Et la fin du circuit n'est pas un cul de sac je crois que vous avez mal compris le plan du circuit la partis achuré n'est pas la fin la fin c'est la ou il y a marqué arrivé ( logique ^^ )
Les boites sa avance bof bof je comprend pas trop le "ou"

Membre passionné

Posté 24 avril 2012 - 05:04
Membre

Posté 24 avril 2012 - 05:40
Et la fin du circuit n'est pas un cul de sac je crois que vous avez mal compris le plan du circuit la partis achuré n'est pas la fin la fin c'est la ou il y a marqué arrivé ( logique ^^ )
Mon site internet : http://ferdinandpiette.com/
Staff Robot Maker

Posté 24 avril 2012 - 05:45
Galère galère...
 mais il y a plein de façon différente de faire : perso moi j'aurais fais avec un seul capteur à 45 ° .. du moins je te le conseil ...
mais il y a plein de façon différente de faire : perso moi j'aurais fais avec un seul capteur à 45 ° .. du moins je te le conseil ... Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Staff Robot Maker
Posté 24 avril 2012 - 05:51
C'est à dire que tu as accès au départ depuis l'arrivée ? Le circuit reboucle sur lui-même ? Tu peux donc enchainer les tours de circuits ?
Si c'est le cas, c'est dommage car ça complique un poil l'électronique.
Tu places deux capteurs : un à gauche et un devant.
Si on ne détecte rien devant, on va toujours tout droit.
Si quelque chose est détecté devant et rien à droite, on va a droite
Si quelque chose est détecté devant et à gauche, on va a gauche.
De manière logique, on a
moteur droite = rien en avant ou rien à gauche
moteur gauche = rien en avant ou quelque chose à gauche
Ce qu'il faut faire, c'est tout de suite convertir les signaux de tes 2 capteurs en signaux logiques tout où rien à l'aide des comparateurs.
Ensuite, tu appliques tes fonctions logiques sur ces signaux pour commander les moteurs (à l'aide d'un transistor).
Comme il existe des circuit intégré tout fait pour la fonction logique "non et", je te conseil de les utiliser !
Ainsi, avec 3 portes "non et", ça te donnes :
moteur droite = détection avant NON ET détection à gauche
moteur droit = détection avant NON ET rien à gauche
Astuce : rien à gauche = NON détection à gauche = détection à gauche NON ET détection à gauche
ça te fait un montage avec :++
- 2 potentiomètres pour régler le seuil de détection des capteurs
- 2 comparateurs pour avoir un signal binaire "Oui, je détecte un mur" ou "Non, il n'y a pas de mur"
- 3 portes NON ET pour savoir le les moteurs tournent ou non
- 2 transistors pour commander les moteurs à partir des des signaux logiques "oui ça tourne" et "non ça ne tourne pas"
Black Templar
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre
Posté 24 avril 2012 - 05:54
@ Black Templar avis perso : tu crois vraiment que 2 comparateur 3 NON ET est mieux que 3 comparateur 2 OU ?
perso moi j'aurais fais avec un seul capteur à 45 °

Mon site internet : http://ferdinandpiette.com/
Staff Robot Maker
Posté 24 avril 2012 - 06:04
Oui car tu économises un capteur
Sauf qu'ici, il y a un problème quand il y a un mur devant et un mur à gauche (si le capteur est sur l'avant gauche). Ton robot foncera dans le mur
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre
Posté 24 avril 2012 - 06:10
hum moi j'en utilise 2 pour le montage que je propose ... toi tu en utilise combien ?
Ok, comme ça je veux bien. Il faut juste que le capteur soit bien sur l'extrémité d'un coin du robot.hum je suis pas sur : tu mets deux consigne : la distance d < à la distance D et tu vise à 45 ° à gauche
ordre : si la distance mesuré est supérieur à D tu vas à gauche ( car on est trop loin du mur gauche et donc on peut percuter le mur droit )
si la distance mesuré est inferieur à d tu vas à droite ( car il y a soit mur droit devant soit le mur est trop près à gauche )
sinon tu continu tout droit
et il me faut quoi? : deux comparateur deux transistors un seul capteur ...
Mon site internet : http://ferdinandpiette.com/
Staff Robot Maker
Posté 24 avril 2012 - 06:18
Bon, je te laisse expliquer ta solution à Newbies ^^
++
Black Templar
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 24 avril 2012 - 09:08
ben ça avance
pour le "Ou " ...
si tu me dis que tu as pas compris le principe de la fonction ou si tu me demande de reéxpliquer , alors je te fous une claque !
c'est le même principe pour répondre à ce que tu as demandé
à savoir :
si le capteur de devant détecte rien : j'avance tout droit => moteur droit "on" moteur gauche "on"
si le capteur de devant détecte quelque chose et que le capteur à droite détecte quelque chose je vais à gauche => moteur droit "on" moteur gauche "off"
si le capteur de devant détecte quelque chose et que le capteur à droite rien je vais à droite=>moteur droit "off" moteur gauche "on"
en effet : trouve moi une phrase qui donne les conditions possible pour que le moteur droit soit allumé idem pour la condition sur le moteur gauche .
une erreur pour l'instant: le "ou" se fait après les comparateurs relis les post précédent :
tu dois faire
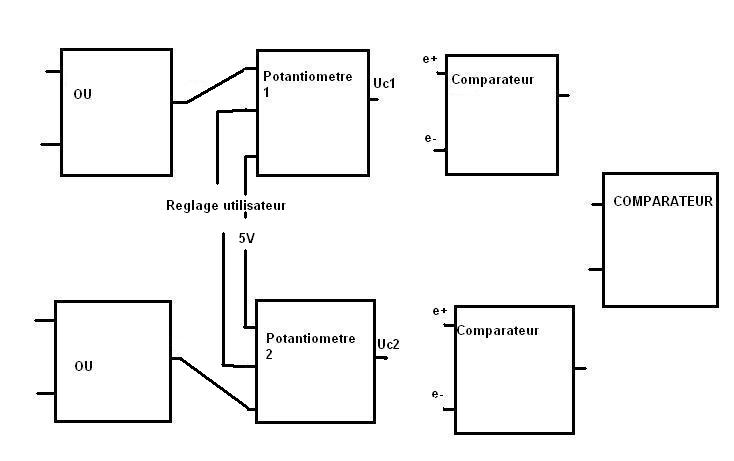
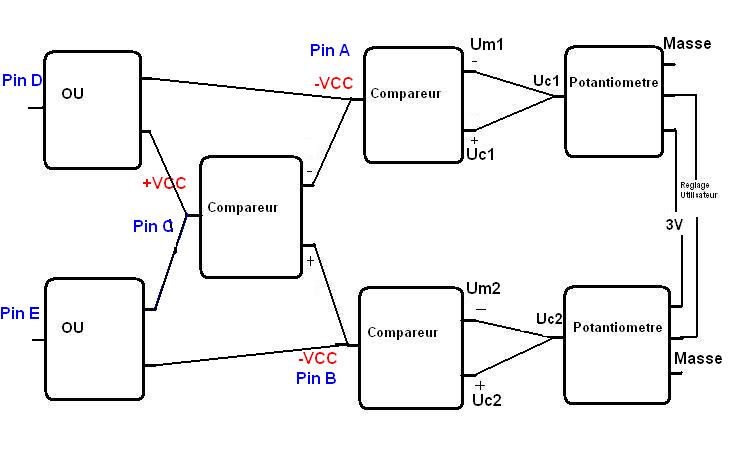
- 2 tensions variables réglable par potentiomètre Uc1 et Uc2 ( il faut savoir faire un pont diviseur de tension avec un potentiomètre, tu sais le faire? )
- d'avoir une pin A à -VCC si on est trop près du mur d'après le capteur 1 défini pour Um1=Uc1 et +Vcc si on estime qu'on est assez loin ( +-VCC en sortie ? tien mais qu'est ce qui peut faire +-VCC en sortie ? et il y a quoi comme entrée ? )
- d'avoir une pin B à -VCC si on est trop près du mur d'après le capteur 2 défini pour Um2=Uc2 et +Vcc si on estime qu'on est assez loin ( +-VCC en sortie ? tien mais qu'est ce qui peut faire +-VCC en sortie ? et il y a quoi comme entrée ? )
- d'avoir une pin C à +VCC si on est trop près du mur d'après le capteur 2 défini pour Um2=Uc2 et -Vcc si on estime qu'on est assez loin ( +-VCC en sortie ? tien mais qu'est ce qui peut faire +-VCC en sortie ? et il y a quoi comme entrée ? )
- d'avoir une pin D à environ 2-3V si A est à VCC ou si B est à VCC sinon D est à 0V ( tien mais on lis pas le mot "ou" ici ??? donc en lisant tu comprend qu'en entré on a ???? )
- d'avoir une pin E à environ 2-3V si A est à VCC ou si C est à VCC sinon E est à 0V ( tien mais on lis pas le mot "ou" ici ??? donc en lisant tu comprend qu'en entré on a ???? )
ce qui te fais 7 boites. précise les noms des entrées dans le cas des comparateur ( entrée inverseuse ou non inverseuse)
Sinon la solution de Black Templar peut être envisagé aussi
bon même si ce n'est pas la solution final, fais le et comprend le ... ça t'aidera pour la suite
@ Newbies :j'attendrais que tu répondes à toutes les question en gras italique souligné avant de te donner plus d'aide.
.
Modifié par Newbies, 24 avril 2012 - 09:10 .
Staff Robot Maker
Posté 25 avril 2012 - 02:18
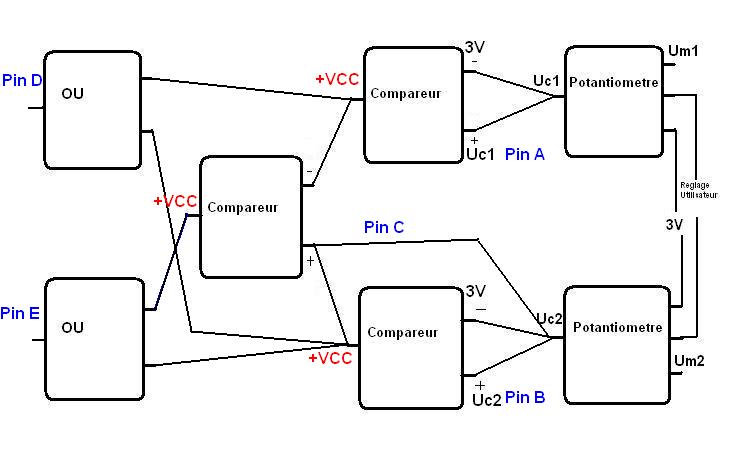
Le moteur droit peut etre allumer si le capteur 1 ne detecte rien ou que le capteur 2 detecte rien. Le moteur de gauche peut etre allumer si le capteur 1 ne detecte rien ou si le capteur 2 detecte un obstacle
Non je ne sais pas faire un pont diviseur avec un potantiometre.
Pour le pin A on a +VCC si on est assez loin du mur et -VCC si on est trop prés. Comme entré je dirais Uc1 et 5V ?
Pour le pin B on a +VCC si on est assez loin du mur et -VCC si on est trop prés. Comme entré je dirais Uc2 et 5V ?
Pour le pin C on a -VCC si on est assez loin du mur et +VCC si on est trop prés. Comme entré je dirais Uc2 et 5V ?
Pour le pin D je comprend que en entré on a +VCC et -VCC
Pour le pin E je comprend que en entré on a +VCC et -VCC
Sinon je voulais juste savoir pour ta solution a un capteur a 45° comment comparer les resultas avec une seule donné
Merci theo
Et les pin D et E c'est bien eux qui dirige les moteurs ?
maitenant tu reprends exactement la même phrase mais tu rédige de manière à utiliser les états + - VCC d'un comparateur donc avec si possible le nom des pin : A,B,C ( rappel : en entré d'un coparateur tu as 2 tension différentes , l'une qui va dans le - l'autre qui va dans le plus si celle qui va dans le - est la plus grande en sortie tu as -VCC si celle qui va dans le plus est la plus grand tu as +vcc et garde en tête que plus tu es près plus la tension mesuré par le capteur est grande ) qui te donneront Uc1 et Uc2 ( éléments en gras à faire ) je répondrais à tes future questions ensuite
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre chevronné

Posté 25 avril 2012 - 10:22
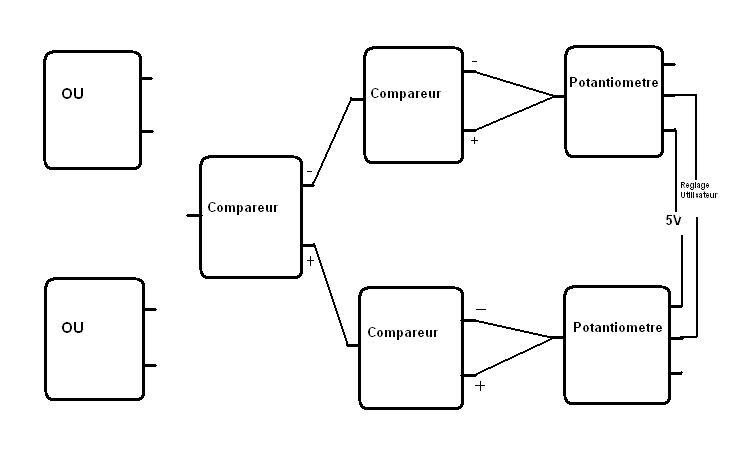
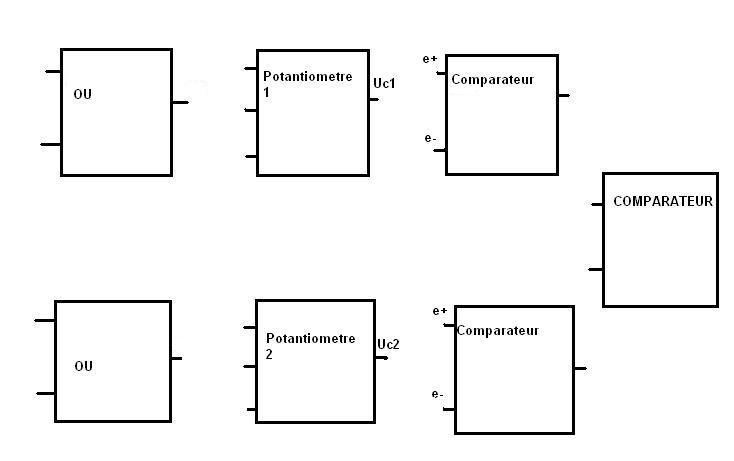
) servent à comparer la tension consigne Uc (réglée par un potentiomètre) à la tension mesurée par le capteur Um... Il y a donc plusieurs choses à rectifier. Essayes bien de comprendre la fonction de chaque "boîte" et les entrées/sortie avant de les relier. Sinon les boîtes en elles-mêmes m'ont l'air bonne (mike118?)
Staff Robot Maker
Posté 26 avril 2012 - 08:32
comme t'a dit mike118, les deux premiers comparateurs (et non-pas compareurs
C'est à ça que servent mes questions il y a encore quelques erreurs mais dans l'ensemble ça commence à ressembler à quelque chose. Si tu relis mes post je t'ai indique toute les entrées et la sortie pour chacune des boites ... et puis tu trouve pas bizarre d'avoir deux entrées au niveau des comparateurs et d'y mettre deux fois la même chose ?? Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Staff Robot Maker
Posté 26 avril 2012 - 08:37
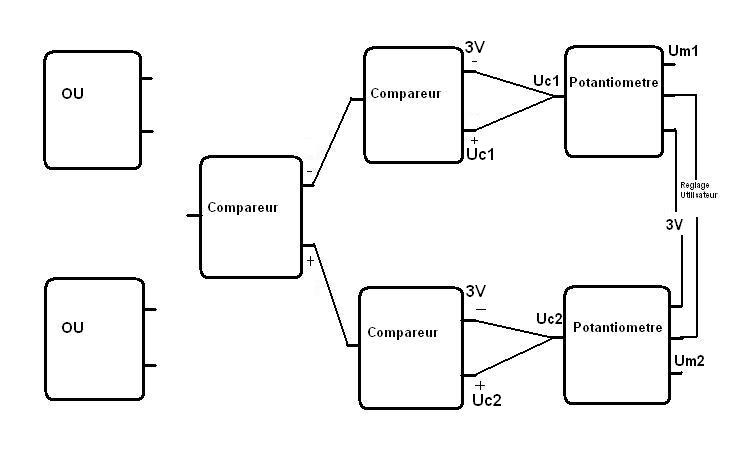
Mais ce que je pige pas c'est que il faut comparé les tensions Uc et Um alors que mike118 a dit dans un de ses message "uc=um"
cepandant comme tu les compare la condition qui change la sortie c'est au moment donné où tu as Uc=Um mais au cours du temps Uc et Um n'ont pas les même valeur ! j'ai été clair ?
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre chevronné
Posté 26 avril 2012 - 11:46










0 members, 2 guests, 0 anonymous users