Ca me parait assez énorme non ?
Si on veut que les modules soient "assemblables" pour faire des robots plus complexes ils faudraient que les modules soient plus petits. :/
Si tu prends 7 cm de côté pour le carré ça signifie que les "roues" ne seront pas centrées. Je pense qu'il faudrait essayer de bricoler une roue pour pouvoir mettre le moteur dans le sens de la longueur plutôt que dans celui de la largeur.
Après 12cm par côté, je ne pense pas que l'on puisse faire moins. Par contre, 10 cm sur le tronc centrale me paraissent beaucoup. La moitié suffirait non ?
Enfin, dis moi ce que t'en penses ^^
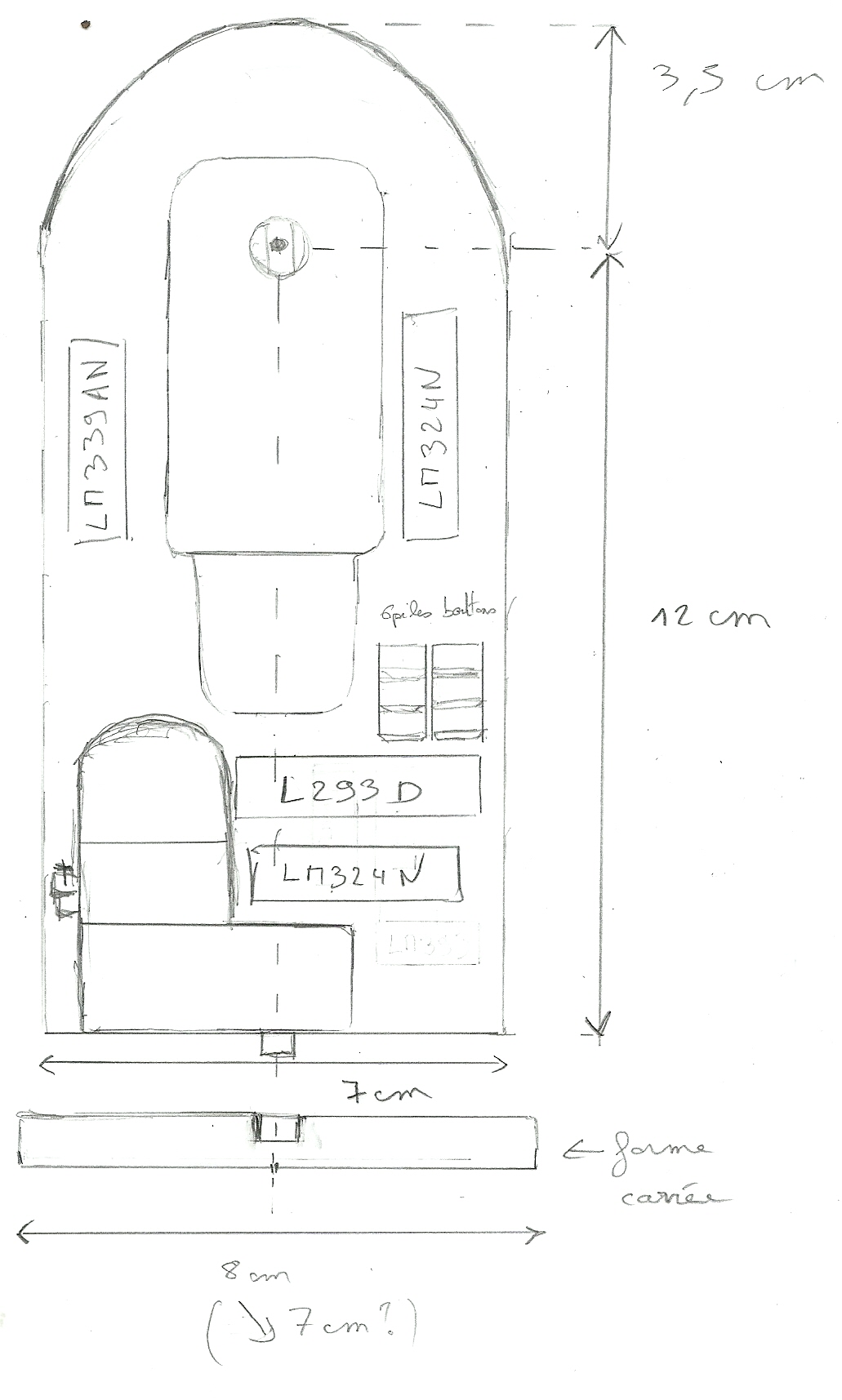
Oui en effet ça me parait assez gros en effet ...mais avec les moteurs qu'on avait pré choisis c'est difficile de faire plus petit en voulant garder les axe des moteurs dans un même plan et sans rajouter d'étage de réduction. Et donc avec ces dimensions les roues sont centrés...
Ensuite la longueur du tronc centrale est définie par la largueur du carré qui va être en rotation : la plus grande longueur étant la diagonale environ légèrement inférieur à 10 cm = ( 7cm * racine de 2 ) et comme il ne faudrait pas que les carrés se cognent ... => 10 cm d'entre axe.
Je joint un dessin pour te montrer les contraintes que j'ai pris en compte ... il faudrait revoir ce dessin , prendre en considération d'autres éléments : rajouter un étage de réduction fait maison ?
Il y a des truc en plus n'y fais pas attention ^^
Donc visiblement faut changer certaines choses ... mais si il y a un truc qu'on peu réduire c'est les 12cm en prenant un servo ...
J'attend des commentaires
 ( et je continu à en rédiger pour les autre parties de ton message ^^ ) Il faudrait surrement revoir le choix des moteur et de leur forme etc... genre prendre que les coudées ?
( et je continu à en rédiger pour les autre parties de ton message ^^ ) Il faudrait surrement revoir le choix des moteur et de leur forme etc... genre prendre que les coudées ? PS : le dessin c'était juste pour avoir un aperçue d'une solution possible ^^
je l'ai fait à l'echelle 1 mais comme il a été numérisé ^^ regarde l'échelle indiqué sur le doc par les dimension présentes ^^
-