager des avantages ou des faiblesses. Pour l’inclinaison maximale permise, c’est A qui l’emporte, la différence D étant soulignée en jaune. La garde au sol est également bien plus grande pour A que pour B. En fin de compte, en espérant ne pas se fourvoyer, la configuration A est privilégiée car elle procure une meilleure stabilité critère estimé prépondérant. De plus, ce n’est pas évident à vue de ces dessins, mais le berceau dont il sera question plus avant sera moins haut. C’est encore du « gagne petit » … gratuit donc autant en profiter.
Justifier Moteur Genou arbre de Sortie vers l’extérieur. (Choix G.)
Contrairement au dessin de la Fig.49, seules deux postures sont significatives. Représentées sur la Fig.50 on observe que pour le décollage en vert les deux approches ne sont pas très différenciées. Des études préliminaires montrent que probablement les mouvements de translations 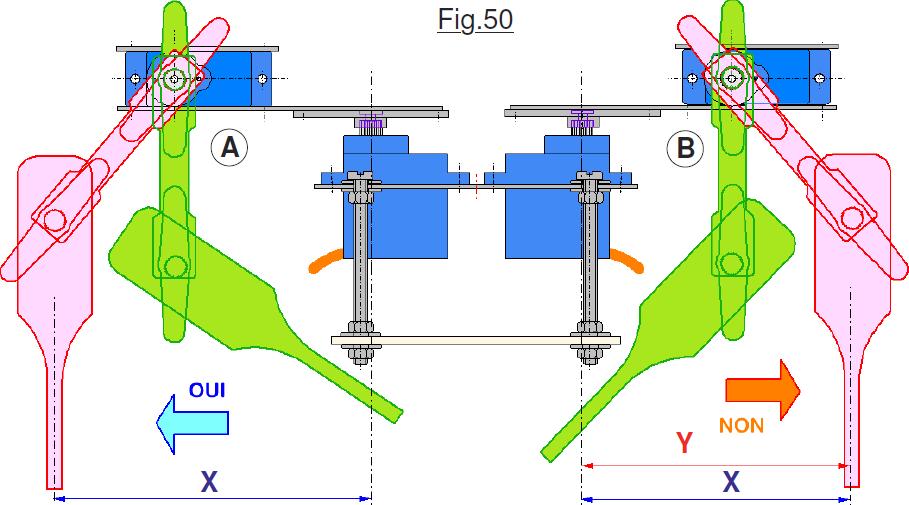 longitudinales seront obtenus à partir de la configuration stable raisonnable. Le dessin montre à l’évidence que les rayons de giration X de la griffe par rapport à la Hanche sont plus importants pour A que pour B. Pour mieux le constater la cote X a été recopiée sous Y. C’est cette rotation qui engendrera diverses translations lors des reptations longitudinales. De ce fait, A permettra d’avancer un peu plus que B pour un angle de balayage identique. Hors le but de cette sonde consiste à déplacer des capteurs sur la planète rouge. Fonction donc prioritaire, on décide à ce stade des études de privilégier A avec pour inconvénient d’augmenter un peu les efforts dans les pièces mécaniques de la petite machine car le « bras de levier » est très légèrement plus important. (Rapport 1,18 environ.) Ceci dit, le rapport qualité / prix avec A semble meilleur. On se doutait bien que la recherche d’une combinatoire optimisée pour le petit animal mécanique se heurterait forcément à de nombreux compromis.
longitudinales seront obtenus à partir de la configuration stable raisonnable. Le dessin montre à l’évidence que les rayons de giration X de la griffe par rapport à la Hanche sont plus importants pour A que pour B. Pour mieux le constater la cote X a été recopiée sous Y. C’est cette rotation qui engendrera diverses translations lors des reptations longitudinales. De ce fait, A permettra d’avancer un peu plus que B pour un angle de balayage identique. Hors le but de cette sonde consiste à déplacer des capteurs sur la planète rouge. Fonction donc prioritaire, on décide à ce stade des études de privilégier A avec pour inconvénient d’augmenter un peu les efforts dans les pièces mécaniques de la petite machine car le « bras de levier » est très légèrement plus important. (Rapport 1,18 environ.) Ceci dit, le rapport qualité / prix avec A semble meilleur. On se doutait bien que la recherche d’une combinatoire optimisée pour le petit animal mécanique se heurterait forcément à de nombreux compromis.
Justifier la position des palonniers sur le Tibia. (Choix F et K.)
Étant donné que nous avons opté pour des palonniers longs, la Fig.51 démontre clairement que placer les deux supports vers l’intérieur ou un 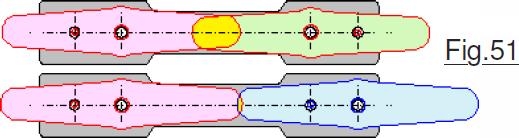 seul, dans les deux cas il y a interférence matérielle. Nous sommes alors dans l’obligation d’adopter la version longue qui est représentée sur les épures précédentes. Elle est un peu défavorable pour les efforts, mais plus efficace pour les déplacements. Les palonniers seront à l’extérieur sur le Tibia.
seul, dans les deux cas il y a interférence matérielle. Nous sommes alors dans l’obligation d’adopter la version longue qui est représentée sur les épures précédentes. Elle est un peu défavorable pour les efforts, mais plus efficace pour les déplacements. Les palonniers seront à l’extérieur sur le Tibia.
Sortie moteur du genou vers l’Extérieur. (Choix H.)
Aucune différence en ce qui concerne les efforts dans les mécanismes, le choix sera donc guidé par une étude cinématique. C’est la vue de dessus de la petit machine qui s’avère la plus propice pour examiner les conséquences de l’arbitraire imposé. Des évaluations primaires ont 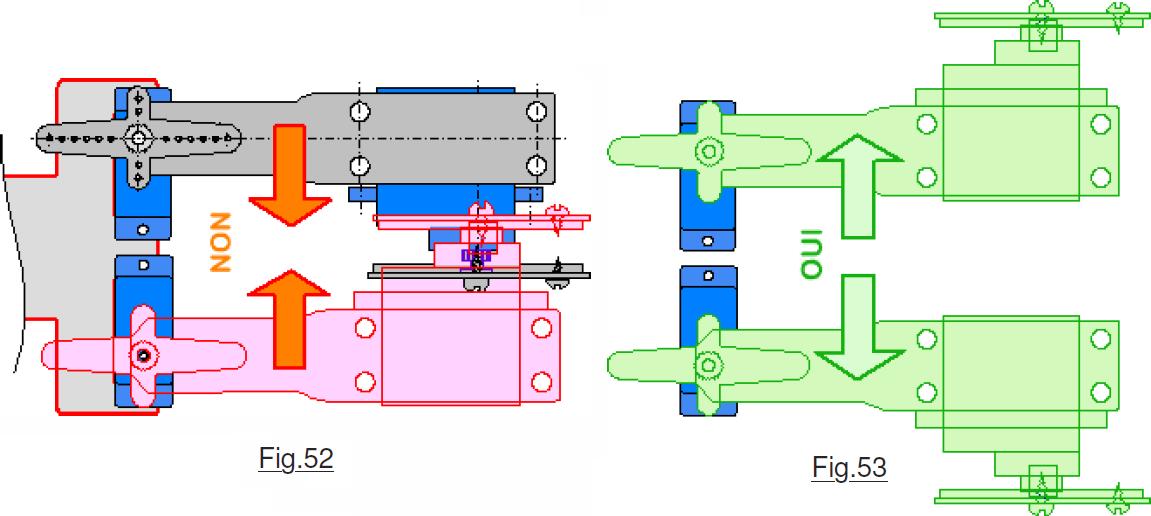
 montré qu’il serait particulièrement utile dans certaines circonstances de pouvoir orienter les Jambes directement vers l’avant ou vers l’arrière du châssis. La Fig.52 montre clairement que si les sorties des moteurs sont vers l’Intérieur il y aura interférence, alors que sur la Fig.53 on pourra dépasser l’axe si c’est utile. Nous n’avons donc pas le choix, les sorties des moteurs seront vers l’Extérieur lorsque les deux Jambes avant ou arrières sont en extension longitudinale.
montré qu’il serait particulièrement utile dans certaines circonstances de pouvoir orienter les Jambes directement vers l’avant ou vers l’arrière du châssis. La Fig.52 montre clairement que si les sorties des moteurs sont vers l’Intérieur il y aura interférence, alors que sur la Fig.53 on pourra dépasser l’axe si c’est utile. Nous n’avons donc pas le choix, les sorties des moteurs seront vers l’Extérieur lorsque les deux Jambes avant ou arrières sont en extension longitudinale.
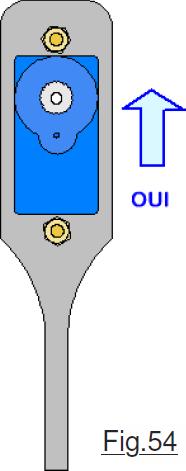
Justifier le moteur du Pied vers le Haut (Choix L.)
L’analyse à conduire ne sera pas bien longue. Il suffit de regarder la Fig.49 pour constater que moteur vers le bas la garde au sol encore diminuée deviendrait inquiétante. Plusieurs choix précédent ont poussé dans ce sens, sans compter que l’angle de pente serait encore plus diminué. Aussi, la sortie du moteur sera placée vers le haut. Si par la suite il s’avérait que c’est une fausse « bonne idée », il serait alors particulièrement aisé d’inverser le sens.
Justifier le moteur du Pied vers l’Intérieur. (Choix M.)
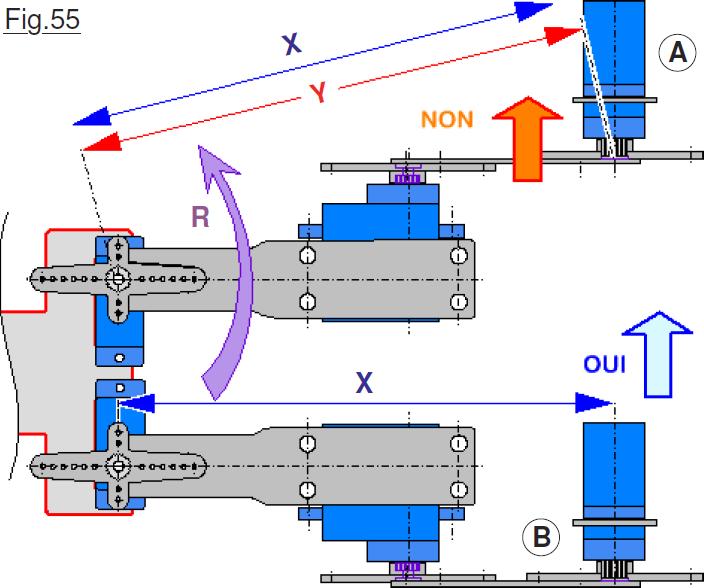 Visiblement sur la Fig.55 en A l’encombrement de la Jambe dans son ensemble est bien plus important qu’en B. Ce sera particulièrement pénalisant quand par une rotation R on orientera le membre vers le centre du châssis, augmentant de façon significative la zone d’interférence si la Jambe avant s’y trouve également. Par ailleurs, ce n’est certainement pas important, mais l’observation attentive montre que le « bras de levier » en X est un peu plus faible qu’en Y. Le rapport n’est pas important. (Environ 1,04) Il n’y a pas de petit bénéfice, car à l’arrivée tous ces facteurs s’ajoutent …
Visiblement sur la Fig.55 en A l’encombrement de la Jambe dans son ensemble est bien plus important qu’en B. Ce sera particulièrement pénalisant quand par une rotation R on orientera le membre vers le centre du châssis, augmentant de façon significative la zone d’interférence si la Jambe avant s’y trouve également. Par ailleurs, ce n’est certainement pas important, mais l’observation attentive montre que le « bras de levier » en X est un peu plus faible qu’en Y. Le rapport n’est pas important. (Environ 1,04) Il n’y a pas de petit bénéfice, car à l’arrivée tous ces facteurs s’ajoutent …
La solution A ne présentant que des inconvénients par rapport à B, dont l’un est particulièrement pénalisant, le moteur du Pied sera par voie de conséquences du même coté que celui du Genou sur le Tibia.
Justifier la semelle du moteur du Pied vers l’Intérieur. (Choix N.)
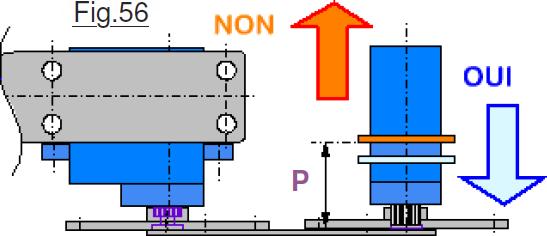 Avec cette option nous aurons passé en revue toutes les variables mis à part l’orientation des moyeux par rapport au neutre opérationnel des moteurs. La différence est subtile sur la Fig.56 avec un petit avantage pour la Griffe vers l’Extérieur : Le petit « porte à faux » P qui engendre de la torsion sur le Tibia est légèrement plus faible. C’est déjà un argument objectif pour l’optimisation.
Avec cette option nous aurons passé en revue toutes les variables mis à part l’orientation des moyeux par rapport au neutre opérationnel des moteurs. La différence est subtile sur la Fig.56 avec un petit avantage pour la Griffe vers l’Extérieur : Le petit « porte à faux » P qui engendre de la torsion sur le Tibia est légèrement plus faible. C’est déjà un argument objectif pour l’optimisation.
La suite est ici.


