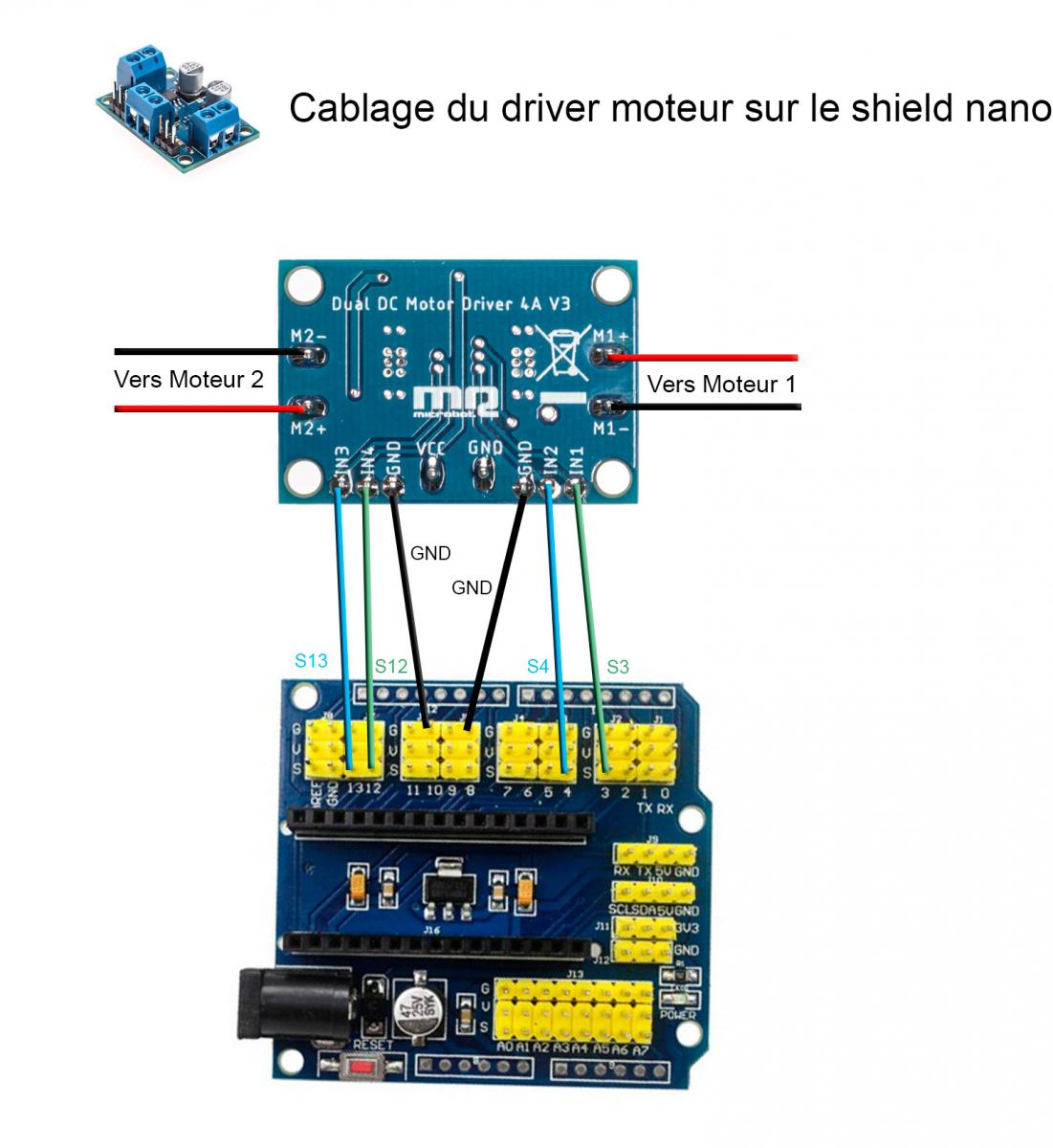
Ton schéma de branchement n'est pas bon.
Sur le Shield, tu as des ensembles de 3 connecteurs bien alignés. Si tu regardes bien, il y a des indication G, V et S.
G, c'est la masse, V la tension et S le signal.
A chaque fois que tu vas connecter un moteur(la commande dans ton cas), un servo ou un capteur, tu vas utiliser un de ces connecteurs. Alors que toi, dans ton schéma, tu as réparti tes fils sur différents connecteurs.
En résumé, tu dois connecter chaque moteur avec une nappe de 3 brins, terminée par un connecteur Dupont, femelle. Un connecteur Dupont femelle, c'est celui qui te permet de connecter ton servo.
Je n'en ai pas trouvé sur la boutique, ça ressemble à ça, https://www.amazon.f...91&s=hi&sr=1-13
Tu dois couper une extrémité. Les 3 fils coupés doivent être reliés/soudés à ton driver et le connecteur doit être enfiché sur un des connecteurs du Shield, dans le bon sens.
N'achète pas en Chine, actuellement le délai est de 6 mois...




 . De toute façon si l'arduino n'arrive pas à alimenter le servo, il redémarre ? Il ne va pas griller ?
. De toute façon si l'arduino n'arrive pas à alimenter le servo, il redémarre ? Il ne va pas griller ?

 .
.

 .
. 















