Mon contenu
Mon contenu Homme
Homme







Salut 
Désolé, j'ai mis du temps.
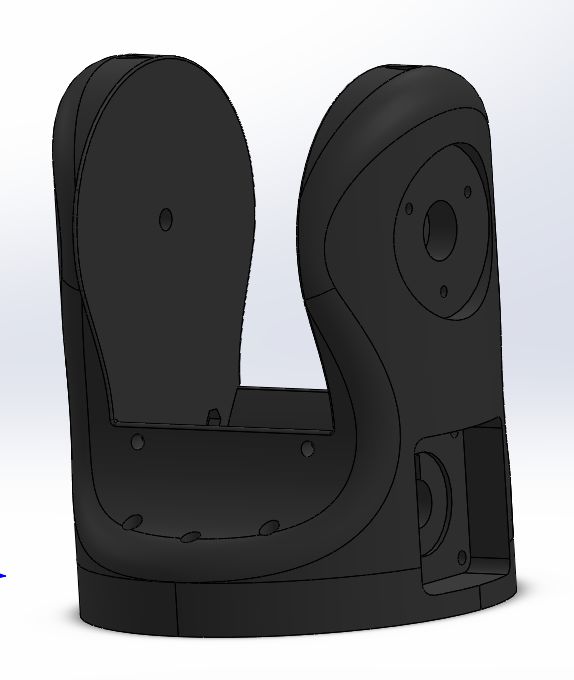
Bien avancé sur le socle et le câblage.
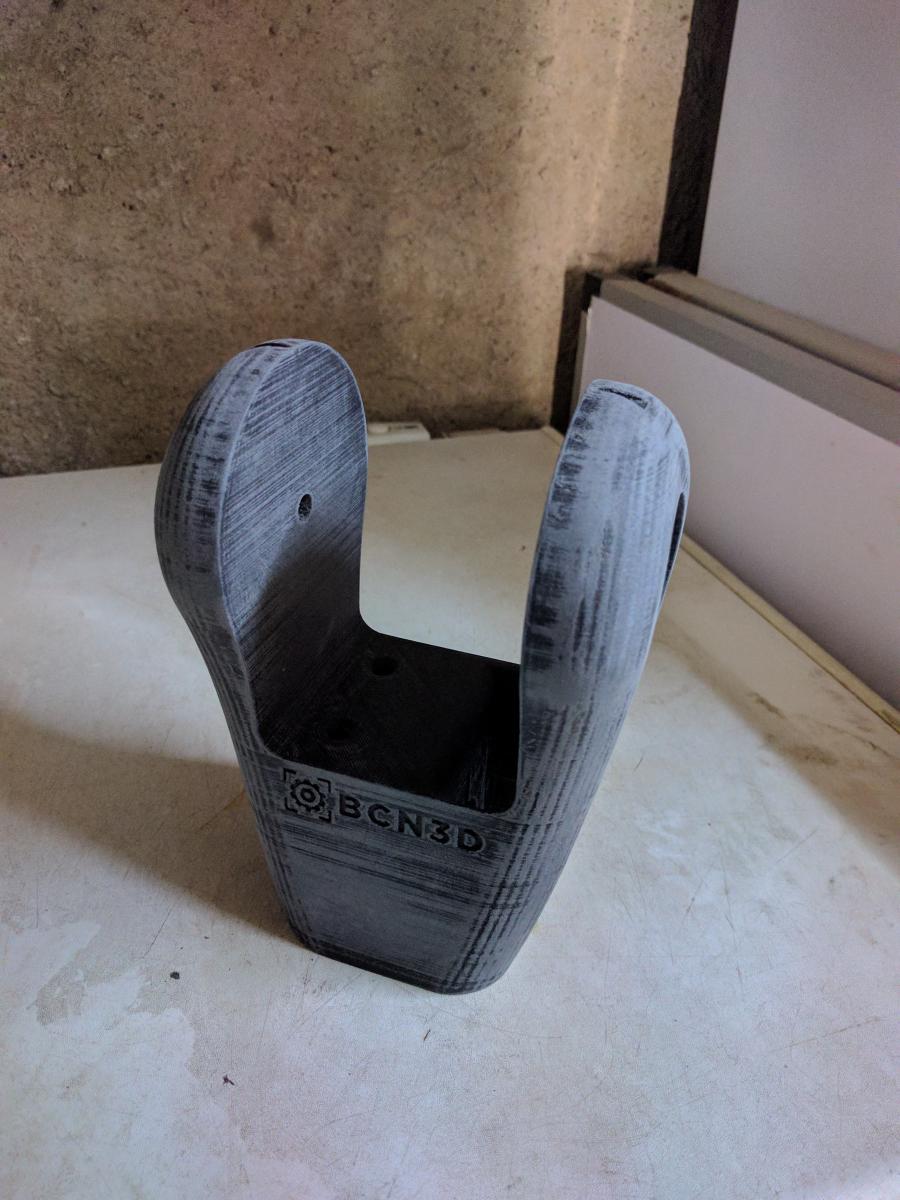
Pour le socle, j'ai finalement opté pour une base ronde avec un décrochement pour le moteur de rotation.

Le robot a l'air stable.


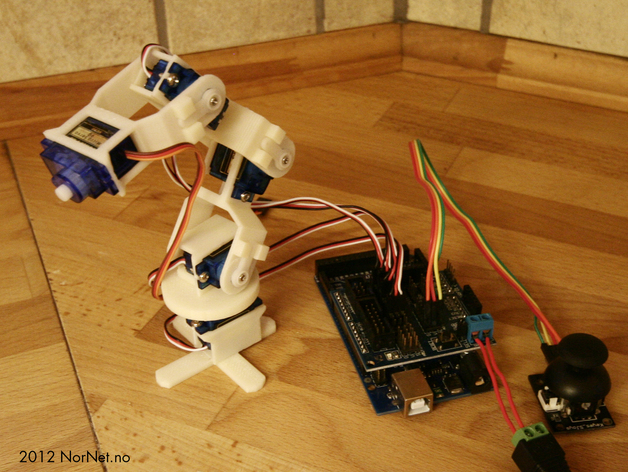
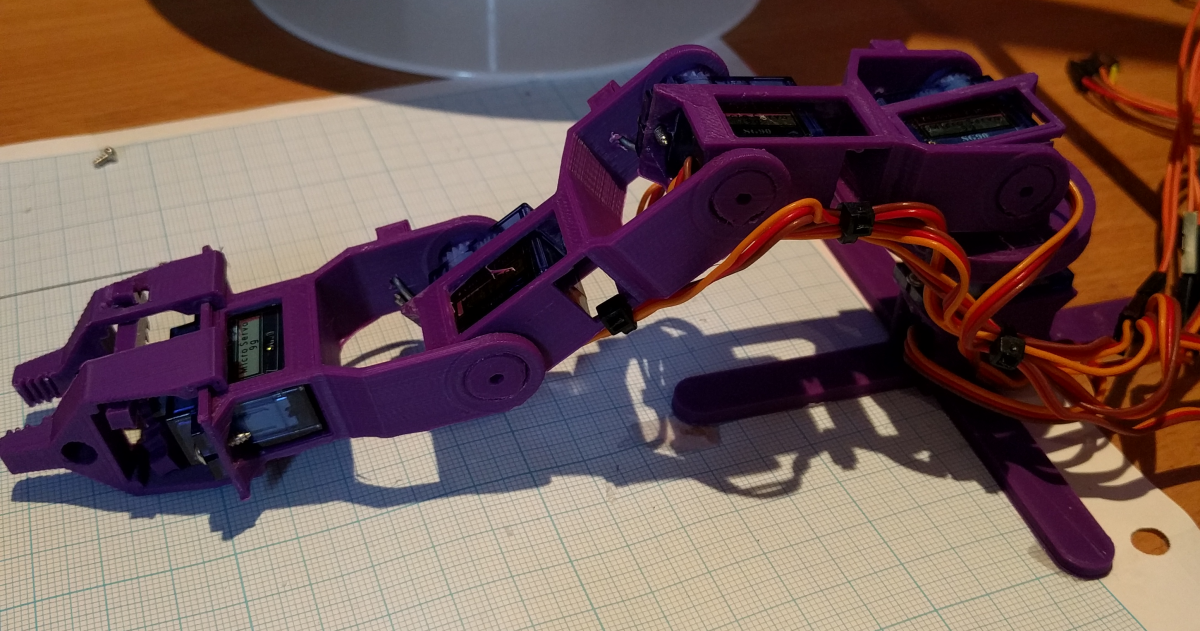
J'ai également monté le servo de la pince :

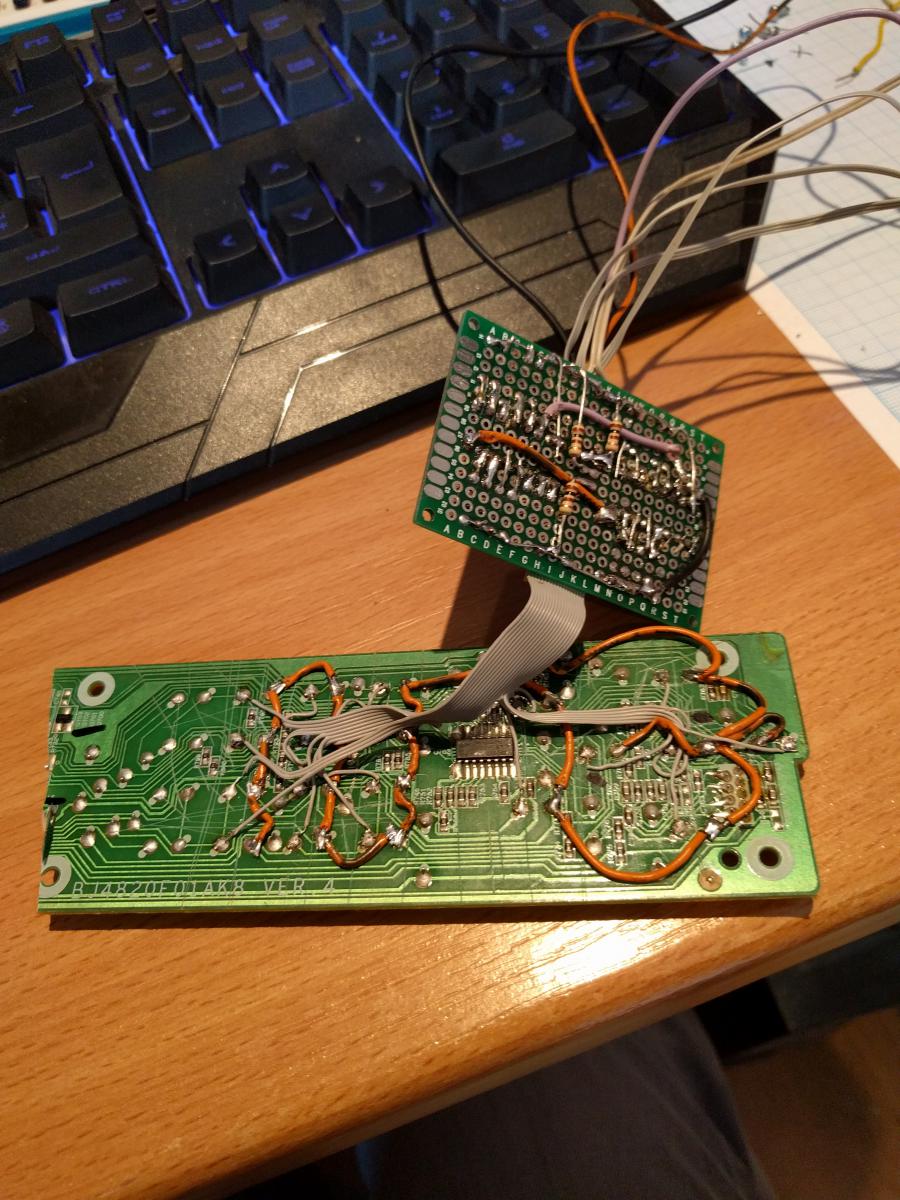
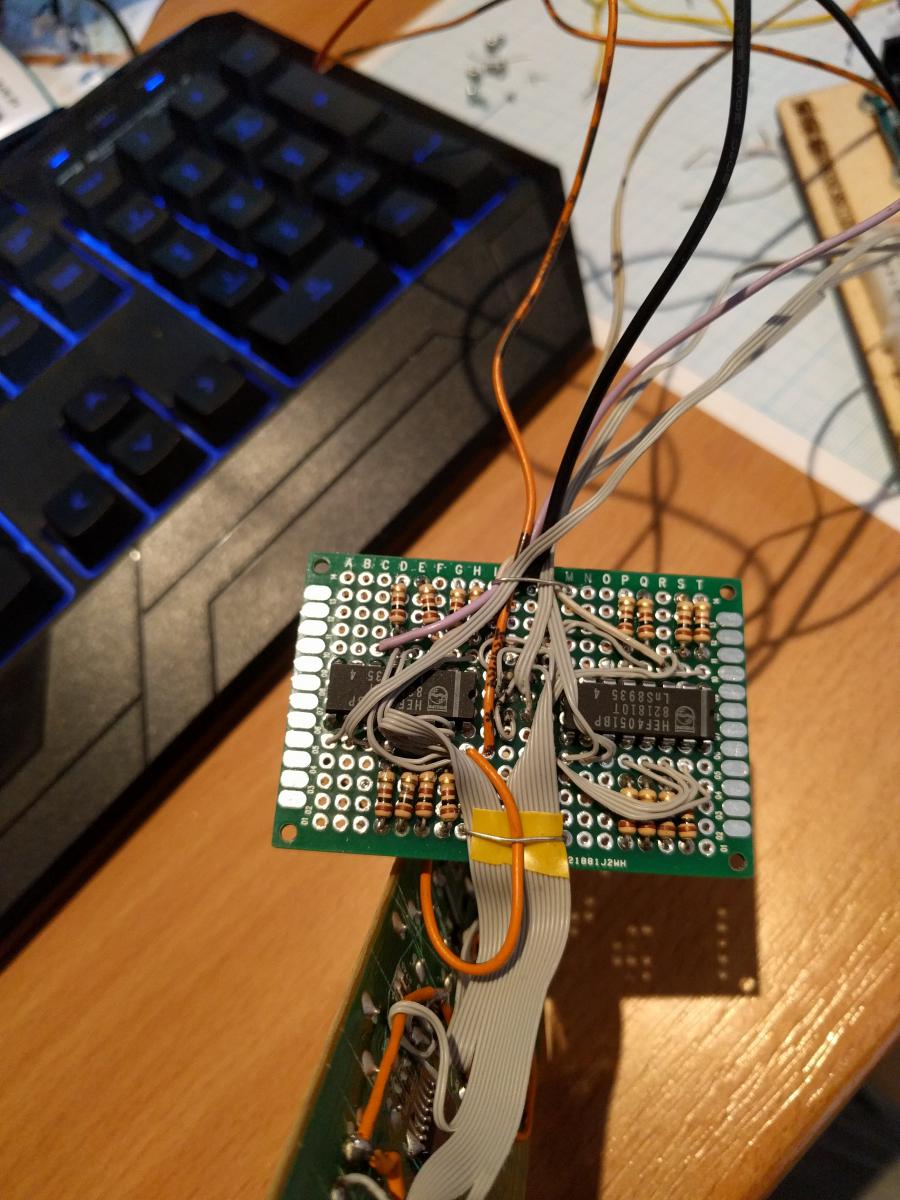
Voici les branchements :

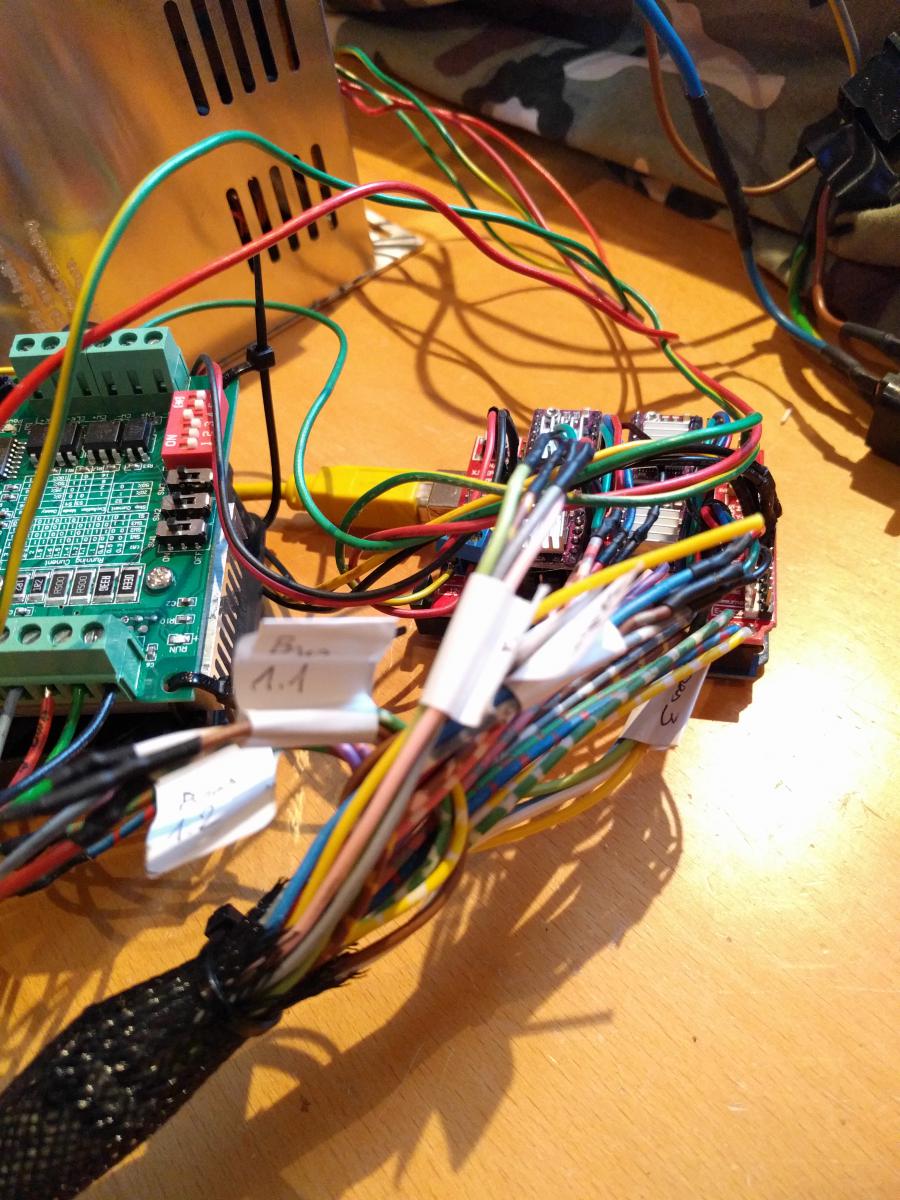
Il faudra que j'imprime un petit boitier pour tous accueillir.
Et voila le coté éléctronique (en attente d'un boitier):









 )
)