
Ou que je commande pour savoir exactement ce que jai

265 réponses à ce sujet

#83

Mike118
-

- Administrateur
-

- 9â¯986 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 24 avril 2012 - 01:03
je pense qu'il veut que tu fasse le schéma électronique du systeme analogique ..
cordialement Maxou
exactement

Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#84
Mike118
-
- Administrateur
-
- 9â¯986 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 24 avril 2012 - 01:05
Enfaite je comprend pas trop ce que tu veut que je fasse. Un shema technique du systeme entier ?
oui tu le dessine
et que tu mets bien sur le schémas A B C D E Uc1 Uc2 Um1 Um2
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!

#87
Mike118
-
- Administrateur
-
- 9â¯986 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 24 avril 2012 - 02:03
Bon voila le debut mais je galére grave
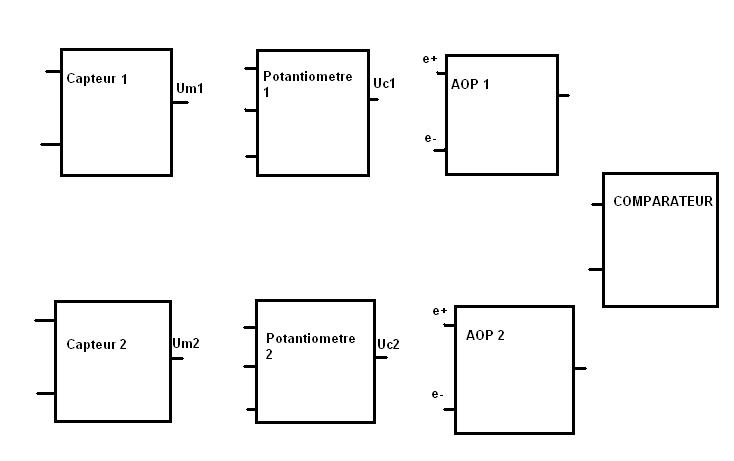
bon je vais te donner un coup de pouce : commence par faire des boite comme on a vu au début avec les entrées et sortie et en bas des boites tu mettras les composant
tu dois faire
- 2 tensions variables réglable par potentiomètre Uc1 et Uc2
- d'avoir une pin A à -VCC si on est trop près du mur d'après le capteur 1 défini pour Um1=Uc1 et +Vcc si on estime qu'on est assez loin
- d'avoir une pin B à -VCC si on est trop près du mur d'après le capteur 2 défini pour Um2=Uc2 et +Vcc si on estime qu'on est assez loin
- d'avoir une pin C à +VCC si on est trop près du mur d'après le capteur 2 défini pour Um2=Uc2 et -Vcc si on estime qu'on est assez loin
- d'avoir une pin D à environ 2-3V si A est à VCC ou si B est à VCC sinon D est à 0V
- d'avoir une pin E à environ 2-3V si A est à VCC ou si C est à VCC sinon E est à 0V
ce qui te fais 7 boites avec chacune une sortie fonction de deux entrées ( sauf : trois entrées pour les potentiomètres ) et précise les noms des entrées dans le cas des comparateur ( entrée inverseuse ou non inverseuse)
les entrées pouvant être 3v la masse et "réglage utilisateur " (pour les potentiomètres ) mais aussi Um1 Uc1 Um2 Uc2 ( pour des comparateurs par exemple à toi de voir qui rentre dans e- et qui rentre dans e+ en fonction de ce qui est demandé pour donner par exemple A B ou C en sortie ) et A ,et B ou C dans les " Ou " qui donneront en sortie E ou D.
PS: ton début de schémas me semble faux donc commence par les boites ^^
Rappel : tu as au total : 3 aop de tension de saturation VCC ( va voir la dicussion sur les aop si besoin )4 diodes ( va voir le lien sur les "ou " si besoin ) 2 résistance et 2 potentiomètre ( pont diviseur )
tu as : une pin 3V , la masse , les deux tension Um1 et Um2 mesuré par tes capteurs avec : plus on est pres d'un mur plus Um(1ou2 en fonction du capteur qui détecte le mur ) augmente !
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!

#89
Mike118
-
- Administrateur
-
- 9â¯986 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 24 avril 2012 - 02:31
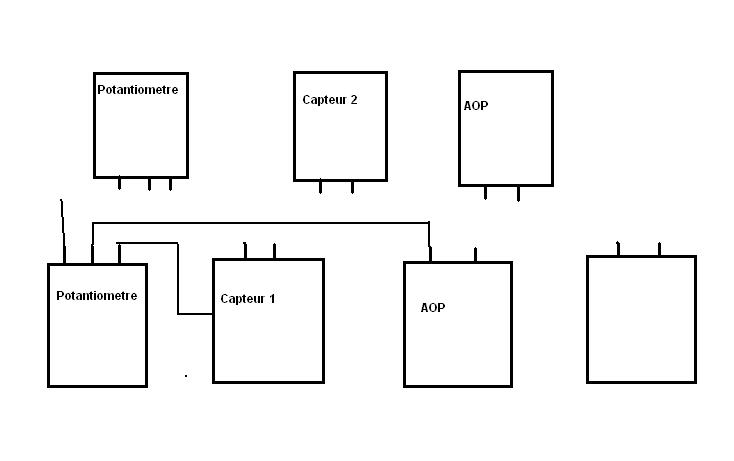
Un truc comme sa ? tain je comprend que dalle
plus ou moins ... Car je ne vois pas les sorties de tes boites... et puis tu ne dois pas faire de boite pour les capteurs mais tu dois faire 2 boite "ou" Refais des boites comme on l'a fait la dernière fois mais fais en une par une,
entrée à droite, sortie à gauche et nomme les entrée et sorties ... Lis mes précédents post toute les réponses sont dedans .
as tu compris la fonction "ou" ? as tu compris comment fonctionne un comparateur simple avec des aop ? as tu compris comment fonctionne ce que je te propose dans son ensemble? et donc, as tu compris pourquoi je te propose ça ?
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#92
Mike118
-
- Administrateur
-
- 9â¯986 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 24 avril 2012 - 03:14
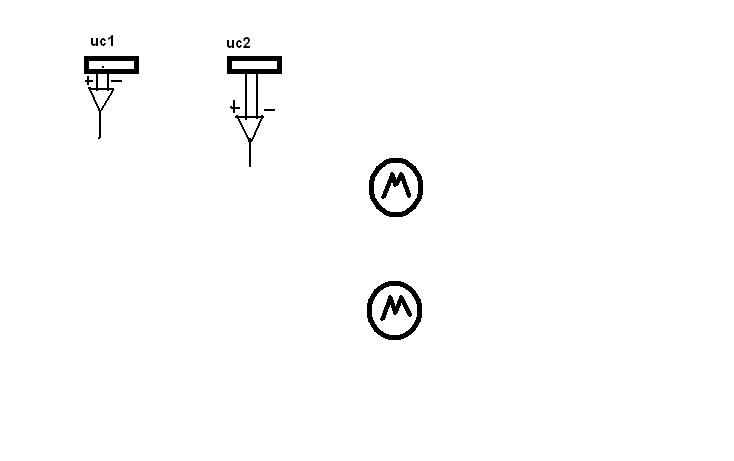
Comme sa ?
c'est déjà beaucoup mieux
par contre espace un peu plus tes boites par ce que sinon tu auras du mal à tout relié ! ^^
ensuite : les 3 aop sont en montage comparateurs
la fonction "ou" avec 2 entrée et une sortie
ça se schématise par une boite avec deux entrées et une sortie.
le role : si l'une ou l'autre des entrées et à +VCC alors la sortie sera ( environ ) à environ 3V
si aucune des entrées est à VCC alors la sortie est à 0V
pour la réalisation retourne voir les liens que j'ai filé dans les précédents posts la tension d'alimentation étant 3V.
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#93
Mike118
-
- Administrateur
-
- 9â¯986 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 24 avril 2012 - 03:18
J'ai pas compris la fontcion "ou". Comparateur sa j'ai pigé et le reste aussi mais ce que je comprend pas c'est comment alimenté et comment brancher les fils sur les AOPs
pour l'alimentation des aop il y a mon post sur l'analogique avec amplificateur opérationnel
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#94
Black Templar
-

- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 24 avril 2012 - 03:28
le role : si l'une ou l'autre des entrées et à +VCC alors la sortie sera ( environ ) à environ 3V
si aucune des entrées est à VCC alors la sortie est à 0V
Faux, avec 3V de tension d'alim, les ampli-op ne seront pas fonctionnels !
Et si c'est pour les utiliser en mode comparateur, il faut utiliser un vrai comparateur à la place (voir LM311)
++
Black Templar
Mon site internet : http://ferdinandpiette.com/
#95
Mike118
-
- Administrateur
-
- 9â¯986 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 24 avril 2012 - 03:43
Faux, avec 3V de tension d'alim, les ampli-op ne seront pas fonctionnels !
Black Templar
la tension d'alim sera +VCC -VCC ( la seule valeur non communiqué
 ) et avec VCC = 3V les amplificateur opérationnels seront fonctionnels
) et avec VCC = 3V les amplificateur opérationnels seront fonctionnels Et si c'est pour les utiliser en mode comparateur, il faut utiliser un vrai comparateur à la place (voir LM311)
++
Black Templar
Tout à fait d'accord ( car tous les électroniciens me le dise ^^ même si je ne sais toujours pas pourquoi ... si tu pouvais me le dire ... car en cours le montage aop en comparateur simple est courant ... ) Et j'allais y venir bientôt ^^ quand il allait avoir fini le cablage des boite ( car en gros un comparateur et un aop en comparateur de toute façon ça fonctionne pareil en théorie ) mais j'allais proposer le LM339AN pour avoir un quad comparateur pour remplacer un quad aop a des prix équivalent ^^
ici un prix et un endroit où on peut commander
http://fr.futureelectronics.com/fr/Technologies/Product.aspx?ProductID=LM339ANNATIONAL9718842&CrossPart=CA339AE
et ici pour une jolie représentation http://www.facstaff.bucknell.edu/mastascu/elessonshtml/Miscellaneous/PinoutLM339.html
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#96
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 24 avril 2012 - 04:09
la tension d'alim sera +VCC -VCC ( la seule valeur non communiqué
( car tous les électroniciens me le dise ^^ même si je ne sais toujours pas pourquoi ... si tu pouvais me le dire ... car en cours le montage aop en comparateur simple est courant ... )
Alors, avec une alim -3V et +3V, tu ton signal de sortie devra être compris entre -1 et 1.5V ... (sauf si tu prend un AOP rail to rail)
C'est tout de même dommage de se priver de 60% de la tension disponible...
Et si tu utilises 2 piles 1.5V, tu auras une alim 0-3V et là, l'AOP ne peut pas fonctionner du tout !!!!!
Avec un comparateur, tu n'as pas ce problème. Comme souvent, les comparateurs sont à collecteur ouvert, il te suffit de mettre une résistance de pull-up en sortie pour travailler, en saturation, avec tes tensions d'alimentations ! Donc si tu alimentes en 0 3V, tes tensions de saturations seront elles aussi 0 ou 3V !
Même mieux, tu peux avoir une alimentation -15V +15V et avoir un signal de sortie à 0 et 5V par exemple ! Cette tension de sortie ne dépend donc plus de tes tensions d'alimentations.
Ensuite, un Amplificateur opérationnel est conçu pour amplifier un signal ! Du coup, il possède, en interne, une compensation en fréquence, ce qui permet d'éviter les oscillations. Du coup, à cause de cette compensation en fréquence, le temps que met l'AOP en comparateur à basculer est long et non calculable. Alors qu'un comparateur branché en comparateur est spécifiquement fait pour comparer ! Le temps de basculement sera défini et fixe.
Du coup, il faut utiliser chaque composant pour ce à quoi il a été conçu ; un amplificateur amplifie alors qu'un comparateur compare.
Un LM311 ou LM339, c'est du pareil au même. (juste le nombre de comparateur dans le boitier qui change)
++
Black Templar
Mon site internet : http://ferdinandpiette.com/
#97
Mike118
-
- Administrateur
-
- 9â¯986 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 24 avril 2012 - 04:16
Merci pour ces précisions =)
justement on en a besoin de 3
@ Newbies bon alors tes boites ça avance ?
Un LM311 ou LM339, c'est du pareil au même. (juste le nombre de comparateur dans le boitier qui change)
++
Black Templar
justement on en a besoin de 3
@ Newbies bon alors tes boites ça avance ?
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#98
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 24 avril 2012 - 04:19
justement on en a besoin de 3
Je ne vois pas à quoi sert le dernier comparateur

J'ai fais un petit schéma de principe avec 2 comparateurs, 2 potars et 2 transistors (un de chaque par moteur), c'est tout !
Par contre, je suis curieux de savoir le type de capteur utilisé ! Parce que je ne vois pas trop comment détecter les murs... (à moins que ce soit des lignes noirs au sol ??)
++
Black Templar
Mon site internet : http://ferdinandpiette.com/
#99
Mike118
-
- Administrateur
-
- 9â¯986 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 24 avril 2012 - 04:37
Je ne vois pas à quoi sert le dernier comparateur
J'ai fais un petit schéma de principe avec 2 comparateurs, 2 potars et 2 transistors (un de chaque par moteur), c'est tout !
Par contre, je suis curieux de savoir le type de capteur utilisé ! Parce que je ne vois pas trop comment détecter les murs... (à moins que ce soit des lignes noirs au sol ??)
++
Black Templar
ah ça c'est très intéressant ! Car j'ai pas réussis à faire ce que tu viens de faire ... Pourtant j'avais cherché ...
Tu as bien ça comme comportement ?
si le capteur de devant détecte rien : j'avance tout droit
si le capteur de devant détecte quelque chose et que le capteur à droite détecte quelque chose je vais à gauche
si le capteur de devant détecte quelque chose et que le capteur à droite rien je vais à droite
Bon c'est sur qu'on peut placer les capteurs autrement et donner d'autre ordre ( faire genre le cocotix ^^ ) voir le faire avec un seul capteur mais c'est Newbies qui m'a donné ce comportement ! ( et vu que je ne veux pas tout faire ^^ )
pour le capteur on est resté sur les capteur infrarouge je les connais et il marchent plutôt bien
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#100
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 24 avril 2012 - 04:47
si le capteur de devant détecte rien : j'avance tout droit
si le capteur de devant détecte quelque chose et que le capteur à droite détecte quelque chose je vais à gauche
si le capteur de devant détecte quelque chose et que le capteur à droite rien je vais à droite
C'est parce que je ne vois pas les choses de la même façon.
Pour moi, il n'y a que deux capteurs : gauche et droite.
Lorsque le capteur gauche détecte un mur, le moteur gauche tourne (pour que le robot tourne à droite)
Lorsque le capteur droit détecte un mur, le moteur droit tourne (pour que le robot tourne à gauche)
Si les 2 capteurs détectent un mur, les 2 moteurs tournent et le robot va tout droit

Pour l'arrêt, on pourrait éventuellement ajouter un micro-rupteur à l'avant qui arrête le robot lorsqu'il est enclenché.
Ce qui veut dire que le robot sarrêtera s'il est dans un cul de sac.
Comme d'après le schéma de Newbies, le seul cul-de-sac, c'est la fin du parcourt, tout est parfait
Ok, sachant qu'il faut surement des capteurs IR qui détectent à moins de 10cm (car le plateau n'est pas très grand)pour le capteur on est resté sur les capteur infrarouge je les connais et il marchent plutôt bien
++
Black Templar
Mon site internet : http://ferdinandpiette.com/
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




