Avant de s’engager dans une étude indigeste de l’agencement précis des éléments de la sonde martienne, toujours dans la salle de conception mécanique S2, nous allons sur le grand bureau qui nous est réservé ouvrir le dessin d’ensemble qui traduit les grandes lignes de la machine suite à des études préliminaires. Il est clair qu’à ce stade du projet trop d’inconnues empêchent de définir la structure définitive. Il faut bien partir d’une ébauche qui ensuite sera affinée en fonction de l’évolution du projet. Ce beau dessin, provisoire et probablement obsolète, représente uniquement l’ossature du corps de l’insecte très dépouillée. C’est à nous que revient la mission de l’étoffer.
La structure de base pour réunir ordinateur et interface.
Aanalyse des contours et des trous définies pour le châssis nous convainc immédiatement que l’électronique qui équipera la sonde n’y trouve pas sa place. Aucun des trous disponibles n’ont des entraxes correspondant aux deux modules. Le défi à relever est résumé sur la Fig.34 avec en gris le châssis en C sur lequel sont 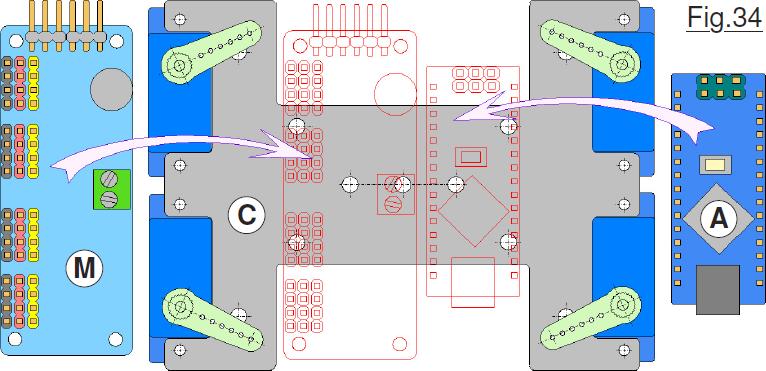 représentés en bleu les moteurs munis des palonniers courts coloriés en vert clair. En M se trouve l’interface multiplexeur et ses nombreux connecteurs. En A la petite carte électronique Arduino NANO. Pour le multiplexeur aucun trou sur C ne correspond. Quand au petit ordinateur, aucun trou de passage de vis ou de tiges filetées n’est présent pour l’immobiliser. Il nous faut donc ajouter des supports adaptés qui seront en liaison complète avec le châssis.
représentés en bleu les moteurs munis des palonniers courts coloriés en vert clair. En M se trouve l’interface multiplexeur et ses nombreux connecteurs. En A la petite carte électronique Arduino NANO. Pour le multiplexeur aucun trou sur C ne correspond. Quand au petit ordinateur, aucun trou de passage de vis ou de tiges filetées n’est présent pour l’immobiliser. Il nous faut donc ajouter des supports adaptés qui seront en liaison complète avec le châssis.
Pour pouvoir immobiliser la carte Arduino, on sera impérativement dans l’obligation de concevoir un petit circuit imprimé sur lequel seront soudées deux rangées de connecteurs HE14 séparés de l’écart correspondant aux lignes des broches de A. Ce circuit supportera aussi le BUZZER, divers connecteurs de liaison avec le reste de l’environnement, et probablement quelques résistances. L’idée initiale consiste à utiliser les trous disponibles sur la zone centrale de C pour y fixer une plaque isolante complémentaire. Ensuite, c’est sur cette dernière que seront à leur tour assemblés par de la visserie idoine les deux modules M et circuit imprimé spécifique supportant Arduino.
La bestiole robotique prend corps.
Cette première étude concerne le corps de la sonde, (D’où ce jeu de mots facile pour le choix du titre !) sans se préoccuper de la distribution des membres. (*) Une première estimation laisse à penser que le multiplexeur doit se trouver sur le dessus, ne serait-ce que pour une distribution des liaisons avec les moteurs qui risque moins de « coincer » sur le dessous. Par ailleurs cette configuration place plus bas le châssis, diminuant l’encombrement global et surtout améliore la stabilité de la machine. On se rend rapidement compte qu’il n’est pas possible de placer sur le dessus à la fois Arduino et le multiplexeur. (Manque de place et limitation de l’amplitude de rotation des fémurs.) Aussi, le module Arduino et le circuit imprimé qui le supporte seront immobilisés sur le dessous.
 Trois raisons principales imposent la présence d’un bouclier ventral. Ce dernier offrira une protection thermique (Frottements cinétiques.) quand le petit vaisseau effectuera sa plongée vertigineuse vers le sol. Puis, trois parachutes vont s’ouvrir en cascade pour procéder au freinage. Le premier le plus petit sera ouvert à haute altitude, quand la sonde présente une vitesse considérable. Puis, vitesse réduite dans de fortes proportions, un deuxième parachute va continuer le freinage. Enfin, à environ deux kilomètres du sol, une troisième grande corole va se déployer. JEKERT va alors descendre relativement lentement. L’impact avec le sol sera malgré tout « traumatisant », surtout si le poser est en biais ou que la sonde se pose sur un caillou assez proéminent. Il n’est pas question dans ces conditions que l’atterrissage se fasse sur les pieds. Les pattes seront escamotées, et l’animal se posera sur le ventre … muni dans ce but du bouclier de protection mécanique.
Trois raisons principales imposent la présence d’un bouclier ventral. Ce dernier offrira une protection thermique (Frottements cinétiques.) quand le petit vaisseau effectuera sa plongée vertigineuse vers le sol. Puis, trois parachutes vont s’ouvrir en cascade pour procéder au freinage. Le premier le plus petit sera ouvert à haute altitude, quand la sonde présente une vitesse considérable. Puis, vitesse réduite dans de fortes proportions, un deuxième parachute va continuer le freinage. Enfin, à environ deux kilomètres du sol, une troisième grande corole va se déployer. JEKERT va alors descendre relativement lentement. L’impact avec le sol sera malgré tout « traumatisant », surtout si le poser est en biais ou que la sonde se pose sur un caillou assez proéminent. Il n’est pas question dans ces conditions que l’atterrissage se fasse sur les pieds. Les pattes seront escamotées, et l’animal se posera sur le ventre … muni dans ce but du bouclier de protection mécanique.
Troisième critère incitant à munir la structure d’une surface de sustentation ventrale : Le mode veille pour lequel les jambes sont relevées et les pieds ne touchent plus le sol. (Explications plus loin …) Enfin, le bouclier mécanique facilitera l’assemblage de la sonde sur son berceau quand elle sera intégrée dans le lanceur Ariane.
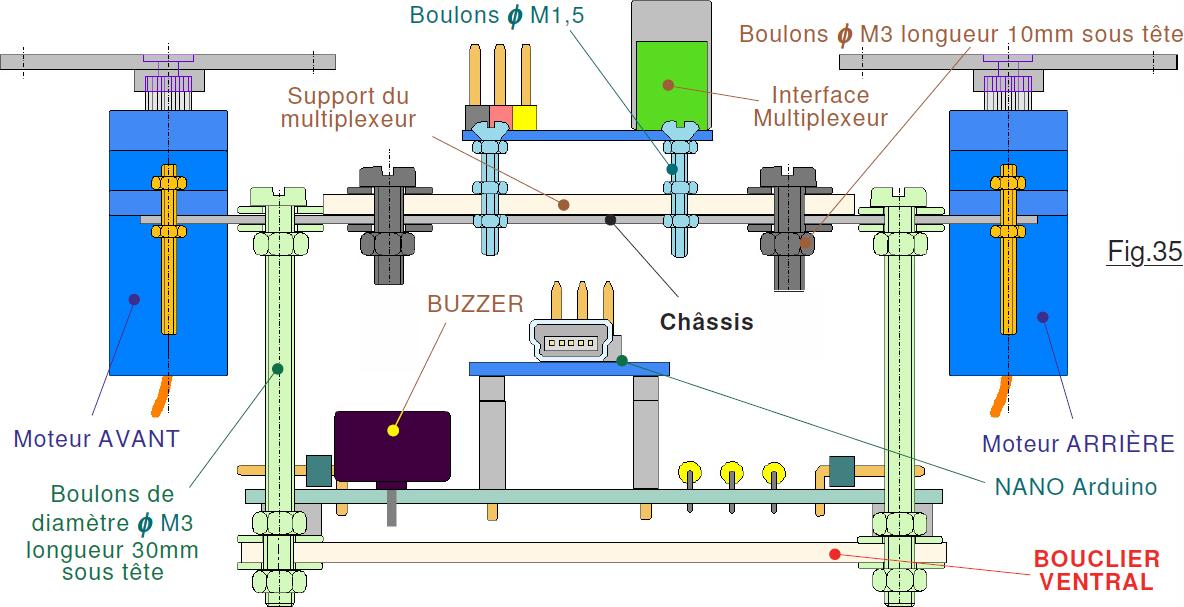
Le dessin de la Fig.35 montre la sonde vue de coté. Les palonniers des moteurs sont dans l’orientation longitudinale. La position du bouclier ventral est choisie pour pouvoir utiliser des vis fM3 du commerce faciles à trouver, et laisser suffisamment de place sous le châssis pour y loger sans trop
de problème la carte Arduino. Ces deux critères doivent de plus éviter un encombrement ventral trop important pour ménager « une garde au sol » suffisante. La solution adoptée constitue un compromis qui semble acceptable. Les deux plaques support en matériau isolant font 2mm d’épaisseur.
NOTE : Pour permettre un maximum de souplesse lors des études futures, le circuit imprimé qui supporte Arduino est prévu le plus grand possible compatible avec les contraintes d’encombrement. Il présente pratiquement les dimensions du bouclier ventral. À ce stade des études on estime que la carte Arduino sera centrée latéralement, le reste comme la position du BUZZER n’est que vague conjecture, le circuit imprimé n’étant pas encore étudié finement. Il faut attendre de savoir exactement tout ce qui y sera soudé, quand les études seront suffisamment avancées.
Pour que vous puissiez réaliser des recherches personnelles menées avec des épures fiables, outre les dessins des diverses pièces mécaniques de la sonde, vous disposez avec la visionneuse des représentations en trois vues et à la même échelle pour la petite carte Arduino et pour le multiplexeur. Il reste à mon sens une petite pierre d’achoppement : Que ce soit pour assembler les moteurs ou pour immobiliser le multiplexeur, il faut trouver des vis ou de la tige filetée au diamètre assez peu courant ØM1,5 ainsi que les minuscules écrous associés. Ce type de visserie n’est généralement pas disponible dans la quincaillerie du coin, et pas facile à trouver sur Internet. Pour ma part je disposais d’une quantité suffisante de vie et d’écrous de récupération. Coupées à une longueur de 13mm à 14mm les longues vis m’ont permis de dégager assez de petites tiges filetées pour assembler les moteurs. Aussi, je vous souhaite de résoudre facilement cette difficulté. Ensuite, construire le petit robot imposera du soin et de « la tendresse » mais n’opposera aucune difficulté. On va pouvoir respecter le planning … tout va bien !
La suite est ici.


