
Bien que non prÃĐcisÃĐ dans la liste des conseils pour programmer avec mÃĐthode, car la page est bien assez remplie, ce serait dommage dans notre cheminement expÃĐrimental de ne pas aborder ce sujet, car forcÃĐment un jour ou l’autre vous risquerez d’en Être la victime. Explications :
PhÃĐnomÃĻne particuliÃĻrement sournois, la collision de PILE survient brusquement sans qu’aucun signe avant-coureur ne nous prÃĐvienne. Pour comprendre de quoi il s’agit, 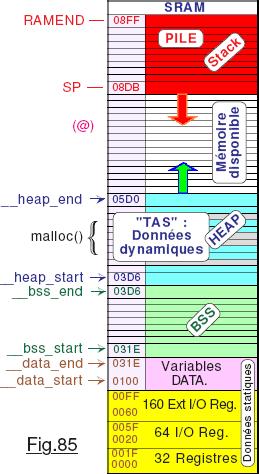 il faut entrer dans la vie intime du fonctionnement des microcontrÃīleurs. Il serait hors propos dans ces lignes d’ÃĐtudier à la loupe l’agencement matÃĐriel de l’ATmega328 et d’en dÃĐtailler finement le fonctionnement interne. Nous allons dans ce chapitre nous en tenir au strict minimum vital.
il faut entrer dans la vie intime du fonctionnement des microcontrÃīleurs. Il serait hors propos dans ces lignes d’ÃĐtudier à la loupe l’agencement matÃĐriel de l’ATmega328 et d’en dÃĐtailler finement le fonctionnement interne. Nous allons dans ce chapitre nous en tenir au strict minimum vital.
Fonctionnement de la mÃĐmoire vive SRAM.
La mÃĐmoire vive (256 + 2Ko) est gÃĐnÃĐralement divisÃĐe en quatre zones :
âĒ Les 256 premiers octets pour les registres gÃĐnÃĐraux du microcontrÃīleur (ReprÃĐsentÃĐe en jaune sur la Fig.85) occupent ÂŦ le bas Âŧ de la SRAM. (En ÂŦ assembleur Âŧ c’ÃĐtait la Page zÃĐro Âŧ.)
âĒ La zone nommÃĐe BSS qui contient toutes les variables globales, allouÃĐes statiquement au moment de l’ÃĐdition de lien lors de la compilation. La BSS est utilisÃĐe par de nombreux compilateurs pour dÃĐsigner une zone de donnÃĐes contenant les variables statiques dÃĐfinies dans les initialisations, et les dÃĐclarations avant void loop().
âĒ Le TAS sur lequel on entasse du bas vers le haut est destinÃĐ aux allocations dynamiques dans lequel on peut attribuer et libÃĐrer des blocs de mÃĐmoire. (NommÃĐ HEAP) Le TAS se fragmente gÃĐnÃĐralement au cours de l’ÃĐvolution du programme, (Car une variable locale libÃĐrant de la place laisse ÂŦ un trou Âŧ libre.) avec un risque notable de le rendre inutilisable.
DÃĐfragmenter HEAP par une sÃĐquence de code de type ÂŦ Ramasse miettes Âŧ est faisable mais relativement dangereux, car si l’on dÃĐplace une variable en cours d’utilisation, les consÃĐquences peuvent s’avÃĐrer ingÃĐrables.
âĒ La PILE nommÃĐe STACK mÃĐmorise temporairement :
* Les paramÃĻtres associÃĐs à l’appel des fonctions et procÃĐdures,
* Les adresses de retour des fonctions et procÃĐdures,
* Les variables locales aux fonctions et procÃĐdures.
La PILE est une zone de mÃĐmoire commençant en haut de la SRAM qui se charge vers le bas de façon linÃĐaire et continue lors des appels des fonctions ou des procÃĐdures. Elle se rÃĐduit vers le haut lors des retours. Chaque appel à une procÃĐdure empile l’adresse, chaque retour la dÃĐpile et libÃĻre la place. Au cours du programme, si un grand nombre de donnÃĐes sont sur le TAS qui est ÂŦ trÃĻs haut Âŧ, et que l’on enchaÃŪne un grand nombre d’appels à procÃĐdures sans retour, (Cas des subroutines rÃĐcursives par exemple) il peut arriver que l’espace entre PILE et TAS devienne nul. C’est la collision et l’ÃĐcrasement mutuel des OCTETs engendre un fonctionnement totalement imprÃĐvisible du microcontrÃīleur. Aussi, avant de considÃĐrer que notre programme est fiable, il faut impÃĐrativement vÃĐrifier que le risque de collision de PILE est dÃĐrisoire. L’expÃĐrience montre que lorsque toutes les initialisations de void setup() sont terminÃĐes, il est recommandÃĐ de ne pas avoir moins de 100 octets, car le risque de collision par fragmentation de la zone devient exagÃĐrÃĐ.
(@) : Sur la Fig.85 les noms des divers pointeurs sont imposÃĐs par le compilateur de l’IDE.
Prendre une assurance contre les collisions de PILE.
Invoquer du prÃĐventif dans ce domaine n’est pas une arme absolue. Observez le programme d’exploitation P15_Exploitation_pour_V4.ino dans lequel, en fin de procÃĐdure void setup() se trouve la sÃĐquence suivante qui affiche l’espace entre la PILE et le TAS Ã ce stade de l’exÃĐcution :

 Le rÃĐsultat sur la Fig.86 pour notre programme d’exploitation montre qu’avec une telle marge de sÃĐcuritÃĐ, si notre logiciel se met à faire des choses ÃĐtranges quand on l’a modifiÃĐ, c’est que l’on a commis une erreur de logique, car ici la collision de PILE n’est pas vraisemblable. Notez au passage que le compilateur indique une place disponible pour les variables locales de 894 octets ce qui n’est pas directement liÃĐ avec la RAM rÃĐservÃĐe aux donnÃĐes dynamiques. Enfin, je vous recommande trÃĻs trÃĻs fortement de toujours effectuer ce test quand vous venez de terminer un programme. Pour un skech qui consomme la presque totalitÃĐ des 30720 OCTETS disponibles, on peut manquer de place pour loger ce test. Il importe alors de supprimer un ou deux appels à procÃĐdures (Ce qui ne modifie pas l’ÃĐvaluation) pour faire provisoirement de la place. Une fois la marge de sÃĐcuritÃĐ vÃĐrifiÃĐe, vous repassez la ligne qui invoque SRAM_LIBRE en remarque et rÃĐtablissez l’appel aux deux procÃĐdures. Affaire classÃĐe !
Le rÃĐsultat sur la Fig.86 pour notre programme d’exploitation montre qu’avec une telle marge de sÃĐcuritÃĐ, si notre logiciel se met à faire des choses ÃĐtranges quand on l’a modifiÃĐ, c’est que l’on a commis une erreur de logique, car ici la collision de PILE n’est pas vraisemblable. Notez au passage que le compilateur indique une place disponible pour les variables locales de 894 octets ce qui n’est pas directement liÃĐ avec la RAM rÃĐservÃĐe aux donnÃĐes dynamiques. Enfin, je vous recommande trÃĻs trÃĻs fortement de toujours effectuer ce test quand vous venez de terminer un programme. Pour un skech qui consomme la presque totalitÃĐ des 30720 OCTETS disponibles, on peut manquer de place pour loger ce test. Il importe alors de supprimer un ou deux appels à procÃĐdures (Ce qui ne modifie pas l’ÃĐvaluation) pour faire provisoirement de la place. Une fois la marge de sÃĐcuritÃĐ vÃĐrifiÃĐe, vous repassez la ligne qui invoque SRAM_LIBRE en remarque et rÃĐtablissez l’appel aux deux procÃĐdures. Affaire classÃĐe !
Configuration qui produit la collision de PILE avec le TAS.
ConcrÃĻtement on oublie royalement qu’un nombre important d’interruptions se produisent en tÃĒche de fond. Quelquefois un codeur rotatif gÃĐnÃĻre des interruptions, sans compter les procÃĐdures delay(), les fonctions telles que millis(), la PWM … une foule de ressources internes dÃĐclenche des interruptions. C’est transparent car c’est le compilateur C++ qui sur ces instructions fait sa cuisine interne. Arrive un moment, ou trop de donnÃĐes sont empilÃĐe sur le TAS et viennent ÃĐcraser les adresses empilÃĐes. Puis le dÃĐlimiteur ‘}‘ de fin d’une procÃĐdure ou d’une fonction demande au processeur de dÃĐpiler une adresse de retour. Comme cette derniÃĻre contient les rÃĐsidus de la variable qui a ÂŦ ÃĐcrasÃĐ Âŧ les octets, le programme se ÂŦ branche Âŧ strictement n’importe oÃđ. Ãtant alors sur du code objet incohÃĐrent, le comportement du logiciel devient totalement alÃĐatoire.
PRÃVENTIF : Aucun programmeur n’est à l’abri d’une telle ÂŦ catastrophe Âŧ. Aussi, pour minimiser les risques il faut placer le minimum de chaÃŪnes de caractÃĻres dans le programme car en rÃĐalitÃĐ elles sont placÃĐes sur le TAS. Il faut ÃĐgalement (Et surtout.) minimiser les tableaux.
CURATIF : Quand se produit le Scratchhh prouitchhh bom bring protchhhh ! c’est qu’il est trop tard. Nous avons placÃĐ plein plein plein de bavardages, alors que nous savons que ces ÂŦ bla bla bla Âŧ sont entassÃĐs dans la mÃĐmoire dynamique. Notre dÃĐmonstrateur comporte une foule de procÃĐdures et de fonctions qui passent des paramÃĻtres, sans compter les for (byte I=1, …) qui ne sont pas gratuits. Les variables locales des boucles for doivent aussi Être logÃĐes en RAM. Enfin les tableaux sont gourmands en octets. Par exemple celui des caractÃĻres spÃĐcifiques consomme dÃĐjà 72 octets. Avouez qu’ici avec tous ces textes SÃĐrie et LCD on a poussÃĐ le bouchon un peu loin … mais ça passe !
REMÃDE : DÃĐgager impÃĐrativement de la place sur le TAS.
La suite est ici.