



Et par pitié, évite la famille des L298 : c'est des antiquités avec des performances horribles (https://www.st.com/r...asheet/l298.pdf) : à 1A, tu as entre 1.8V et 3.2V de perdu dans le pont en H, à 2A tu peux perdre jusqu'à 4.9V de tension. Toute cette tension est dissipée en chaleur, donc il faut refroidir le L298 (et tu vides inutilement ta batterie).
@Mike : pourquoi continuer à vendre un composant aussi antique? (il semblerait qu'il existait déjà au milieu des années 70 (https://forum.arduin...98-age/480905/2), c'est à dire quand mes parents étaient des gosses!)
Je suis d'accord pour dire que le L298 c'est pas le top du top et que c'est pas celui que je recommande le plus, ( d'ailleurs j'en ai à peine 25 en stock sur 3 références ... alors que j'ai plus de 50 pcs sur une seule référence pour d'autres produits de la même famille) mais c'est un produit qui est moins cher que pas mal d'autre solution, et "plus costaud " que d'autres solution ( plus costaud que le TB6612fng ) ... De plus il est fournit sur des cartes avec un forme factor intéressant et est présent dans de nombreux tutoriels ce qui en fait un produit demandé ... C'est un peu la loi de l'offre qui s'ajuste à la demande ...
Par contre d'expérience il est pas si " horrible que tu le dis " ... Pour du 2A il chauffe pas tant que ça ... Il est largement utilisable... Plus utilisable que le TB6612FNG ...
D'ailleurs sur un projet j'ai fini par remplacer les TB6612FNG qui étaient prévu initialement par des L298 carle client réussissait à suffisamment forcer sur ses moteurs ( qui étaient prévu pour 1A max en condition normale ) et réussissait à cramer le TB6612FNG ... Après remplacement plus de soucis ...
Bref pour un meilleur rendement et pas trop de courant et pas trop cher il y a des nouvelles références qui marchent bien, mais si tu veux un truc solide, pas cher et que le rendement c'est pas ta priorité N°1 , le l298 a encore selon moi une petite place ... En 70 le matériel fabriqué à cette époque il était encore costaud... Je suis sûr qu'il sera encore utilisé dans 50 ans ce composant ... x)
Après si tu me recommandes d'autres driver de moteur pour la plage de 3A en continue, qui sont costaud est pas cher ( genre 6€ 7€ max ) je suis preneur de référence pour remplacer le L298 ...






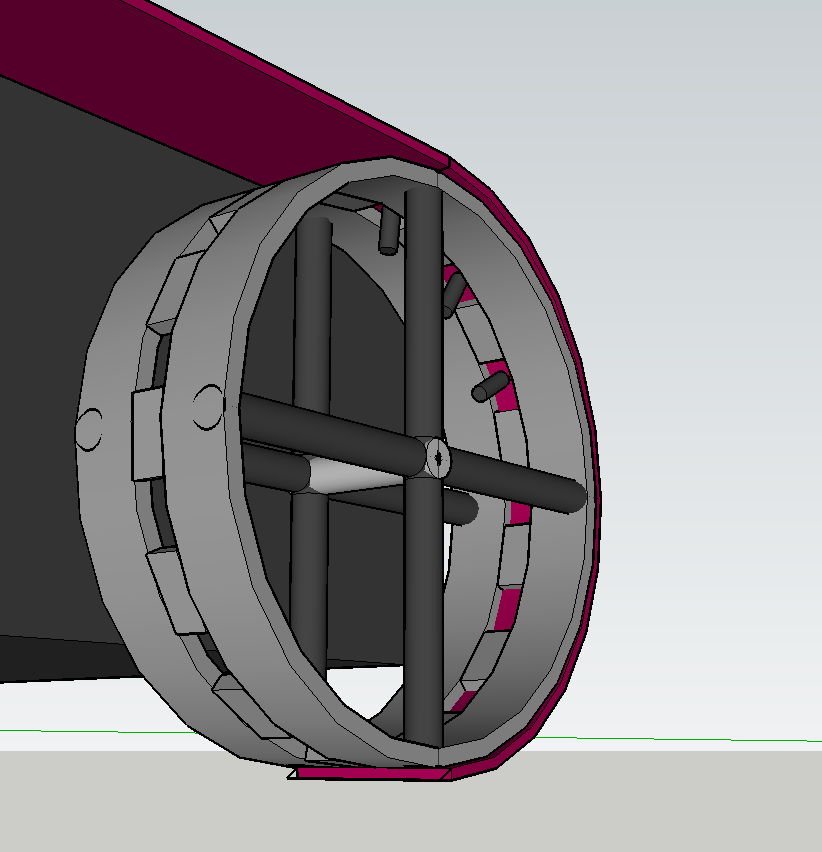
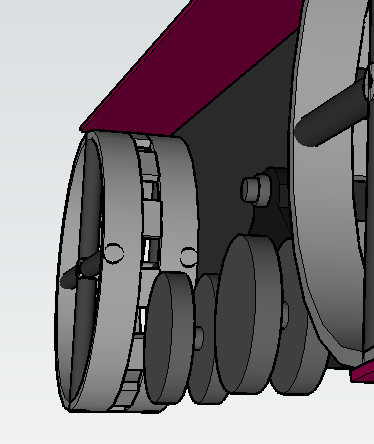
 ) monter des escaliers, se mouvoir dans tout sorte de terrain qu'il soit plat ou en pente tant que le robot adhère.
) monter des escaliers, se mouvoir dans tout sorte de terrain qu'il soit plat ou en pente tant que le robot adhère.














