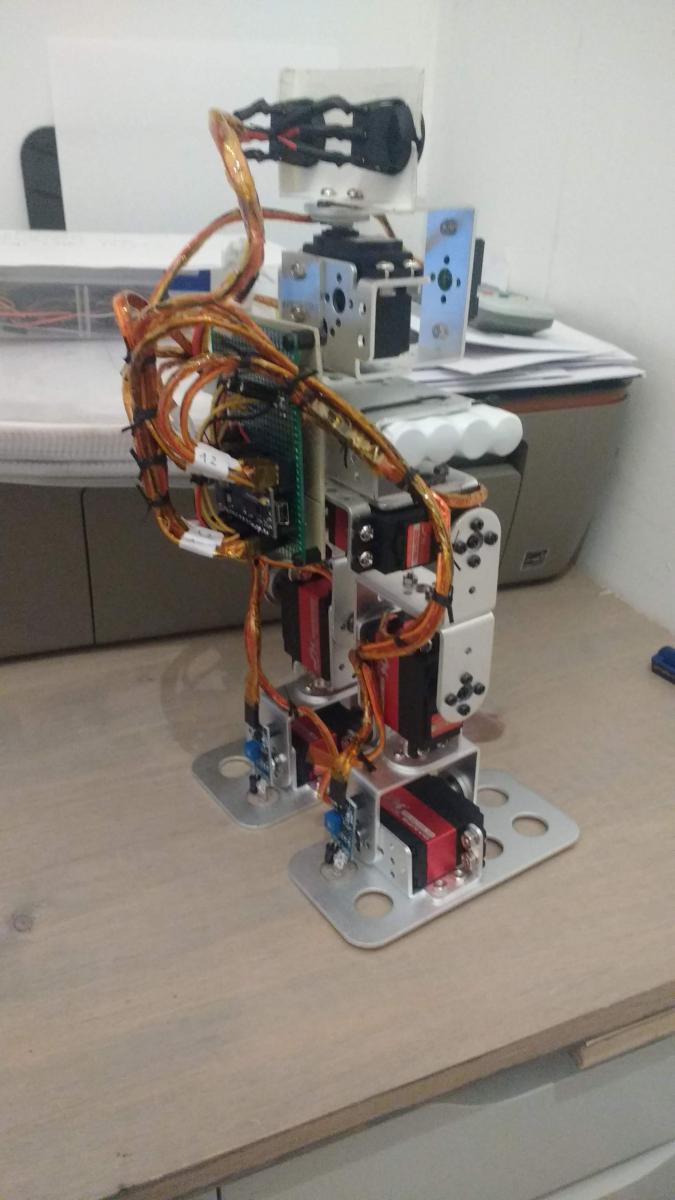
Rectification, première passe d'amélioration et enfin il avance, plus qu'à régler un peu pour éviter la déviation et on pourra passer à l'étape suivante. Hâte .... Très hâte de passer a la suite pour lui permettre de remporter le concours MACHINE GONES, au moins il avancera

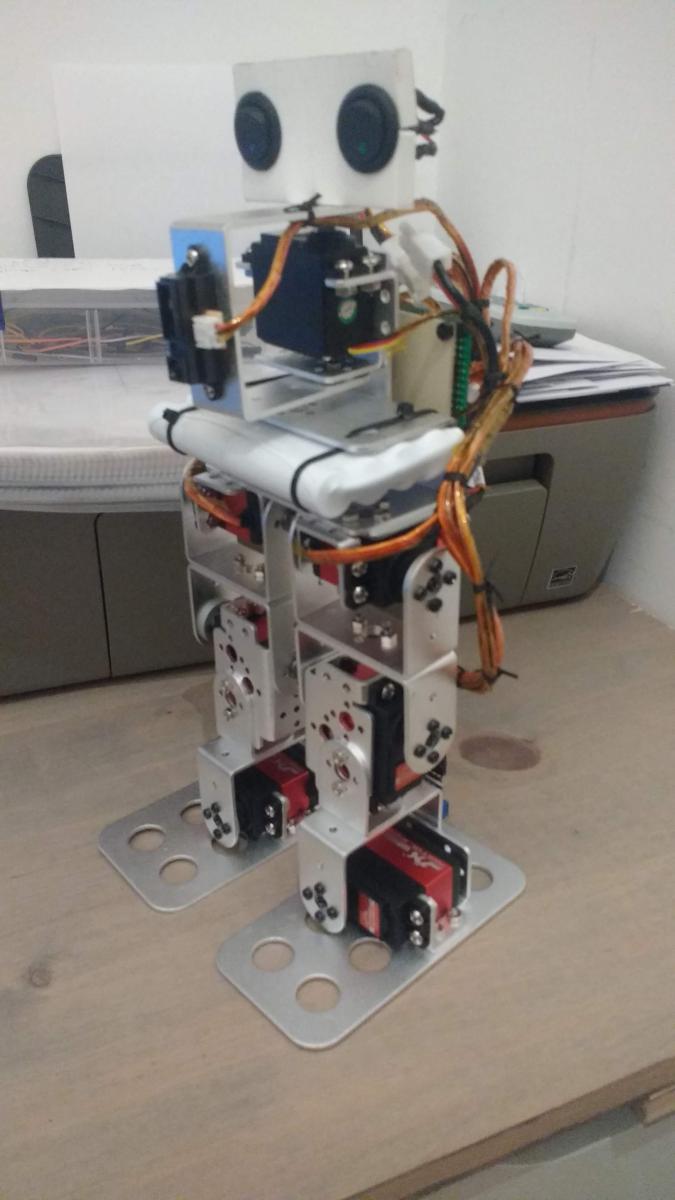
Et tiens j'ai eu aussi une réflection avec une E/S numérique et deux LEDs qui s'allume alternativement. Peut être mettre ça sur mon bipede.