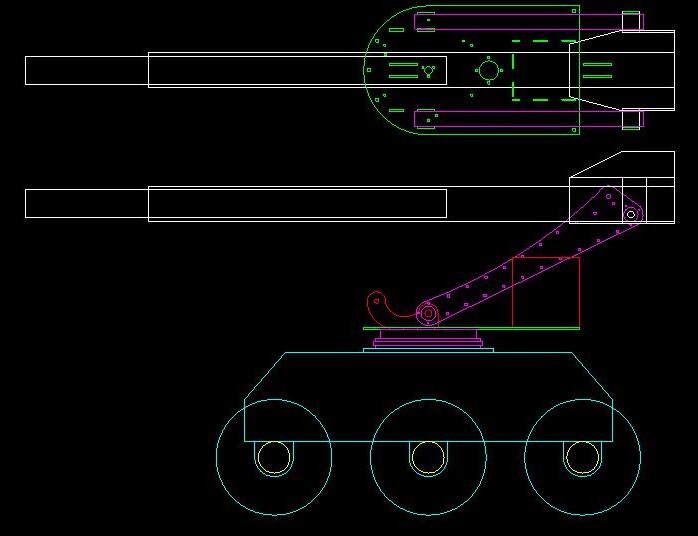
Les roues sont toutes de même tailles : le diamètre extérieur (avec pneu !) est de 33cm (13").
Il y a une paire de jante à 4 trous, je prévoyais de l'utiliser sur la parte centrale du châssis, maintenant que le châssis est en une seule partie je ne sais pas trop.
La suspension serait pas mal mais c'est compliqué à mettre en place. Sur ta deuxième vidéo, le châssis est articulé, un peu comme je voulais faire.
Je vais rester sur une solution simple à 6 roues sans suspension et sans châssis articulé. Le robot sera très lourd, compté environs 250Kg avec sa charge mais le budget ne cesse de diminuer  .
.
Edit : effectivement les roues sont assez proche du châssis, cela vient du fait que j'avais imposé une contrainte sur la largeur du robot en début de projet et bien que je n'ai plus cette contrainte j'ai laissé aussi peu d'écartement parce que je ne veux pas le faire trop large et fragiliser cette partie et aussi parce que je n'avais pas mesuré la largeur réelle des jantes, ça va être revu.










 , la rouille n'est qu'en surface donc un bon nettoyage (sablage/meulage) pour enlever la peinture et la rouille puis un peu de peinture antirouille pour les protéger en les rendre plus belles.
, la rouille n'est qu'en surface donc un bon nettoyage (sablage/meulage) pour enlever la peinture et la rouille puis un peu de peinture antirouille pour les protéger en les rendre plus belles. ), les axes (enfin j'espère en avoir assez), les paliers et les moteurs.
), les axes (enfin j'espère en avoir assez), les paliers et les moteurs.