
Tu veux que je fasse ça si j'ai bien compris :

Staff Robot Maker


Posté 12 mars 2020 - 09:45
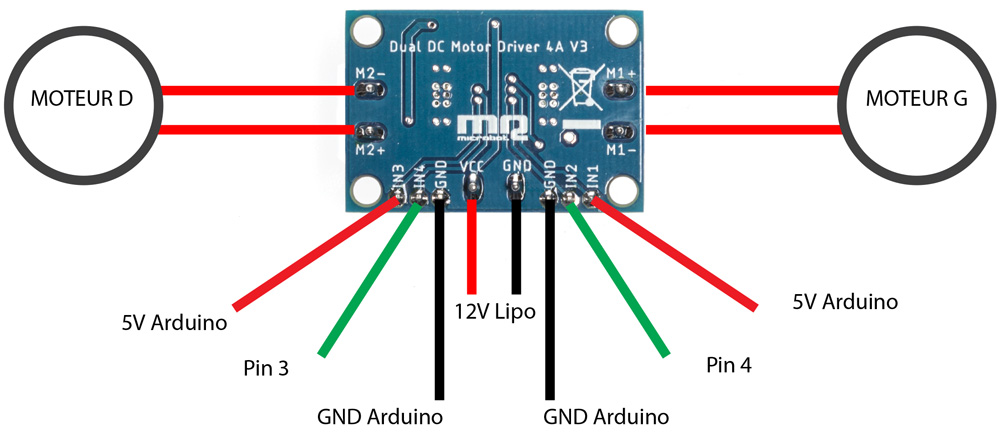
PIN3 et PIN4 tu les mets à GND aussi.
puis de temps en temps tu changes en les mettant au 5V en direct, puis tu rechanges et tu vérifies que les moteurs se comportent bien sans caler.
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre
Posté 12 mars 2020 - 11:59
Je viens de tester ta solution, en inversant les IN sur +5V et GND.
Le moteur gauche refuse de reculer. Quand il devrait reculer, il tourne d'1 mm et s'arrête.
Ce qui marche :
Moteur G avance + Moteur droite avance
Moteur D recule + Moteur G avance
Le reste ne marche pas. Je précise d'ailleurs qu'hier, des fois ça marchait les 2 qui reculent, et le gauche recule + droit avance.
Je vais changer de driver pour voir.
J'ai trouvé sa fiche technique sur internet :
 pj2-35683-1612.pdf 1,2 Mo
301 téléchargement(s)
pj2-35683-1612.pdf 1,2 Mo
301 téléchargement(s)
Staff Robot Maker
Posté 13 mars 2020 - 10:56
Attend encore un peu.
tu as bien testé toutes les configurations? Y compris 5V et 5V ? Si ça se trouve ton driver de moteurs ne fonction pas comme le L9110 mais change de sens si tu mets 5V et 5V ...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre
Posté 13 mars 2020 - 01:34
en fait quand on passe les 2 port du channel 1 par exemple ( IN1 et IN2 ) à HIGH, ça stoppe le moteur, mais je vais quand même tester.
Staff Robot Maker
Posté 13 mars 2020 - 03:34
Bon du coup ton driver est visiblement défectueux ... je ne sais pas quoi dire d'autre ...
Je vais changer de driver pour voir.
J'ai trouvé sa fiche technique sur internet :
tu peux tester cel driver là sans problème il marche bien 
par acquis de conscience il faut juste vérifier le courant max que consomment tes moteurs pour être sûr que ça reste dans les spec de la carte =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre
Posté 13 mars 2020 - 05:38
J'ai contacté le site où j'ai acheté le chassis, ils m'ont dit de prévoir 1.5 A grand maximum par moteur pour être large.
Ce driver va jusqu'à 2A par canal donc c'est bon je pense.
Faut-t-il que je mesure l'ampérage sur mes moteurs pour être sûr ?
Sinon j'ai un autre souci, j'ai bien reçu l'arduino nano + shield mais je n'arrive pas à uploader de code dessus. La carte est reconnue dans windows ( enfin je crois ), dans le gestionnaire de périphériques il y a marqué : USB-SERIAL CH340(COM4).
J'ai vu sur internet qu'il y a des soucis avec les clones arduino nano.
Si quelqu'un connait la solution, je suis preneur 
J'ai un message en orange :
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0x0d
avrdude: stk500_recv(): programmer is not responding
EDIT : problème résolu ! Il suffit de changer le type de carte par Arduino Duemilanove or Diecimilia .... et oui je suis bête j'avais choisi Arduino Nano  . J'aimerai bien comprendre la logique dans tout ça, si quelqu'un a la réponse ça m'intéresse.
. J'aimerai bien comprendre la logique dans tout ça, si quelqu'un a la réponse ça m'intéresse.
La source où j'ai trouvé la solution.
Sinon les servo marchent niquel sur le shield, je vais tester avec le driver moteur ce soir ( même si celui-ci est défectueux )
Staff Robot Maker
Posté 13 mars 2020 - 06:51
Avais tu installé le driver recommandé dans cette page https://www.robot-ma...er-ide-arduino/ à la fin de l'étape 3 ?
Perso je choisis bien nano pour programmer les cartes ... Du coup ça doit venir de ta configuration de l'IDE arduino ou bien du driver ...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre
Posté 13 mars 2020 - 07:30
Oui j'ai trouvé ce driver sur internet, quand je l'execute, j'ai un mesage d'erreur comme quoi l'installation a échouée ...
Bon c'est pas grave, du moment que ça fonctionne  . Ca pose pas de problème si je sélectionne une autre carte à la place de la nano ?
. Ca pose pas de problème si je sélectionne une autre carte à la place de la nano ?
Je viens de tester le driver sur le shield avec la nano, ça marche très bien, sauf que le moteur gauche ne veut toujours pas reculer .... je vais changer de driver.
Pour le driver c'est bon je peux partir sur celui ci ?
Pilier du forum

Posté 13 mars 2020 - 09:12
Attention, très souvent, avec les clones Nano, dans le menu Outils/Processeur, il faut également sélectionner "Old Bootloader".
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Staff Robot Maker
Posté 13 mars 2020 - 10:15
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre
Posté 13 mars 2020 - 10:58
C'est bon j'ai passé commande.
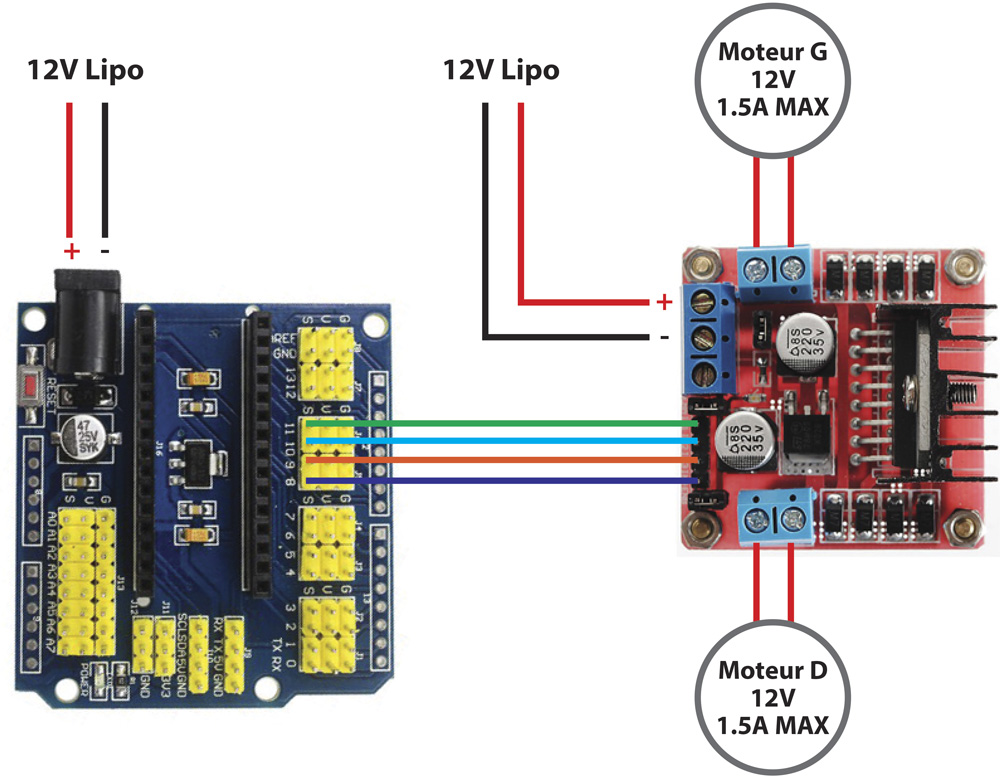
J'ai fait un petit schéma de cablage, dites moi si tout est ok :
La fiche technique si besoin :
pj2-35683-1612.pdf 1,2 Mo
83 téléchargement(s)
Staff Robot Maker
Posté 13 mars 2020 - 11:25
En mode 4 fils comme ce que tu as branché, si tu veux pouvoir contrôler la vitesse de tes moteurs ( et pas les mettre à fond ou allumé ) il te faudra 4 pin PWM du coup .
Il faudra donc que tu choisissent parmi les pins 3 5 6 9 10 et 11. qui sont les seuls à avoir la fonction PWM sur la nano.
Pour être au plus proche du câblage actuel il faudrait à minima que tu déplace le fil sur le pin 8 et le mettre sur le pin 6 ...
Mais ... Si tu rentre un peu plus en détail dans le hadware de la nano, tu verras que les pin PWM sont regroupés par paire en fonction du timer sur lequel ils sont reliés ... Et tu te rendras compte que 3 et avec 11 , 5 et 6 sont ensemble et 9 et 10 sont ensemble ...
Perso j'essaye toujours de mettre les pwm ensemble
=> Une paire pour un moteur ... exemple 5 et 6 pour le moteur A et 9 et 10 pour le moteur B ...
Autre option, ce driver peut être mis en mode 6 fils.
Mais ne nécessitant plus que 2 PWM ... ( les deux petits jumpers qui sont présent sur la photo de la carte peuvent être enlevé pour laisser y connecter deux fils de plus , 1 fil par jumper ( sur la même ligne que les 4 pins que tu as relié à ta arduino ).
Dans ce cas tu pourras par exemple utiliser les pins 4 7 8 et 12 à la place de tes pins ( 8 9 10 11 ) et ajouter les deux pins 5 et 6 à la place des deux jumpers...
J'ai volontairement sauter les pins PWM pour les 4 GPIO qui ne nécessitent pas de PWM mais si tu veux utiliser un pin capable de faire du PWM en tout ou rien pour avoir un câblage plus simple ou autre tu peux... Car dans ce cas qui peut le plus ( pwm ) peut bien évidement le moins ( Juste on off tout simple )
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre
Posté 13 mars 2020 - 11:40
Staff Robot Maker
Posté 13 mars 2020 - 11:59
Jai lu dans la fiche technique quon peut enlever le jumper ( celui proche du 12v ) afin dalimenter larduino en 5v . Mais uniquement si lalimentation est supérieure à 12V .
Ce procédé simplifie mon cablage dalimentation, mais je suis en 12V tout pile donc je ne pense pas que ce soit une bonne solution.
En fait c'est le contraire, tu peux alimenter ta arduino en 5V en la branchant sur le bornier si le jumper est présent.
Et si c'est une solution envisageable si elle te convient car oui ta batterie est largement suffisante pour que le convertisseur 5V présent sur ce driver de moteur fonctionne sans problème
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre
Posté 14 mars 2020 - 06:24
ha oui j'ai mal compris.
En fait il y a écrit ça dans la fiche technique :
Membre chevronné

Posté 14 mars 2020 - 09:18
Bonjour,
le premier cas, c'est uniquement la ligne "Remove the jumper at position 3 if your power supply is above 12V". C'est probablement car le régulateur de tension ne supporte pas plus que 12V et cramerait donc si tu laisse le jumper alors que tu mets par exemple 20V.
La deuxième ligne ("This activates the power supply for the on-board 5V regulator.") dit juste que le jumper, s'il est présent, active le régulateur 5V (cette ligne est juste une explication sur le role du jumper, elle ne fait pas parti du premier cas)
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Staff Robot Maker
Posté 14 mars 2020 - 02:55
il faudra brancher le 5V et la masse sur les broches indiquées V ( 5V) et G ( GND) =) celle qui te conviendra le mieux elles sont toutes reliées ensemble =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre
Posté 14 mars 2020 - 05:02
Ok du coup je peux brancher comme ceci ?
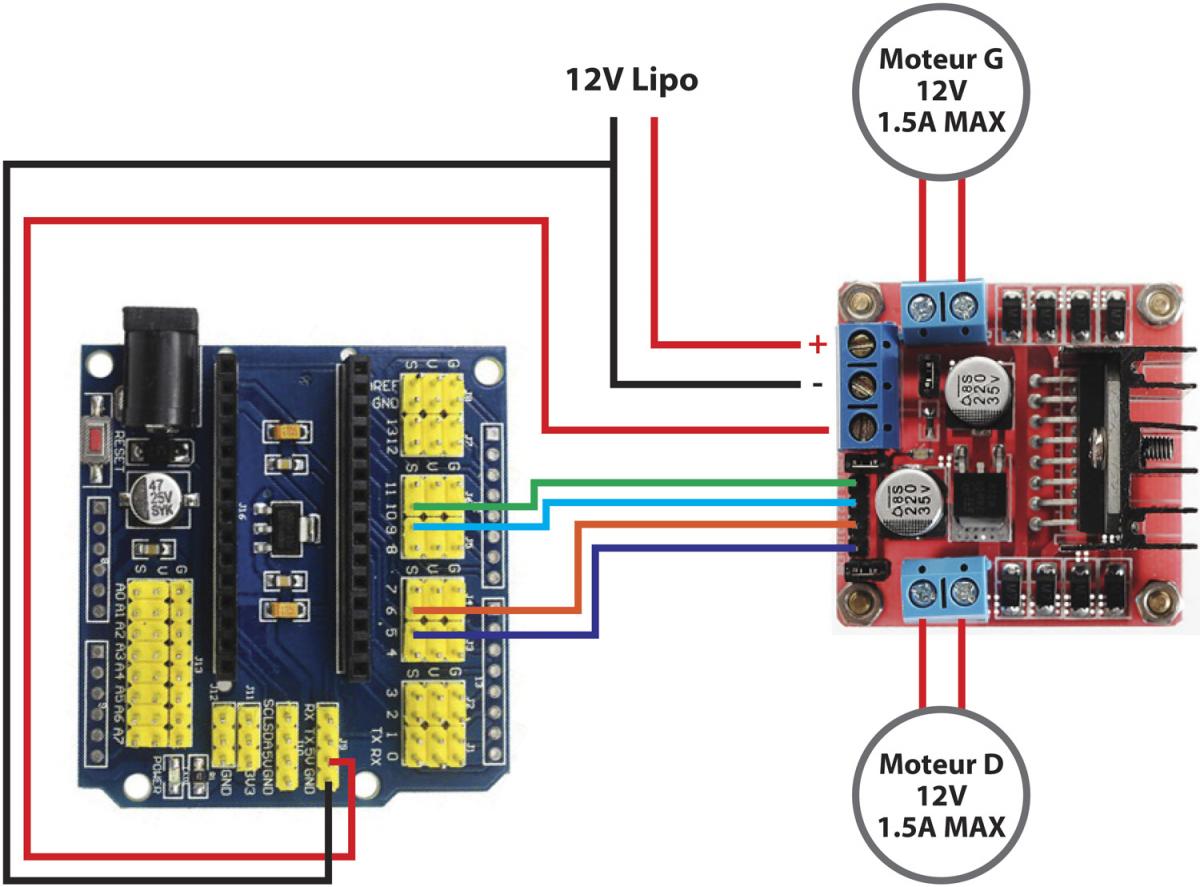
Ya juste une chose que je ne comprend pas. Normalement les +5V de l'arduino servent de sortie de courant pour alimenter des composants ? J'ai lu qu'il ne faut pas essayer d'alimenter l'arduino sur les +5V, ça peut l'endommager.
Quand on utilise une autre source de courant que la prise USB ou jack, j'ai lu qu'il faut alimenter l'arduino sur la pin Vin ( voltage IN ). Or sur le shield, il n'y a pas de pin Vin. Par contre je remarque sur la nano qu'il y a un pin Vin, avec 6 broches à côté.
Si quelqu'un peut m'éclairer sur ce point









0 members, 0 guests, 0 anonymous users





