Mon contenu
Mon contenu Homme
Homme





Un petit peu en retard, mais très bon anniversaire.
- Oracid aime ceci
 Posté par
- 16 août 2023 - 10:35
Posté par
- 16 août 2023 - 10:35
Posté par
- 05 juin 2023 - 12:40
Bravo pour ce rover, c'est vraiment magnifique, suberbe travail, vous êtes vraiment de pros
Posté par
- 12 février 2023 - 05:05
Merci Mike,
Il me semblait bien que c'était ici le problème, mais je ne savais pas comment faire. (sans le smartDelay, le GPS ne fonctionne pas)
J'ai modifié mon code et cela fonctionne pas trop mal. Certainement à amélioré.... mais c'est bon
// ----------------------------------------------- Include
#include <Moteurs.h>
#include <Gestion.h>
// ----------------------------------------------- Define
// #define DEBUG
#define AFFICHE
#define GPS
#define COMPAS
#define SDCARD
// ----------------------------------------------- Lidar
/*
vert TX7, blanc RX7, bleu (3)
*/
#include <RPLidar.h>
#define RPLIDAR_MOTOR 3
RPLidar lidar;
const int LIDAR_speed = 255;
float minDistance = 10000;
float angleAtMinDist = 0;
float distOld = 0;
int val = 0;
float Distance[] = {0.0, 0.0, 0.0, 0.0, 0.0, 0.0};
float Angle[] = {0.0, 0.0, 0.0, 0.0, 0.0, 0.0};
bool Ok[] = {0, 0, 0, 0, 0, 0};
String A[] = {"Distance FA : ", "Distance FD : ", "Distance DR : ", "Distance AR : ", "Distance GA : ", "Distance FG : "};
#define FA 0
#define FD 1
#define DR 2
#define AR 3
#define GA 4
#define FG 5
#define FACE 360
#define FACD 45
#define DROI 90
#define ARRI 180
#define GAUC 270
#define FACG 315
#define CONS 4 // Constante
// ----------------------------------------------- Gps
#ifdef GPS
#include <TinyGPS++.h>
TinyGPSPlus gps;
static const uint32_t GPSBaud = 9600;
#endif
// ----------------------------------------------- Compas
#ifdef COMPAS
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_HMC5883_U.h>
Adafruit_HMC5883_Unified mag = Adafruit_HMC5883_Unified(12345);
#endif
// ----------------------------------------------- SDCard
#ifdef SDCARD
#include <SD.h>
#include <SPI.h>
File myFile;
const int chipSelect = BUILTIN_SDCARD;
unsigned long currentTime = 0;
unsigned long previousTime = 0;
#endif
// ----------------------------------------------- Variables
struct SValeursRover
{
float distFA;
float distFD;
float distDR;
float distAR;
float distGA;
float distFG;
char Date[12];
char Time[12];
float distToWP;
float distByOP;
bool Pivote;
float Compas;
float Degres;
float Azimut;
float Latitude;
float Longitude;
int Satellites;
int Difference;
};
struct SValeursRover VR;
// ***********************************************************************
// SETUP
// ***********************************************************************
void setup()
{
#ifdef AFFICHE
Serial.begin(115200);
#endif
//************************************************************************ RPLidar
// Serial7.begin(115200);
lidar.begin(Serial7);
pinMode(RPLIDAR_MOTOR, OUTPUT);
//************************************************************************ Gps
#ifdef GPS
Serial3.begin(GPSBaud);
#endif
//************************************************************************ Compas
#ifdef COMPAS
if(!mag.begin())
{
#ifdef DEBUG
Serial.println("Initialization COMPAS Failed");
#endif
while(1);
}
#endif
//************************************************************************ SDCard
#ifdef SDCARD
if (!SD.begin(chipSelect))
{
#ifdef DEBUG
Serial.println("Initialization SD Failed");
#endif
return;
}
#ifdef DEBUG
Serial.println("Initialization SD Ok");
#endif
#endif
}
// ***********************************************************************
// LOOP
// ***********************************************************************
void loop()
{
AssigneDistances();
Autonome();
#ifdef AFFICHE
Affiche();
#endif
#ifdef SDCARD
currentTime = millis();
if ((currentTime - previousTime) > 3000)
{
previousTime = currentTime;
if (VR.distByOP > 0) // Distance parcourue
{
AssigneGpsCom();
MakeBuffer();
}
}
#endif
}
// ***********************************************************************
// AUTONOME
// ***********************************************************************
// *********************************************************************** Autonome
void Autonome()
{
if (VR.distFA < 300) Serial.println("Stop Avance");
else Serial.println(" - Avance");
if (VR.distAR < 300) Serial.println("Stop Arriere");
else Serial.println(" - Avance");
}
// ***********************************************************************
// FONCTIONS LIDAR
// ***********************************************************************
// *********************************************************************** Lidar
void AssigneDistances()
{
while (val != 5)
{
if (IS_OK(lidar.waitPoint()))
{
float distance = lidar.getCurrentPoint().distance;
float angle = lidar.getCurrentPoint().angle;
bool startBit = lidar.getCurrentPoint().startBit;
byte quality = lidar.getCurrentPoint().quality;
// if (distance > 0 && distance < minDistance)
// if (distance > 0 && quality > 15)
if (distance > 10)
{
val = GetLidar(distance, angle, quality);
}
}
else
{
analogWrite(RPLIDAR_MOTOR, 0);
rplidar_response_device_info_t info;
if (IS_OK(lidar.getDeviceInfo(info, 100)))
{
lidar.startScan();
analogWrite(RPLIDAR_MOTOR, LIDAR_speed);
delay(1000);
}
}
}
if (val == 5)
{
val = 0;
return;
}
}
// *********************************************************************** Lidar
int GetLidar(float dis, float ang, byte qua)
{
if (ang <= FACE && ang > (FACE - CONS))
{
if (!Ok[FA])
{
Distance[FA] = dis;
VR.distFA = dis;
Angle[FA] = ang;
Ok[FA] = 1;
}
}
if (ang <= FACG && ang > (FACG - CONS))
{
if (!Ok[FG])
{
Distance[FG] = dis;
VR.distFG = dis;
Angle[FG] = ang;
Ok[FG] = 1;
}
}
if (ang <= GAUC && ang > (GAUC - CONS))
{
if (!Ok[GA])
{
Distance[GA] = dis;
VR.distGA = dis;
Angle[GA] = ang;
Ok[GA] = 1;
}
}
if (ang <= ARRI && ang > (ARRI - CONS))
{
if (!Ok[AR])
{
Distance[AR] = dis;
VR.distAR = dis;
Angle[AR] = ang;
Ok[AR] = 1;
}
}
if (ang <= DROI && ang > (DROI - CONS))
{
if (!Ok[DR])
{
Distance[DR] = dis;
VR.distDR = dis;
Angle[DR] = ang;
Ok[DR] = 1;
}
}
if (ang <= FACD && ang > (FACD - CONS))
{
if (!Ok[FD])
{
Distance[FD] = dis;
VR.distFD = dis;
Angle[FD] = ang;
Ok[FD] = 1;
}
}
if (Ok[FA] && Ok[FG] && Ok[GA] && Ok[AR] && Ok[DR] && Ok[FD])
{
Ok[FA] = 0;
Ok[FG] = 0;
Ok[GA] = 0;
Ok[AR] = 0;
Ok[DR] = 0;
Ok[FD] = 0;
return 5;
}
else return 0;
}
Posté par
- 22 novembre 2022 - 09:59
Ouais..., Merci pour les vos infos sur la logiques de votre code, mais mes neurones vont avoir de la peine.
Posté par
- 22 novembre 2022 - 11:36
Posté par
- 10 novembre 2022 - 11:16
Magnifique, joli rover, après mes élucubrations actuelles, j'en fabriquerai certainement un.
En tout cas bravo, continue.
Posté par
- 30 septembre 2022 - 11:48
Regarde peut être le forum Taranis
https://frskytaranis...ssible-a-binder
Bon courage
Posté par
- 26 septembre 2022 - 09:40
Oui, tu as tout as fait raison, il est très difficile de trouver des clubs d'aéromodélisme (les drones en font partie) qui acceptent la pratique du drones.
Cela montre, malheureusement, l'ouverture d'esprit des vieux aéromodélistes. (dont je fait parties)
Mais, il y en as. Cherche...
Posté par
- 23 septembre 2022 - 11:38
Salut Oracid,
Plus je lis tes messages, plus je me rends compte que je ne suis pas le seul à vouloir m'affranchir de ces logiciels où tu rentre des coordonnées et que après IL fait tout sans que tu ne fasse plus rien et que tu ne comprends rien.
Lorsque j'ai débuté avec les drones, j'avais acheté le Blade 350 QX de chez Horizon Hobby qui avait un RTH assez fantastique. A chaque fois il revenait se poser à 50 cm. maximum de son point de décollage. Leur logiciels de vols devait être très performant. Pour le reste, ce n'était pas ce que je recherchais ni pour apprendre à piloter, ni pour avancer un peu dans la compréhension des techniques.
Je me suis donc lancer dans la conception et la fabrication de drones.
De 2 " à 10 " une petite trentaine, équipés de BetaFlight et de caméras analalogiques puis HD. Avec lesquels je fait du LR, mais, jamais aucun n'a réussi à se poser (cela vient de BetaFlight), il revient vers le pilote, tu l'entend et cela te permet de te poser en vue direct, où avec les lunettes si tu avait perdu la vidéo.
C'est suite à ces expériences, que comme je te l'ai déjà dis, j'essaye de programmer des rovers qui doivent se rendre d'un point A à un point B, après s'être affranchis des murs, haies, et autre obtacles.
Ce qui n'arrive pas avec un drones, tant qu'il n'y as pas de collines ....
Salutations à tous.
Posté par
- 30 octobre 2021 - 06:12
Bonjour à tous,
Depuis ma présentation le 4 novembre 2020, (une année...) j'ai avancé un petit peu.
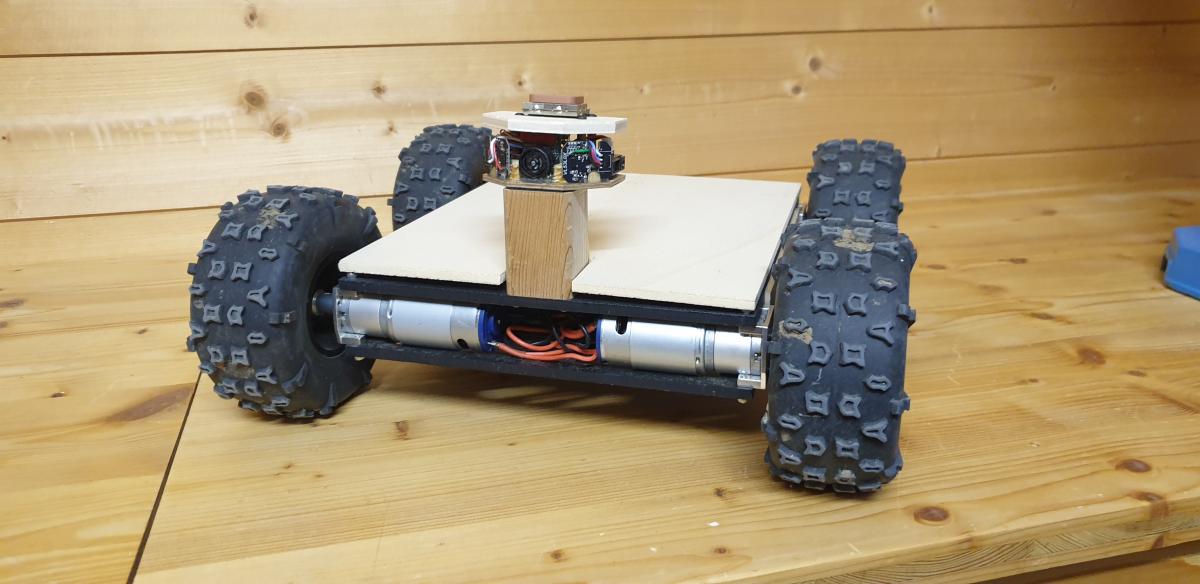
Je vous présente mon dernier Rover
Chassis : Base Prowler
Moteur : Moteurs du Prowler
Contrôleur : Sabertooth
Carte : Arduino Mega
Capteurs :
Face : MAXSONAR
Face droite : VL53LOX
Face gauche : VL53LOX
Droite : SharpIR
Gauche : SharpIR
Ne me demandez pas pourquoi ces capteurs (je les ais presque tous essayé), simplement sur ce modèle ils fonctionnent convenablement.
La configuration ci-dessus lui permet de rouler dans une pièce avec de nombreux obstacles, sans jamais les heurter et à trouver la sortie.
J'y ai ajouter un Compas, un Gps, un écran Lcd et un lecteur de carte Sd.
Avec cette configuration, il est capable (le code est amélioré presque tout les jours) de rejoindre un point GPS, malgré les murs, arbres, haies, plantes ect.
Je ne vous cache pas que je dois de temps en temps, l'aider un peu car il s'est coincé sous une plante, qu'il n'a pas suffisamment détecté.
J'ai oublié de dire que j'ai également implémenté une fonction télécommandé avec un récepteur FrSky, et un retour vidéo en HD avec un système DJI AirUnit.
Je n'utilise pas cette option, rigolo un moment, sans intérêt.
Salutation à tous.