Je pensais meuler la partie du roulement qui dépasse, mais c'est impossible je risque de détruire l'étanchéité du roulement, j'ai peut-être une autre solution.
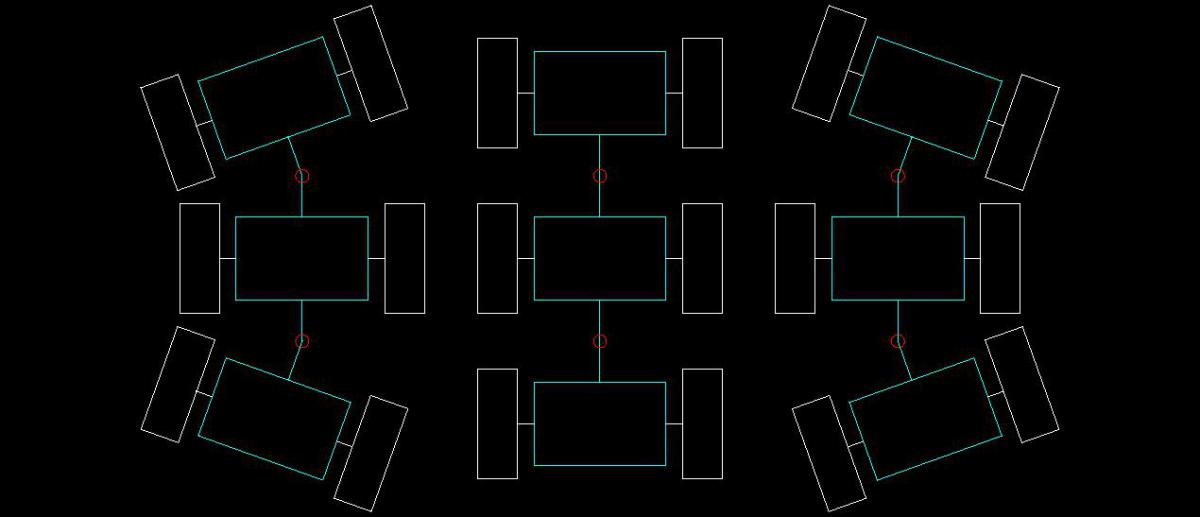
La rotation de la nacelle va devoir subir une petite modif, avec le l'épaisseur du nouveau pignon 240d et les rondelles que je vais devoir ajouter, la partie centrale en alu de 40mm d'épaiseur n'est plus assez épaisse  .
.
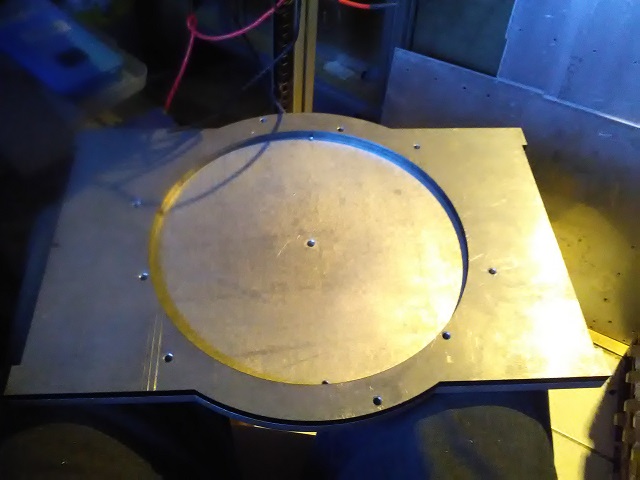
Dans un premier temps je vais utiliser des rondelles pour combler le vide, en attendant de pouvoir faire faire un disque de l'épaisseur nécessaire.


 .
.