Rechercher
Drivers variateurs et autre contrôleurs d'actionneurs
- Kits robots
- Kits débutants Arduino
- Cartes programmables
- Shield
- Capteurs
- Moteurs et actionneurs
- Drivers variateurs et autre contrôleurs d'actionneurs
- Composants et accessoires robotique
- Alimentation
- Eléments mécaniques
- Domotique
- Impression 3D
- Outillage
- Produits 100% remboursés *
- Produits reconditionnés
- Chèque Cadeau
- Livres robotique
- Produits dérivés
- Coupe de France de Robotique
- Services
- Fin de série







Driver L9110 pour moteur CC
Carte Driver permettant de piloter jusqu'à 2 moteurs à courant continu.

En savoir plus
Description :
Le driver de moteur L9110S est une carte compacte qui peut être utilisée pour piloter deux moteurs courant continu, de manière indépendante, en contrôlant leur vitesse et leur direction. Cette carte permet donc de piloter de petits robots équipés de deux moteurs pour la propulsion tel que le robots 2WD.
Les deux puces qui équipent ce module de commande peuvent conduire jusqu'à 800mA en courant continu. Les cartes peuvent être commandées à partir de 2.5V permettant à ce module d'être utilisé avec une tension utilisée par les microcontrôleurs, 3.3V et 5V.
Quatre trous rendent cette carte facile à monter sur un robot ou tout autre projet.
Bien que pas prévu de base pour cela, ce module peut également être utilisé pour conduire un seul moteur pas à pas.
Les moteurs se connecte au driver par l'intermédiaire des deux borniers à vis.
La carte est équipé d'un connecteur avec 6 pins d'espacement 2.54mm.
On y retrouve :
2 pins pour l'alimentation au centre et deux fois deux pins notés A et B, de part et d'autre de l'alimentation pour piloter chacun des deux moteurs.
Caractéristiques techniques :
| Caractéristique | Valeur |
|---|---|
| Contrôle des moteurs | 2 puces L9110 |
| Tension d'entrée | 2,5 V à 12 V DC |
| Courant de sortie par canal | 800 mA en courant continu |
| Dimensions du PCB | 29,2 x 23 mm |
Exemple d'utilisation :
Mettre A1 à High et B1 à Low fait tourner le moteur 1 dans un sens, inverser le branchement fait tourner le moteur dans l'autre sens.
Mettre A1 et B1 tous les deux à High ou tous les deux à Low arrête le moteur.
Voici la table de vérité obtenue :
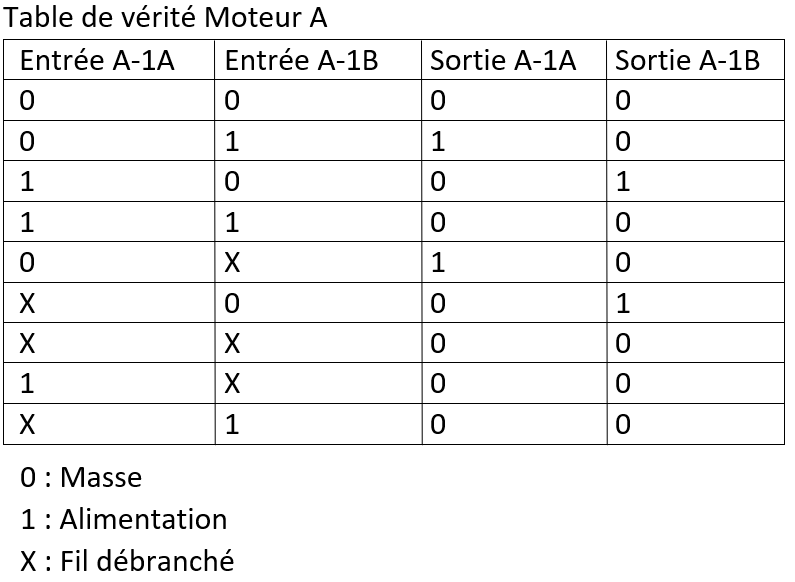
Il est possible d'utiliser un seul signal de modulation de largeur d'impulsion PWM pour contrôler la vitesse du moteur
et une sortie numérique pour changer sa direction.
Exemple de code:
// Exemple de fonction pour L9110
void avancerMoteur(uint8_t vitesse) // En avant{ analogWrite (PWMMOTEUR, vitesse); // Contrôle de vitesse en PWM " classique " digitalWrite(DIRECTIONMOTEUR, LOW);}void reculerMoteur(uint8_t vitesse) // En arrière{ analogWrite (PWMMOTEUR, 255 - vitesse); // inversion de la valeur car direction est à HIGH digitalWrite(DIRECTIONMOTEUR, HIGH); }
Liens utiles :
Vous avez besoin d’aide ? Des questions ? Venez nous poser des questions via le forum associé !
Avis
Accessoires




Les clients qui ont acheté ce produit ont également acheté...
-

Bouton poussoir
Petit bouton poussoir unipolaire pour CI ou...
-
Interrupteur miniature
Interrupteur 2 positions.
-

Nappe de 40 fils de type femelle femelle
Lot de 40 fils de type femelle-femelle à séparer.
-

Poulie GMT22
Poulie pour courroie GMT22.
-
4 relais pour arduino
Module contenant 4 relais inverseur type 1RT...
-

Clone Arduino Nano
Carte clone de l'arduino nano
-
Shield moteurs
Shield moteur pouvant piloter jusqu'a 4 moteurs...
-
RTC
Real Time Clock ou horloge temps réel. ( pile...
-

Servomoteur MG995
Servomoteur de modélisme.
-

Roue Pololu 40 mm
Roue Pololu 40mm.
Notes et avis clients