 Mon contenu
Mon contenu Homme
Homme







D'où ma recherche de petits engrenages modulables en kit. Mais tout de même assez costaud pour caler le moteur et non casser les pignons.
Regardes peut être dans les Lego technic

 Posté par
- 01 octobre 2017 - 10:10
Posté par
- 01 octobre 2017 - 10:10
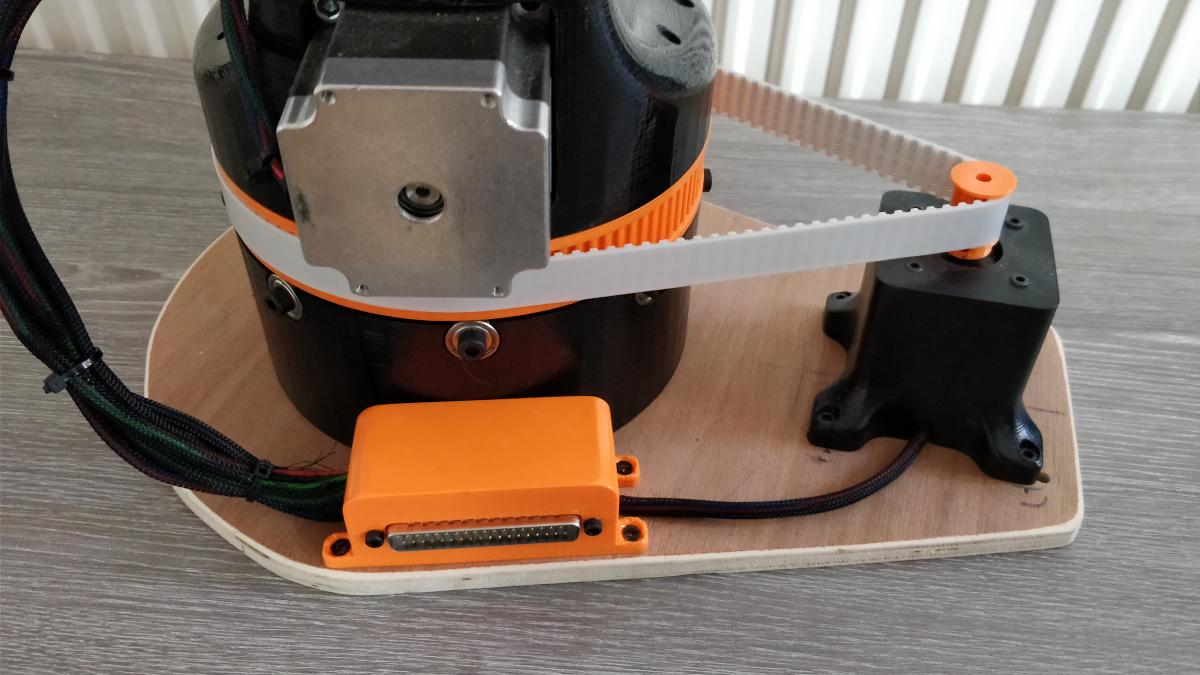
Si tu as la possibilité d'avoir une imprimante 3D, tu peux imprimer des réducteurs sur mesure pour les moteurs pas à pas.
J'ai testé celui-ci pour Nema 17:
https://www.thingiverse.com/thing:8460
C'est un réducteur 5:1
et la je vais tester ça variante, un double réducteur 5:1, ce qui va faire un 25:1 soit 25 fois plus de couple :
https://www.thingive...m/thing:1743732
C'est pour le monter sur mon bras robot : http://www.robot-maker.com/forum/topic/11216-bras-robot-bcn3d-moveo/
Posté par
- 30 septembre 2017 - 11:17
Aujourd’hui, je vais essayer de mettre au point un petit algorithme qui va me permettre d'avoir des mouvements plus fluide.
En gros, actuellement lorsque tous les axes bougent en même temps, certains finissent leurs mouvements avant les autres vu qu'ils ont moins de trajet à faire (voir la fin de ma vidéo). Donc la je vais me baser sur l'axe qui à le plus de trajet à faire pour lui attitrer sa vitesse maximum tandis que pour les autres, la vitesse sera réduit de manière proportionnel afin que les mouvements finissent tous en même temps.
Posté par
- 27 septembre 2017 - 07:22
Une imprimante 3D c'est juste génial comme machine à la maison. A condition de savoir l'utiliser.
Tu peux imprimer des pièces sur-mesure pour ton mobilier, comme des portes-serviettes adapté à tes poignées. Différents supports.. support d'écran, de portable, etc...
Réparer des pièces casser.
Tu peux également faire des projets complet avec l'imprimante.
Voici mon Bras robotique : http://www.robot-maker.com/forum/topic/11216-bras-robot-bcn3d-moveo/
Posté par
- 24 septembre 2017 - 07:09
Salut, voila la vidéo tant attendu des premiers mouvements "officiel" du robot.
J'y montre une partie de mon menu et son fonctionnement.
L'initialisation du robot au début de la vidéo est en faite la mise en place de chaque axe dans leur position zéro, c'est à dire lorsque les flèches des différents éléments sont alignées (comme le robot est positionné en gros). Grâce à ça, je défini la position zéro de chaque moteur.
Il y a encore de nombreux bugs que je résous tout doucement.
Posté par
- 17 septembre 2017 - 09:19
Mise en place de interrupteur générale de l'alimentation :

et du boitier de la prise coté robot :
Posté par
- 17 septembre 2017 - 08:59
Salut, je récupère l'état des touches de cette manière : (le "readAnalogMux" est une fonction qui me récupere le multiplexage des boutons)
boolean etatOK = readAnalogMux(0)>500; boolean etatFlecheBas = readAnalogMux(4)>500; boolean etatFlecheHaut = readAnalogMux(6)>500; boolean etatRetour = readAnalogMux(7)>500; boolean etatMaison = readAnalogMux(3)>500;
(je sais que "0" est le bouton OK, le "4" la flèche du bas, etc...)
En gros, je suis en train de faire un mode manuel pour faire bouger chaque articulation de manière indépendante. Je souhaiterai donc avec mon clavier numérique, taper une valeur (qui ne dépassera pas un nombre à 3 chiffres) pour donner un angle positif ou négatif à mon articulation.
Si je veux faire tourner mon articulation de 2°, si c'est possible de taper juste sur la touche "2" du clavier et non pas "002", c'est même mieux.
Ou bien tu fais une validation de nombre une fois que le nombre souhaité est tapé ? genre "2" puis "5" puis "4" puis " x " ( ou tout autre caractère au choix ) ?
J'étais parti sur ce système la mais on peut aussi utiliser une touche pour effacer si on veux modifier, peut importe.
@Oracid, j'ai réussi à réutiliser un beau clavier sur lequel j'ai récupéré l'appui de chaque touche, autan ne pas s'en priver 
Posté par
- 16 septembre 2017 - 01:13
En plus du fonctionnement PC ou SD, il y a octoprint. Il te faut "juste" ajouter un raspberry au port USB de ton imprimante. Il remplace le PC pendant l'impression et apporte pas mal de choses en plus. Son interface web te permet de piloter ton imprimante et déposer tes fichiers avec un simple glisser/déposer. C'est complètement optionnel, tu peux prévoir de l'installer après la fin de la construction.
J'avais testé la chose il y a un petit moment. J'en étais content. http://www.robot-maker.com/forum/topic/10545-octoprint-sur-rasbian-avec-la-discovery-200/
J'ai essayé Octoprint mais je préfère Repetier-Server qui fait en même temps la liaison avec Repetier-Host sur le PC en plus de l'interface Web.
Posté par
- 14 septembre 2017 - 07:28
Posté par
- 08 juin 2017 - 07:02
Posté par
- 26 mai 2017 - 07:44
Au pire, dans le doute de savoir si ça fonctionne bien ou pas, prend un silicone en 230v et tu sera tranquille.
Posté par
- 24 mai 2017 - 08:22
J'espère avoir du temps ce week-end pour avancer sur le bras. J'utilise déjà Al-Kashi pour calculer la cinématique inverse.
Posté par
- 19 avril 2017 - 05:10
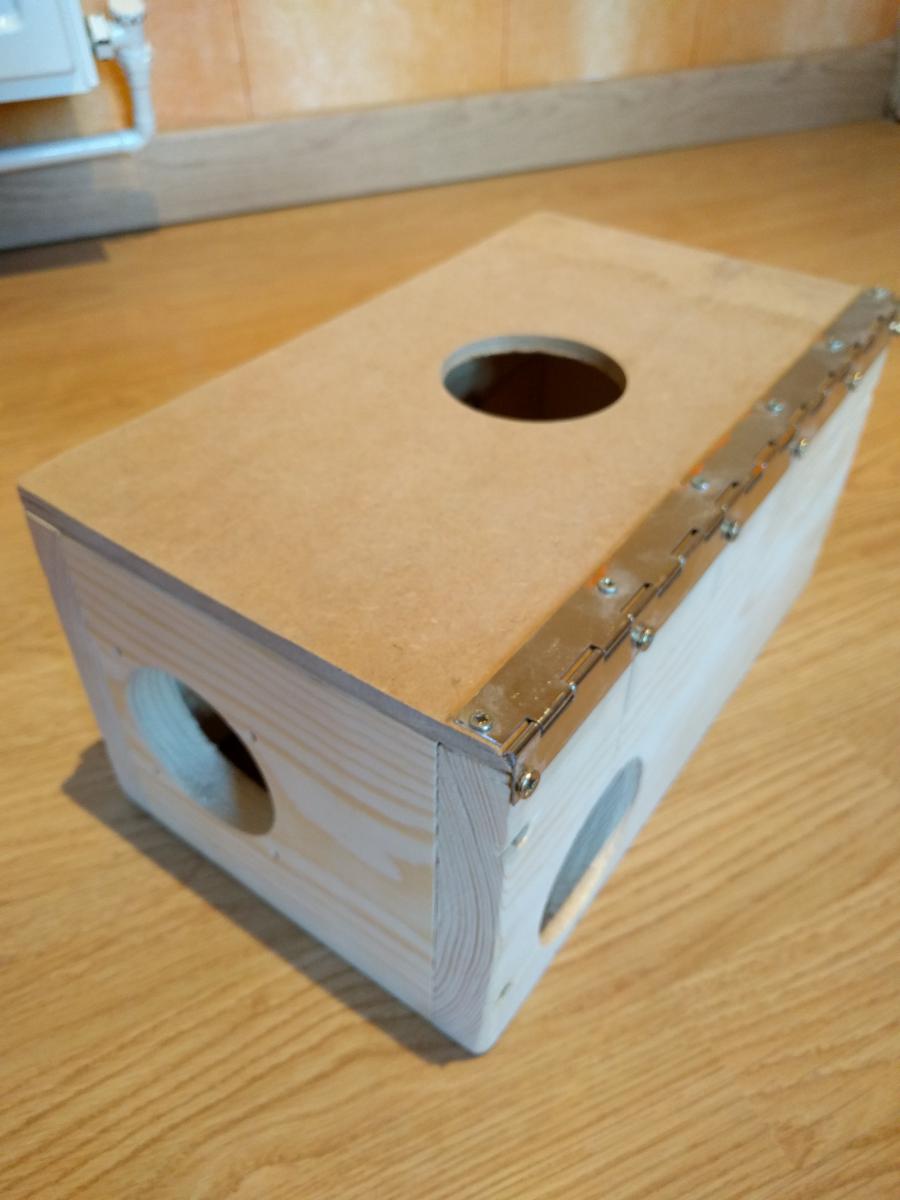
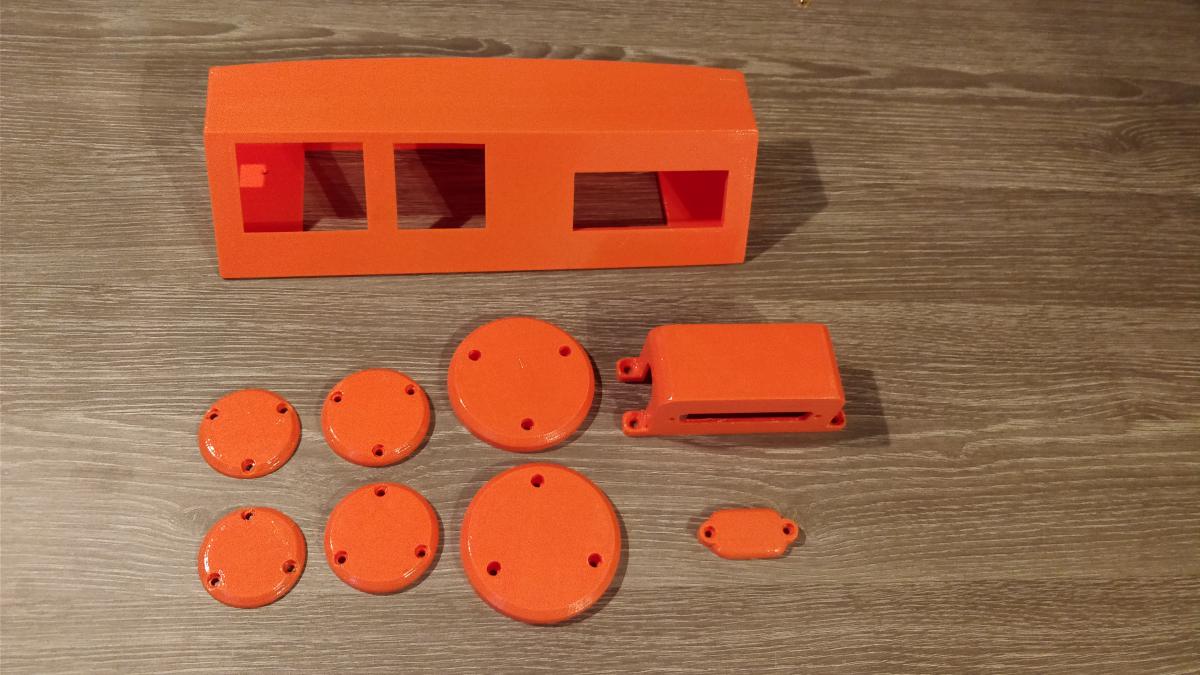
Avec un ami j'ai fabriqué une boite pour l’électronique. Elle n'est pas encore fini mais la voici :
Le trou du dessus sert à passer l'écran et le clavier qui seront maintenu avec une pièce imprimée et le trou tout à droite sera pour le ventilateur de refroidissement.

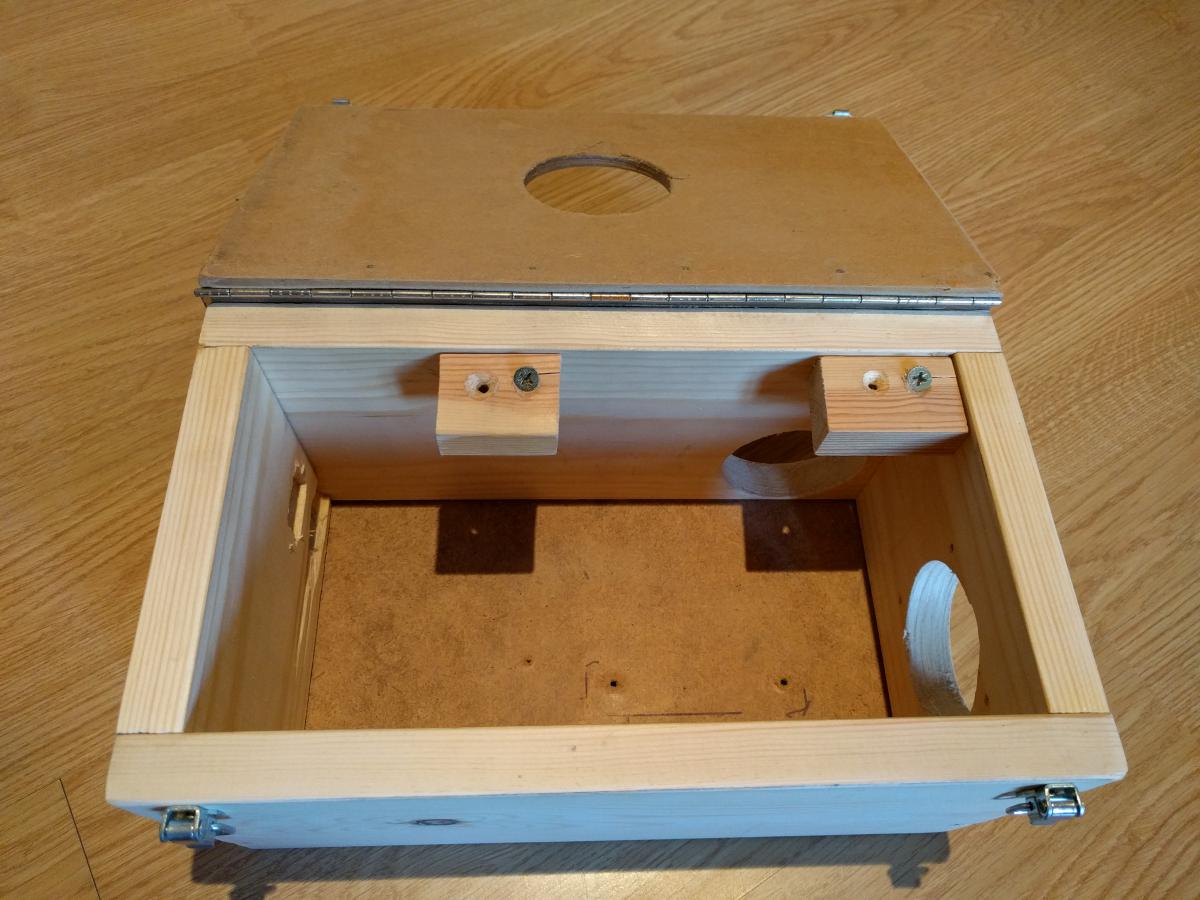
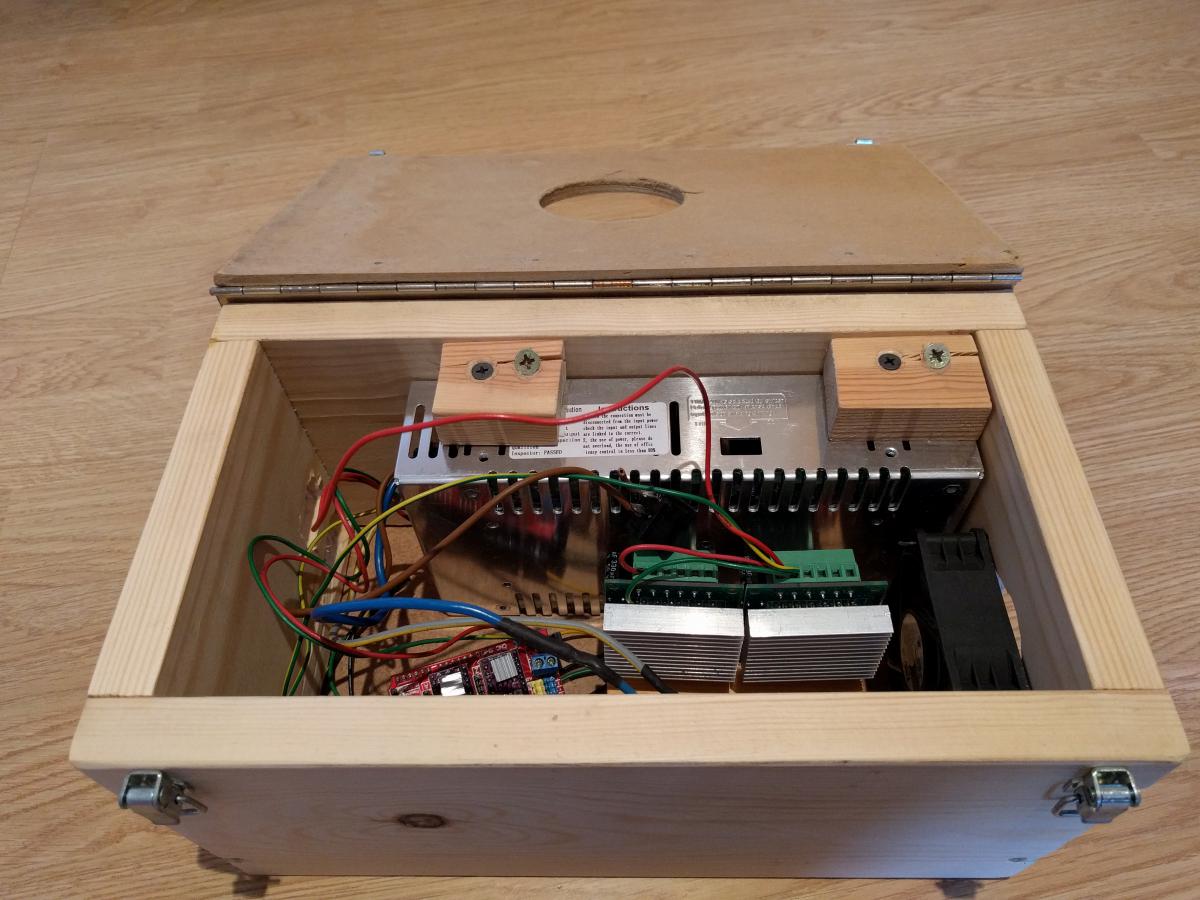
Trous pour l'alimentation et les câbles :


Les verrouillages :








 :
:



