Bonsoir,
je dirais que la prochaine étape est de faire tourner ton servo (à vide) depuis l'arduino, ça permettra de vérifier le débattement du servo (voir si le débattement suffit ou pas pour ton application). Pour le code, dans les exemples, il me semble qu'il y a un programme Servo/Sweep qui fait faire des vas et viens au servo (et permet donc de vérifier l'amplitude de mouvement.
Après, il reste la question du branchement du servo, là tu as 2 options (enfin, il y en a plus, mais c'est les plus faciles pour commencer) :
1) tu alimente le servo via une source de tension (5 ou 6V), et l'arduino via lUSB. Dans ce cas, il faut forcément relier la masse (ie le -) de ta source de tension à un pin GND de l'arduino (pour avoir une masse commune).L'avantage est que cette technique marchera quel que soit la puissance de ton servo
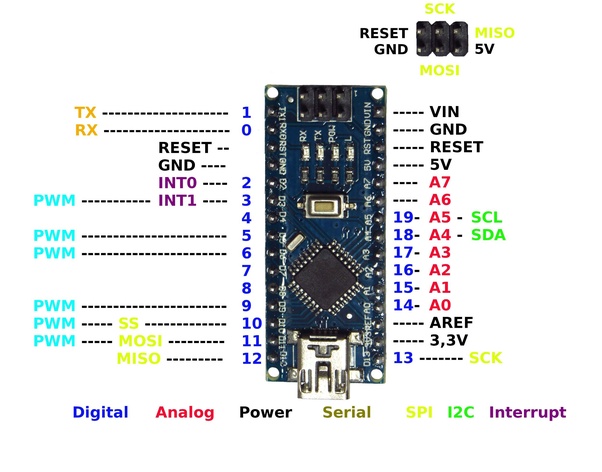
2) tu alimente l'arduino par l'USB, et tu alimente le servo directement en 5V depuis l'arduino (ie tu relie le fil rouge au pin 5V, et le pin noir au pin GND). ATTENTION, l'arduino ne peut fournir qu'un peu moins de 500mA quand il est alimenté par l'USB : ça devrait donc pas poser de problème pour ton petit servo SI TU LE FAIT TOURNER DANS LE VIDE. Si tu le fais forcer ou que tu passes à un plus gros servo, je déconseille, à moins que tu ne trouve une documentation (ou un test) pour avoir le courant max (stall current en anglais)
Dans tous les cas, le fil jaune ira sur un pin PWM de l'arduino
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.




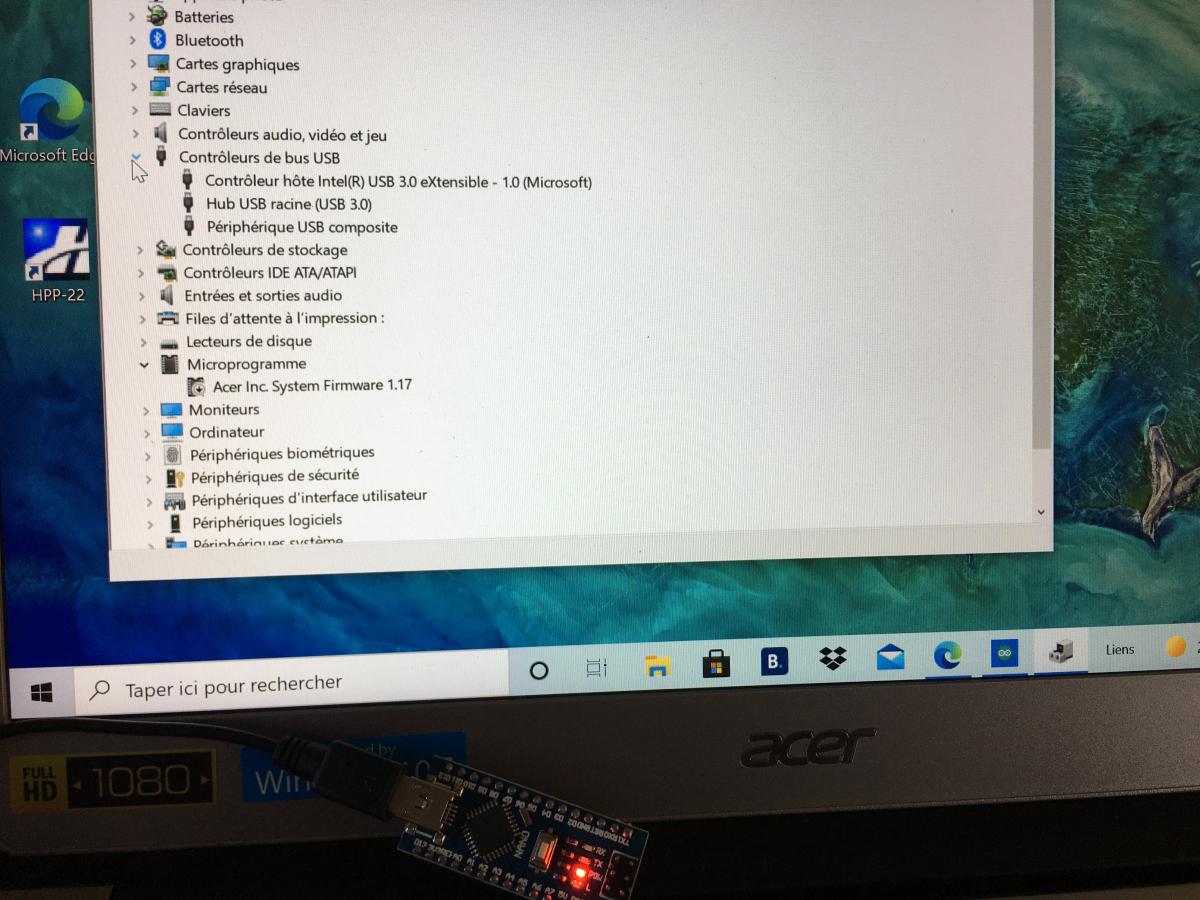


 le souci vient bien du cable... du coup j'ai pu faire un premier exemple (basic 1) et ça fonctionne aussi bien sur PC que sur Mac J'avoue que je suis bien soulager .. Je vasi pouvoir avancer sur le projet
le souci vient bien du cable... du coup j'ai pu faire un premier exemple (basic 1) et ça fonctionne aussi bien sur PC que sur Mac J'avoue que je suis bien soulager .. Je vasi pouvoir avancer sur le projet